Approach to Troubleshooting Picking Errors
When an “robot picking inaccuracy” issue occurs, usually you can troubleshoot picking errors according to the process shown in the following figure:
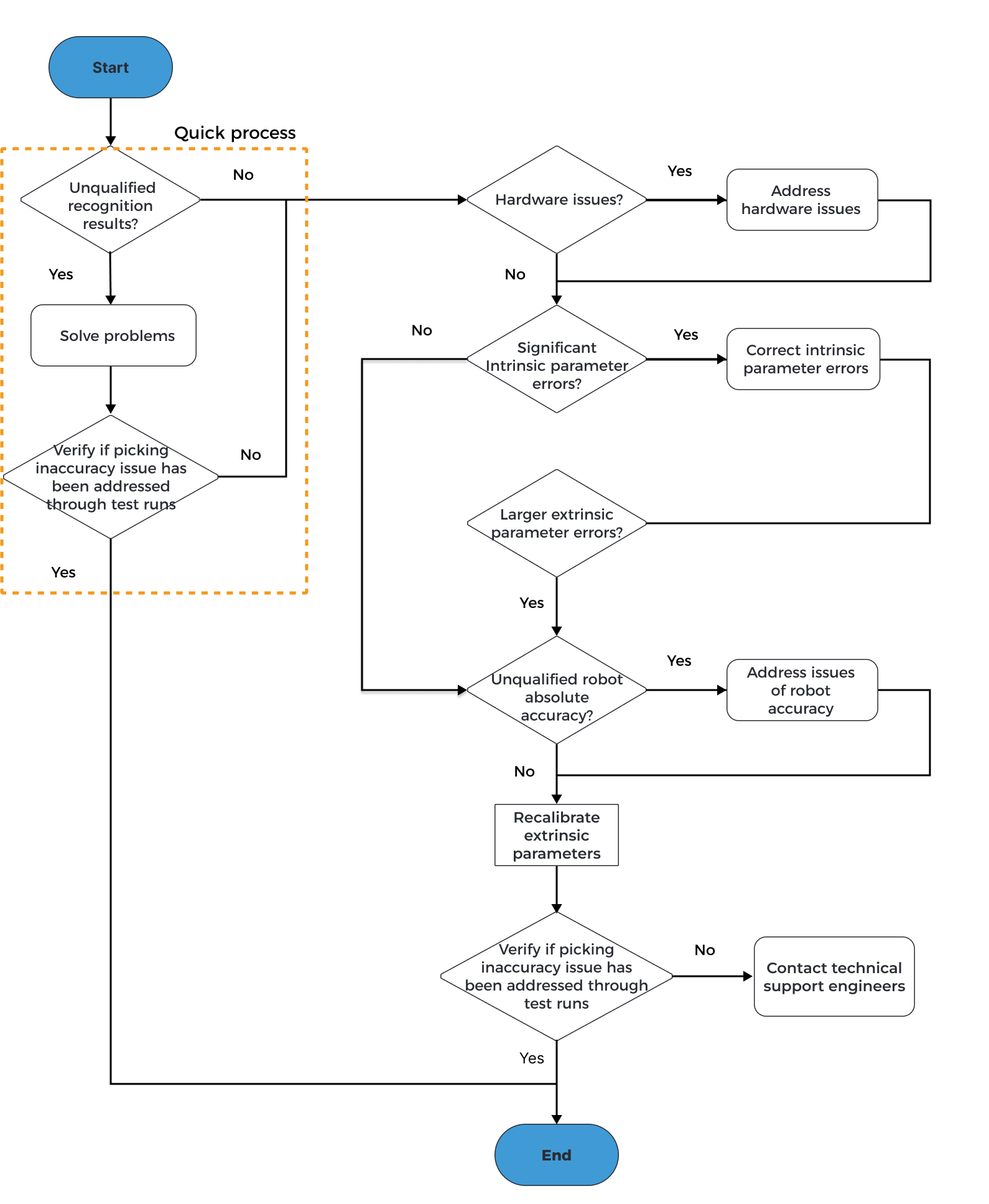
| The following part describes the general guidelines for troubleshooting picking errors. For details about the check methods, criteria, and error correction methods for each check item, see instructions in subsequent sections. |
Quick process
Based on the factors that are most likely to affect the picking accuracy, first check whether the recognition effect has degraded (whether the point cloud quality has degraded, whether the deep learning inference effect has degraded (if the project uses deep learning), or whether the 3D matching effect has degraded).
-
If yes, immediately locate the cause of the issue and contact Technical Support to solve the issue. Then conduct a trial run to verify whether the issue has been solved.
-
If yes, the troubleshooting ends.
-
If no, follow the complete process to continue troubleshooting.
-
-
If no, follow the complete process to continue troubleshooting.
Complete process
If the recognition effect of the vision project does not degrade according to the quick process above, follow the below process to continue troubleshooting:
-
Check whether hardware issues exist.
-
If yes, fix the hardware issue first and then proceed to the next step.
-
If no, go to the next step.
-
-
Check whether the intrinsic parameter error becomes larger.
-
If yes, correct intrinsic parameters first, and then proceed to the next step. If the intrinsic parameters cannot be corrected, contact Technical Support to solve the issue.
-
If no, go to the next step.
-
-
Evaluate whether the extrinsic parameter error becomes larger. Then go to the next step.
-
Check whether the robot absolute accuracy declines.
-
If so, deal with the robot accuracy issues before proceeding to the next step.
-
If no, go to the next step.
-
-
Verify whether the picking inaccuracy issue has been addressed through test runs.
-
If yes, the troubleshooting ends.
-
If no, contact Technical Support.
-