方案部署常见问题
本节介绍方形钢坯件方案的常见问题、可能的原因及解决方法。
问题一:路径规划时间较长
可能原因
-
Mech-Vision输出的位姿排序不合理,导致Mech-Viz路径规划失败次数较多。
-
Mech-Viz工程参数配置存在问题。
-
使用Mech-Viz进行路径规划时,进行了多次不必要的对称性尝试。
解决方法
-
使用位姿调整工具过滤位姿,如使用角度过滤的方式滤除抓取角度明显不合适的位姿。

-
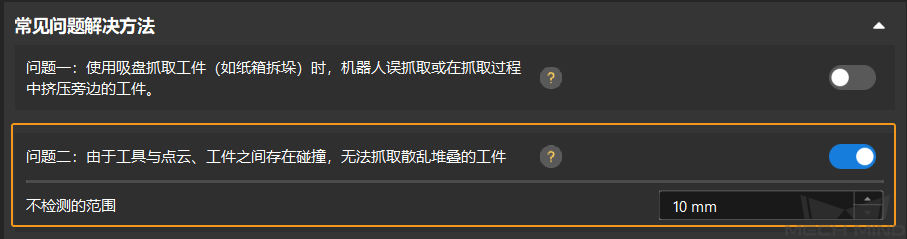
在Mech-Viz中关闭耗时较多且不必要的功能,如在碰撞检测选项卡下的常见问题解决方法中关闭问题一开关,不移除目标工件点云。

-
确保Mech-Viz工具栏中的性能优化项已全部开启。
-
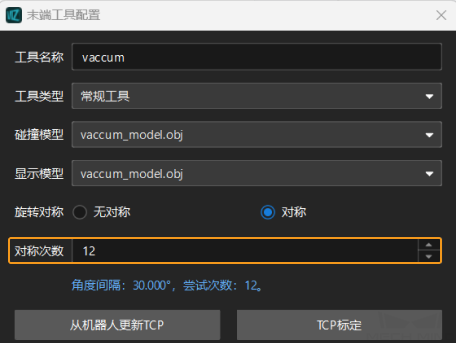
在配置末端工具时,根据实际情况设置对称次数值,减少不必要的抓取尝试。