Adjust Poses (Pose Confidence)
This tutorial first introduces the application scenarios and examples of sorting poses by confidence. Then it uses the example project “Adjust Poses (Pose Confidence)” as an application guide, illustrating how to adjust the parameters in the Adjust Poses V2 Step. It also provides notes for real applications.
Application Scenarios
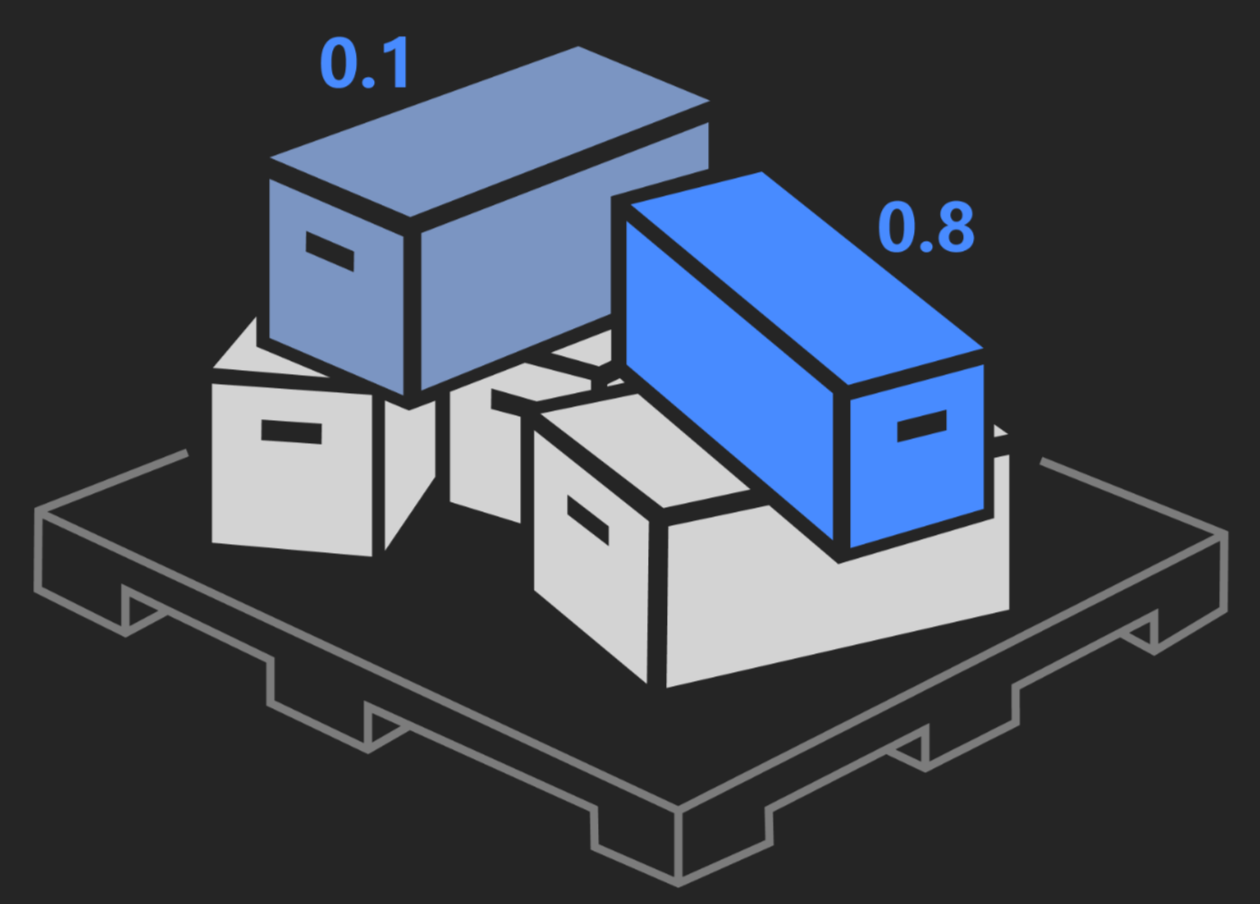
Sorting by pose confidence is suitable for scenarios where the sorting is based only on pose confidence. Target objects with higher pose confidence are picked first to secure a high picking success rate.
Application Examples
Taking ring picking as an example, this section uses the example project “Adjust Poses (Pose Confidence)” to sort the target objects by their pose confidence before picking. Objects with higher pose confidence are picked first.
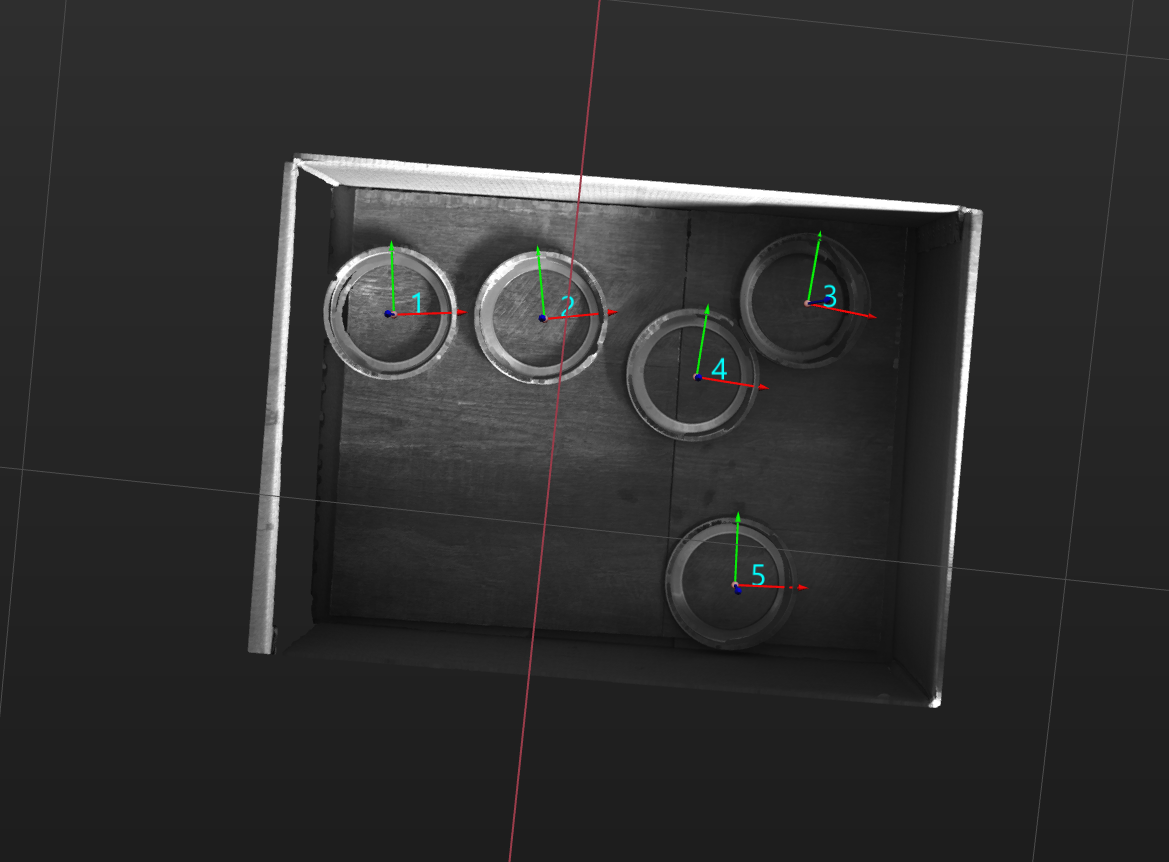
The robot picks rings as shown below.
The following sections introduce the application guidance and notes based on this example.
Application Guide
After understanding the application scenarios of sorting by pose confidence, you can go to the Solution Library to download the relevant project and learn how to adjust parameters according to the following content.
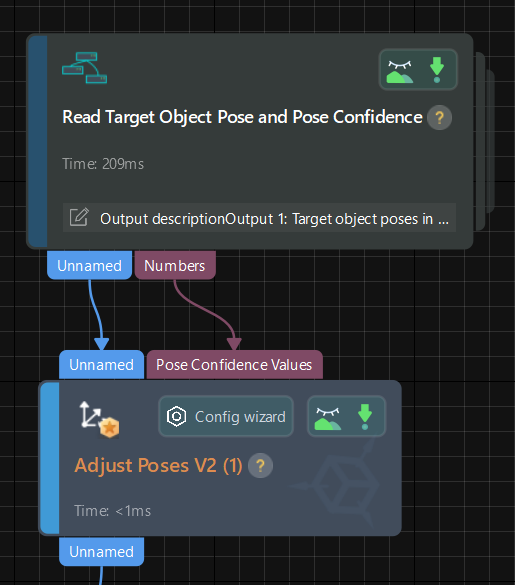
The “Adjust Poses (Pose Confidence)” project is located in the Mech-Vision Solution Library. You can go to the hands-on examples category to obtain the resources and create the project. After creating the project, click the Adjust Poses V2 Step, and then click the Config wizard button to open the pose adjustment tool and adjust parameters. This configuration consists of three workflows: pose adjustment, processing rules, and general settings.

-
Pose adjustment: Adjusts the pose orientations.
-
Processing rules: Sorts poses according to the actual requirement and filters out ineligible poses.
-
General settings: Provides settings other than pose processing. Currently, this step only supports sorting other data (such as the carton dimensions) together with the corresponding poses.
The following section introduces the key parameters to be adjusted in each workflow.
Pose adjustment
-
Select the method of adjusting the orientation.
To automatically adjust the object poses to make the Z-axes face upwards, it is recommended to set Orientation to Auto alignment.
For descriptions of orientation options, refer to Adjust Pose Orientation.
-
Select the application scenario.
To ensure that the Z-axis orientations of the poses are as uniform as possible, which facilitates sorting, set the Application scenario to Align Z-axes (Machine tending).
After configuring the pose adjustment workflow, click the Next button to enter the processing rules page.
Notes
In actual applications, please understand and follow the following precautions, then add the Adjust Poses V2 Step to your project, and connect the data streams to sort the poses by confidence from high to low.
-
The Adjust Poses V2 Step should be preceded by a Step or Procedure, such as Read Target Object Pose and Pose Confidence Procedure, that recognizes object poses and correctly outputs the confidence (for example, the matching confidence and deep learning scores) corresponding to the poses. The pose output port of this Step or Procedure connects the pose input port of the Adjust Poses V2 Step for pose sorting.
-
The Adjust Poses V2 Step should be followed by a Step with a pose input port, such as the Path Planning and Output Steps, to output the adjusted poses, so that the robot can pick the rings by their pose confidence from high to low.