实现抓取
抓取是3D视觉引导应用部署的最终目的。在该阶段,你需要搭建机器人抓取流程,让机器人在视觉结果的引导下精准抓取。
搭建机器人抓取流程的方式因选择的机器人通信方式的不同而存在差异,如下图所示。
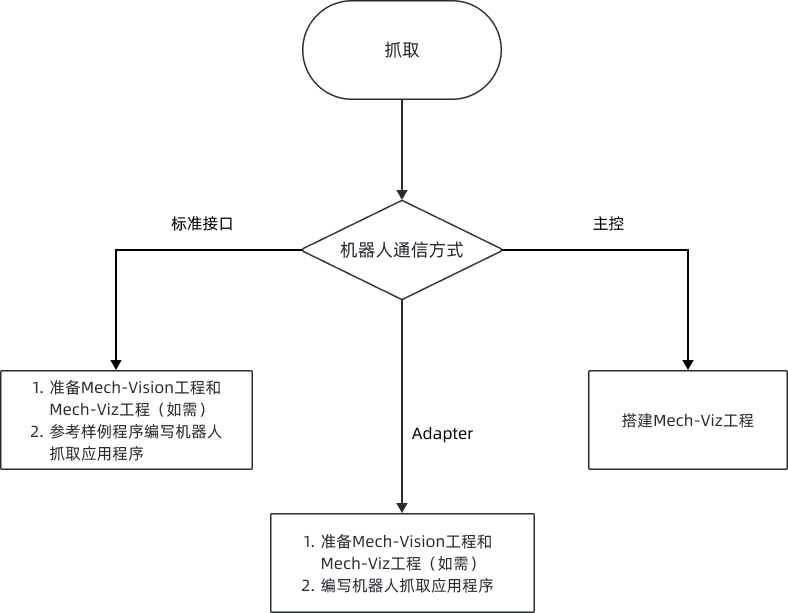
| 如果项目对抓取精度有较高要求,请在部署时参考专题:抓取精度提升确保应用良好的抓取精度。 |
标准接口通信方式下的抓取流程搭建
如果你使用标准接口通信方式,可以在机器人侧编写机器人抓取应用程序,实现机器人在视觉引导下进行抓取作业。梅卡曼德为已适配的机器人提供标准接口样例程序,你可以参考样例程序编写抓取应用程序。
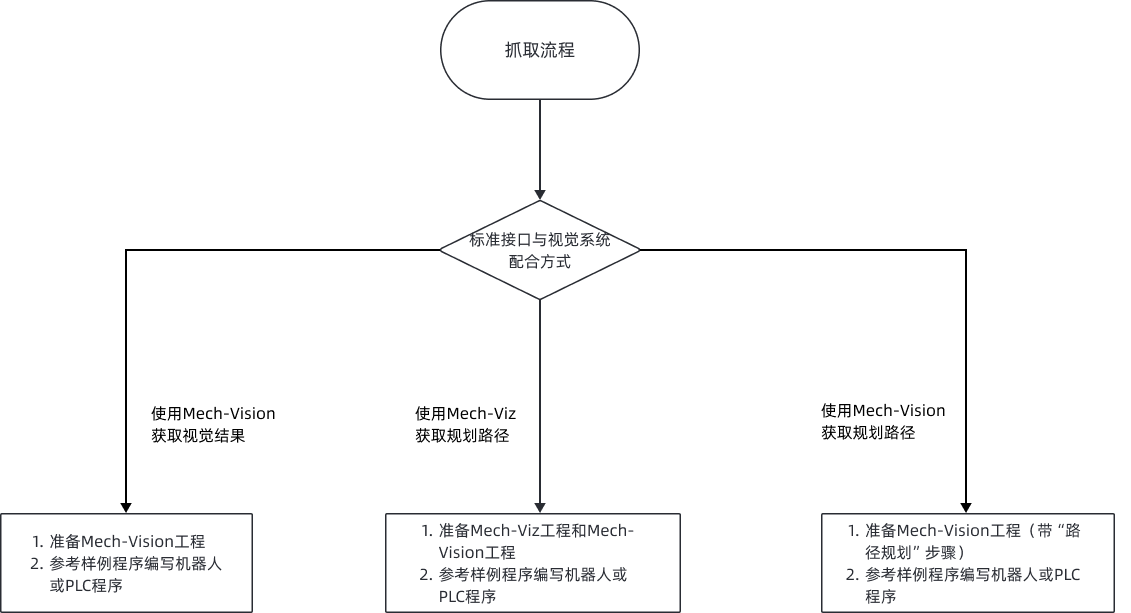
在使用标准接口通信时,根据所创建的工程以及视觉系统输出结果的不同,标准接口与视觉系统的配合方式大致分为如下三类:
下文将详细介绍三种配合方式。
使用Mech-Vision获取视觉结果
该方式指机器人或PLC通过标准接口指令触发Mech-Vision工程,并获取Mech-Vision输出的视觉结果。
需创建的工程 |
Mech-Vision工程 |
|---|---|
视觉系统输出的结果 |
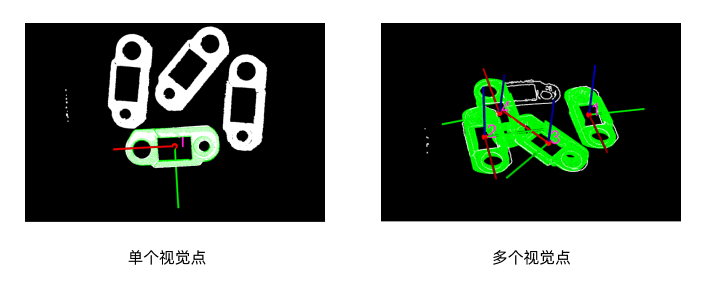
视觉结果,可以包含一个或多个视觉点,每个视觉点包括位姿、工件信息等数据
|
| 视觉结果由Mech-Vision工程的输出步骤输出。注意该步骤的端口类型参数需设置为预定义(视觉结果)或自定义。 |
使用该方式的一般流程为:
-
机器人或PLC通过标准接口指令触发Mech-Vision工程运行。
-
视觉系统运行Mech-Vision工程,并输出视觉结果。
-
机器人或PLC通过标准接口指令获取视觉结果。
-
机器人在视觉结果的引导下进行抓取。
你需要编写机器人或PLC程序来实现上述流程。梅卡曼德为已支持的机器人或PLC提供丰富的样例程序,其中第一个样例程序就是按照上述流程实现的。此外,你可以参考其他样例实现更多扩展功能。更多关于编写机器人或PLC程序的信息,请参考标准接口通信。
使用Mech-Viz获取规划路径
该方式是指机器人或PLC通过标准接口指令触发Mech-Viz工程运行,并获取Mech-Viz输出的规划路径。
需创建的工程 |
Mech-Viz工程和Mech-Vision工程 |
|---|---|
视觉系统输出的结果 |
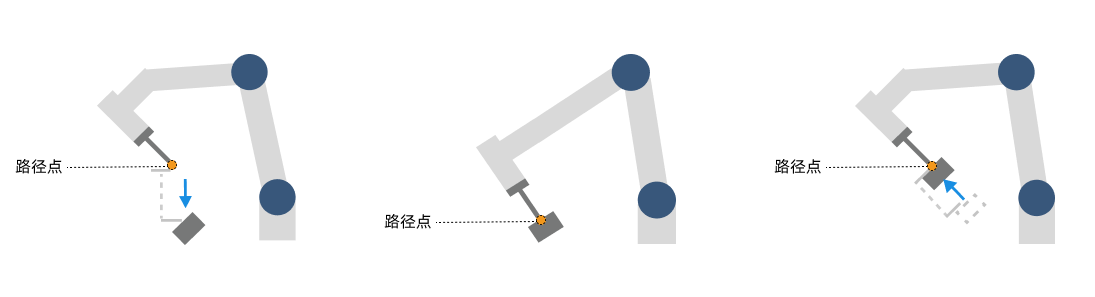
规划路径,由一系列路径点组成,每个路径点包含机器人位姿、工件信息、移动类型等数据
|
|
使用该方式的一般流程为:
-
机器人或PLC通过标准接口指令触发Mech-Viz工程运行。
-
视觉系统运行Mech-Viz工程,并输出规划路径。运行Mech-Viz工程过程中,Mech-Viz会调用Mech-Vision工程获取视觉结果,并基于视觉结果规划出机器人移动路径。
-
机器人或PLC通过标准接口指令获取规划路径。
-
机器人在规划路径的引导下进行抓取。
你需要编写机器人或PLC程序来实现上述流程。梅卡曼德为已支持的机器人或PLC提供丰富的样例程序,其中第二个样例程序就是按照上述流程实现的。此外,你可以参考其他样例实现更多扩展功能。更多关于编写机器人或PLC程序的信息,请参考标准接口通信。
使用Mech-Vision获取规划路径
该方式是指机器人或PLC通过标准接口指令触发Mech-Vision工程运行,并获取Mech-Vision输出的规划路径。
需创建的工程 |
Mech-Vision工程 |
|---|---|
视觉系统输出的结果 |
规划路径,由一系列路径点组成,每个路径点包含机器人位姿、工件信息、移动类型等数据
|
使用该方式的一般流程为:
-
机器人或PLC通过标准接口指令触发Mech-Vision工程运行。
-
视觉系统运行Mech-Vision工程,并输出规划路径。
-
机器人或PLC通过标准接口指令获取规划路径。
-
机器人在规划路径的引导下进行抓取。
你需要编写机器人或PLC程序来实现上述流程。梅卡曼德为已支持的机器人或PLC提供丰富的样例程序,其中第三个样例程序就是按照上述流程实现的。此外,你可以参考其他样例实现更多扩展功能。更多关于编写机器人或PLC程序的信息,请参考标准接口通信。
主控通信方式下的抓取流程搭建
如果你使用主控通信,可以在Mech-Viz软件中以图形化的方式搭建机器人抓取流程(即Mech-Viz工作流程)。
关于如何搭建Mech-Viz工作流程,请参考Mech-Viz工作流程搭建。