Issues with “Point Cloud Preprocessing” Process
This section covers common issues regarding the “Point cloud preprocessing” process and the corresponding possible causes and solutions.
Poor Point Cloud Quality
-
Symptom
After point cloud preprocessing, the quality of point clouds was poor.
-
Possible causes
-
The camera exposure parameters were not set properly.
-
Strong on-site lighting interfered with image acquisition.
-
The bin walls are reflective, which results in poor point cloud quality.
-
-
Solutions
-
Set appropriate camera exposure parameters according to the actual situation of the target object. For highly reflective objects, it is recommended to set the Fringe Coding Mode of Laser to Reflective in Mech-Eye Viewer. This parameter is visible only when the visibility is set to Expert or Guru.
-
Shade the station to avoid direct exposure to strong light.
-
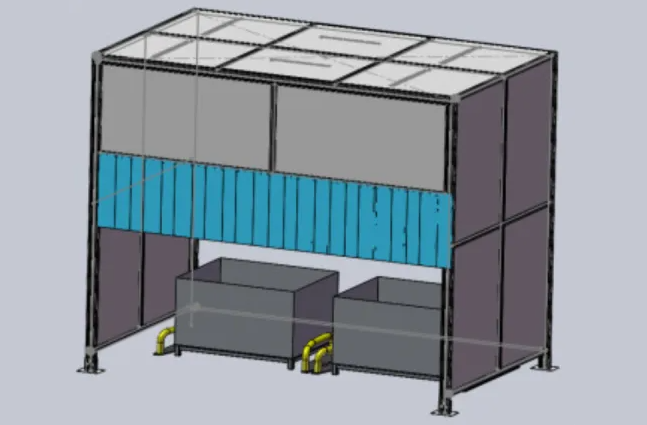
It is recommended to use non-reflective bins, such as bins with hollow walls.
-
Background Point Cloud Not Removed
-
Symptom
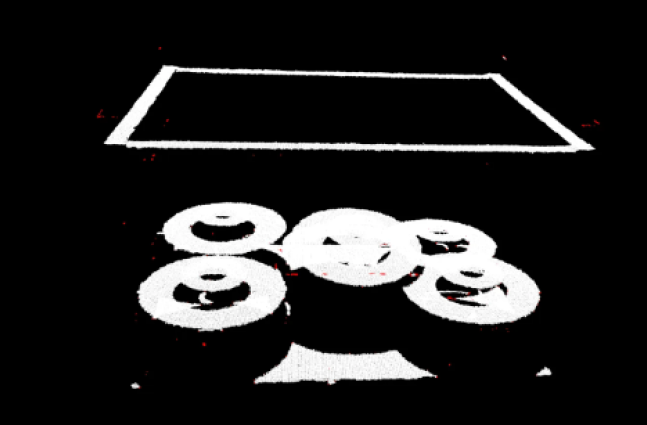
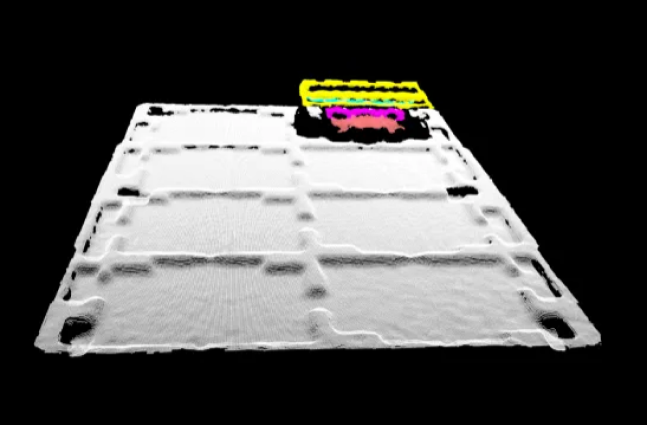
After point cloud preprocessing, the background point cloud was not removed, which affected the subsequent recognition result. As shown below, the background point cloud is mistakenly recognized as a target object.
-
Possible cause
The setting of parameters related to point cloud preprocessing was not proper.
-
Solutions
-
Lower the Max polar angle parameter under “Point filter” to remove the point cloud stuck between the target object and background while ensuring the point cloud of the target object remains as complete as possible.
-
Adjust the parameters under “Remove noise by clustering.”
Parameter Instruction Cluster radius
In most cases, keep the default setting. Increasing this value can cluster point clouds that are farther away into a cluster, but it may result in a longer Step execution time.
Min point count per cluster
The parameter value should be greater than the number of points in the noise point cloud and smaller than the number of points in the target object point cloud.
Max point count per cluster
The parameter value should be greater than the number of points in the target object point cloud. If the number of points in the background point cloud to be removed is large, set the value of this parameter to be smaller than the number of points in the background point cloud.
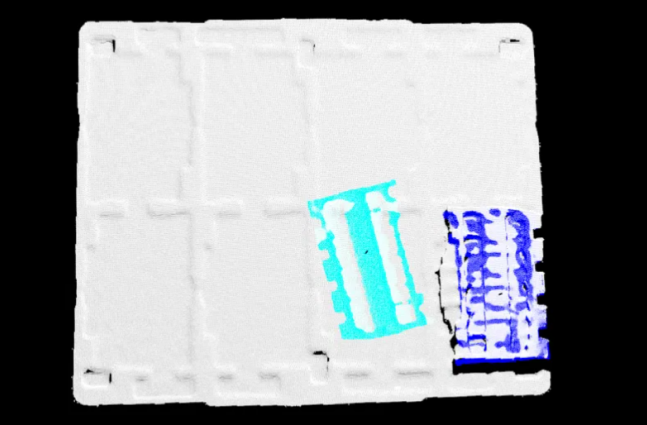
After adjusting the above parameters, you can remove the background point cloud, i.e., the white point cloud in the figure below.
If the background point cloud cannot be removed by point cloud clustering, you can enable Assist recognition with deep learning in the “Target object selection and recognition” process.
-
Noise in Point Clouds
-
Symptom
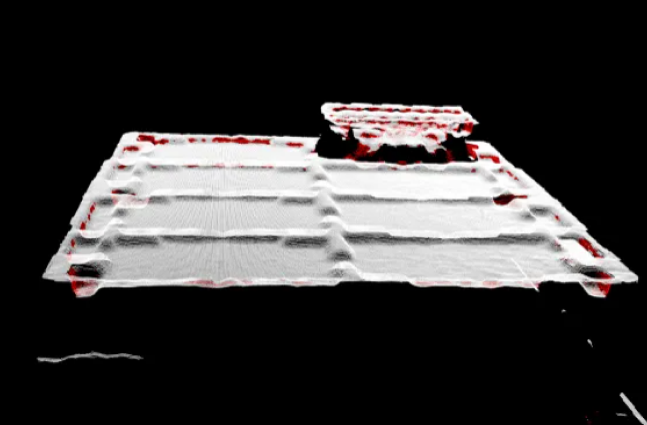
There was noise in the original point clouds.
-
Solution
You can remove noise from point clouds by adjusting the Min point count per cluster under “Remove noise by clustering.”