机器人通信配置
在本教程中,你将学习如何将机器人标准接口程序烧录到发那科机器人,并完成梅卡曼德视觉系统与机器人的标准接口通信配置。
|
烧录前准备
检查硬件及软件版本
-
确认FANUC机器人系统版本为V7.5、V7.7、V8.x或V9.x版本。
单击查看操作方法
-
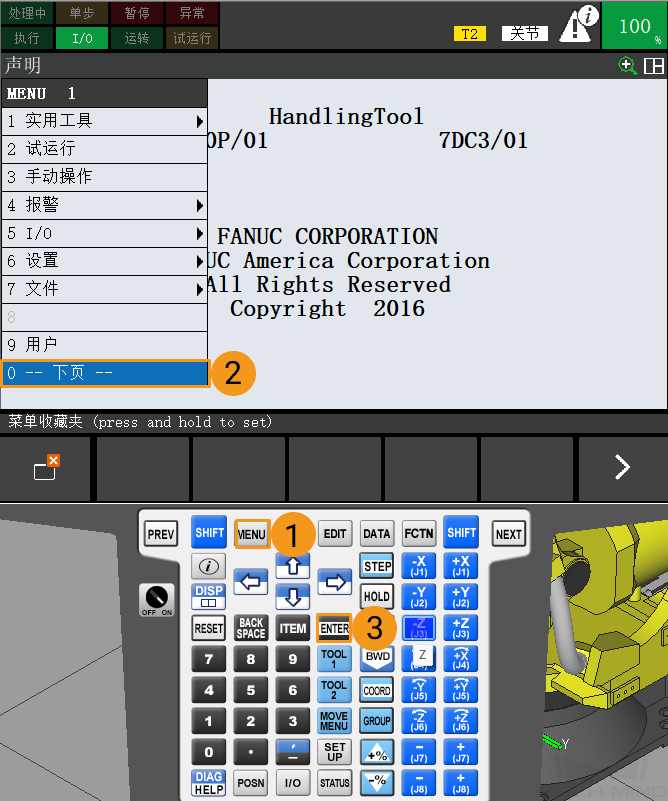
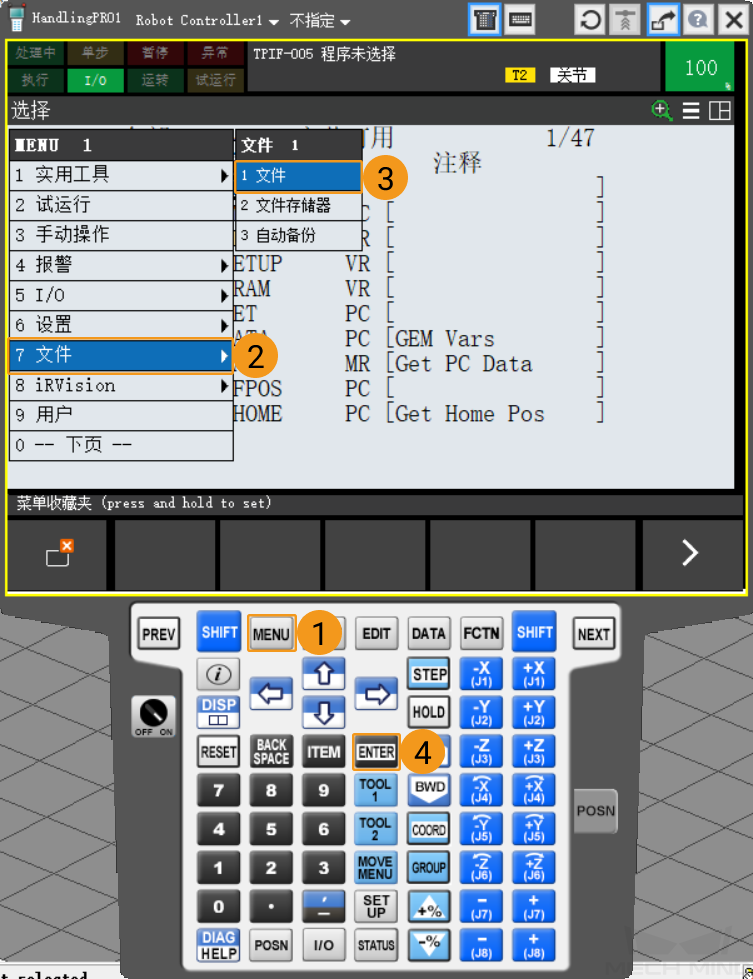
在示教器上,按MENU键,使用方向键依次选择,然后按ENTER键。

-
在声明界面,图中框选的部分就是机器人控制器的系统版本。

-
-
确认FANUC机器人已安装所需软件包:
-
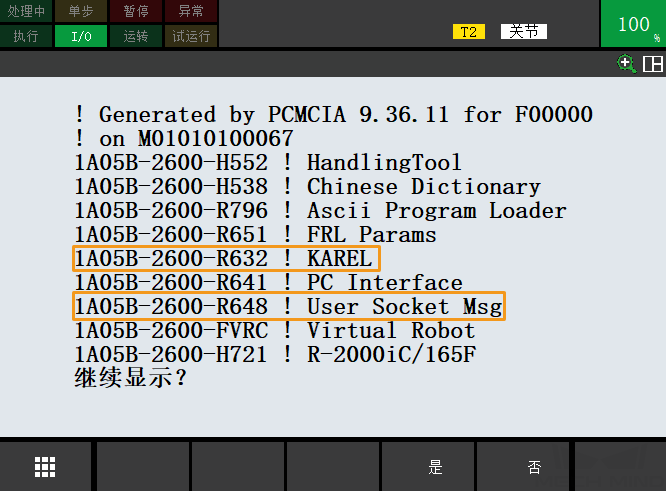
R651 或 R632(KAREL),安装其中一个即可
-
R648(User Socket Msg)
单击查看操作方法
-
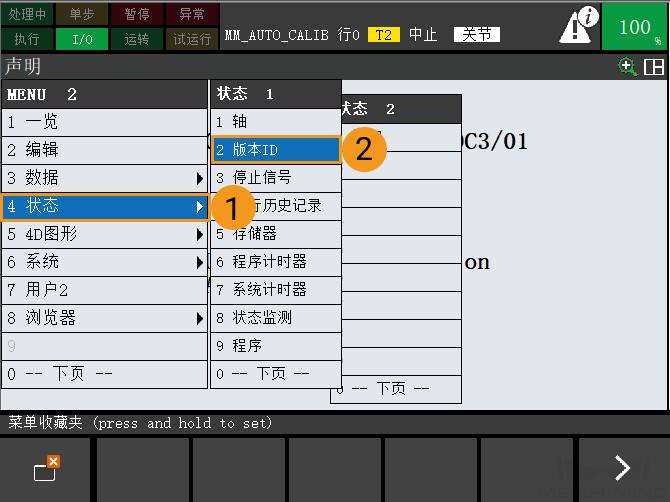
在示教器上,按MENU键,使用方向键选择下页,然后按ENTER键。
-
使用方向键依次选择,然后按ENTER键。
-
按NEXT键,然后按F3键(即选择订购文件)。

-
在如下界面,确认已安装所需软件包。
-
建立网络连接
设置IP地址
-
在示教器上,按MENU键,使用方向键依次选择,然后按ENTER键,进入设置协议界面。

-
使用方向键选中TCP/IP,按F3键(即选择详细),进入设置主机通信界面。

-
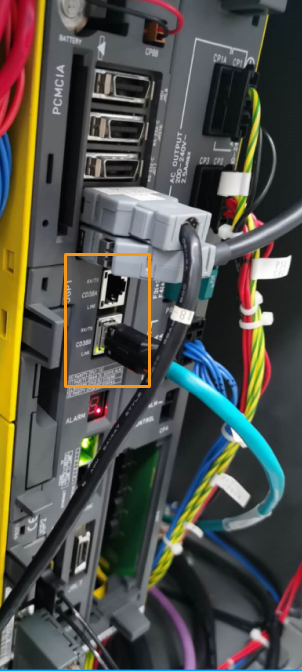
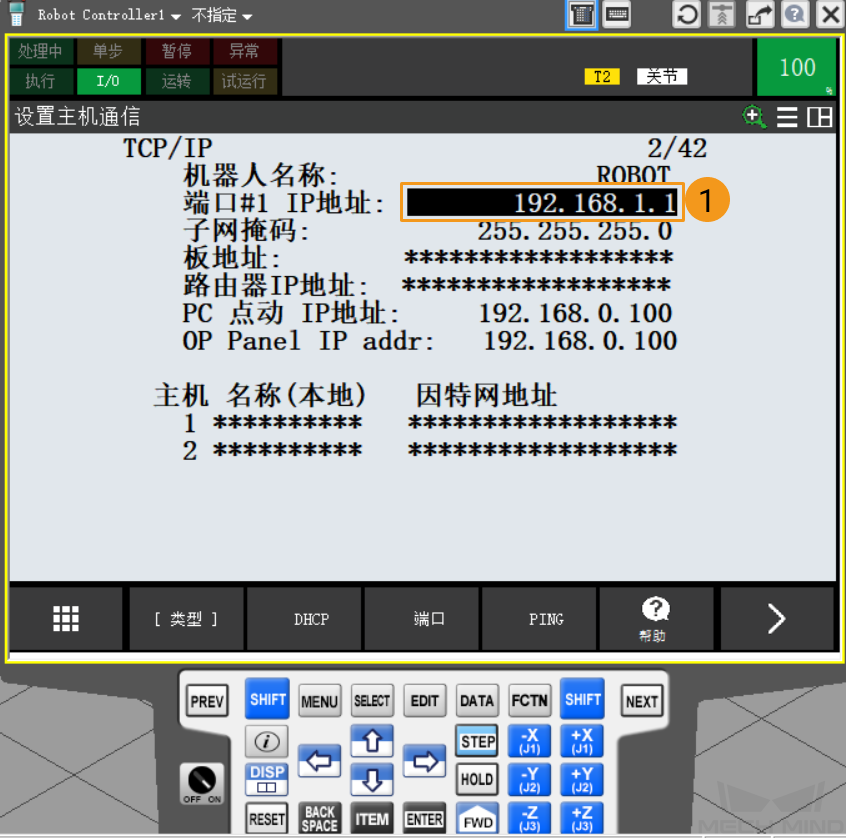
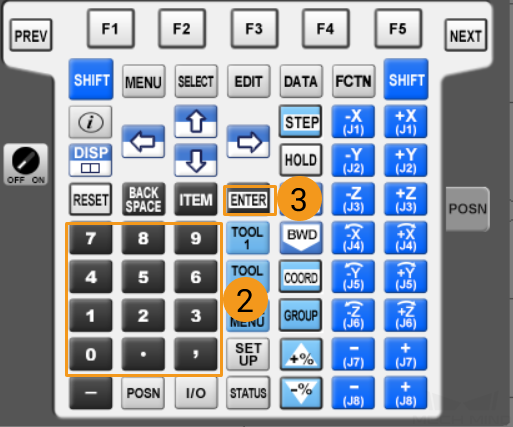
若网线插在CD38A网口(对应端口1,如下图所示),使用方向键选择IP地址,按ENTER键,使用示教器键盘输入机器人IP地址(机器人IP地址需与工控机IP地址在同一网段,但两者并不相同),最后按ENTER键。
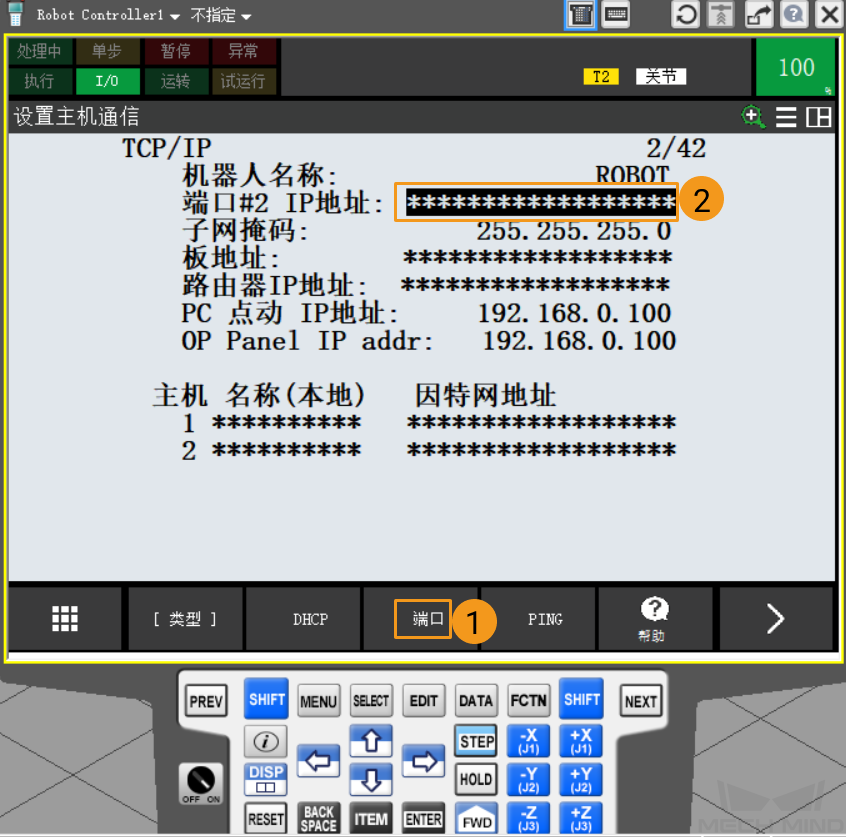
若网线插在CD38B网口(对应端口2),按F3键(即选择端口)切换至端口2,使用方向键选择IP地址,按ENTER键,使用示教器键盘输入机器人IP地址(机器人IP地址需与工控机IP地址在同一网段,但两者并不相同),最后按ENTER键。
创建Mech-Vision方案并保存
-
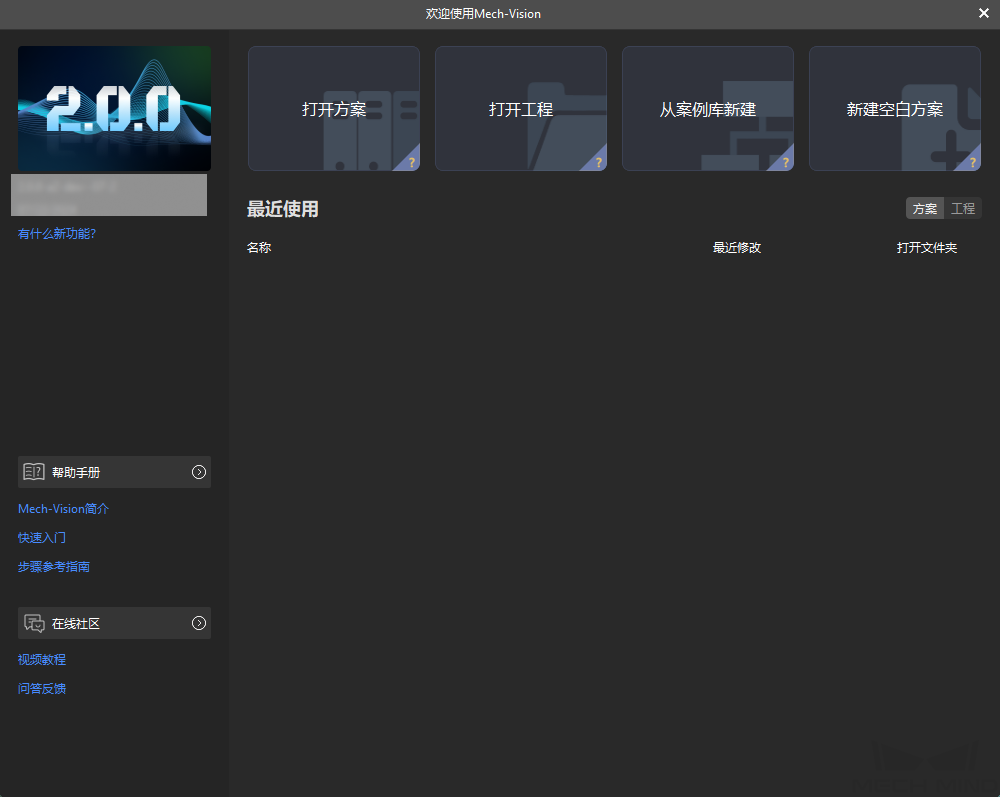
打开Mech-Vision,若出现如下欢迎界面,表示Mech-Vision启动成功。
-
在Mech-Vision欢迎界面中单击从案例库新建按钮,打开案例库。

案例库是包含不同行业的示例方案或工程的资源库。 -
在案例库的应用模板选项卡中选择无序工件上料案例,如下图所示。

若未在案例库中找到无序工件上料案例,可单击案例库右上角的下载图标。
-
设置方案名称和路径,然后单击创建按钮。
工程创建完毕后,在Mech-Vision主界面左上角的工程列表中将显示创建好的方案和工程。
-
方案是实现一个视觉应用所需的机器人与通信、视觉处理、路径规划等功能配置和数据的集合。
-
工程是方案中视觉处理的工作流程。通常一个方案包含一个Mech-Vision工程即可,但复杂的业务场景中可能需要多个工程。
-
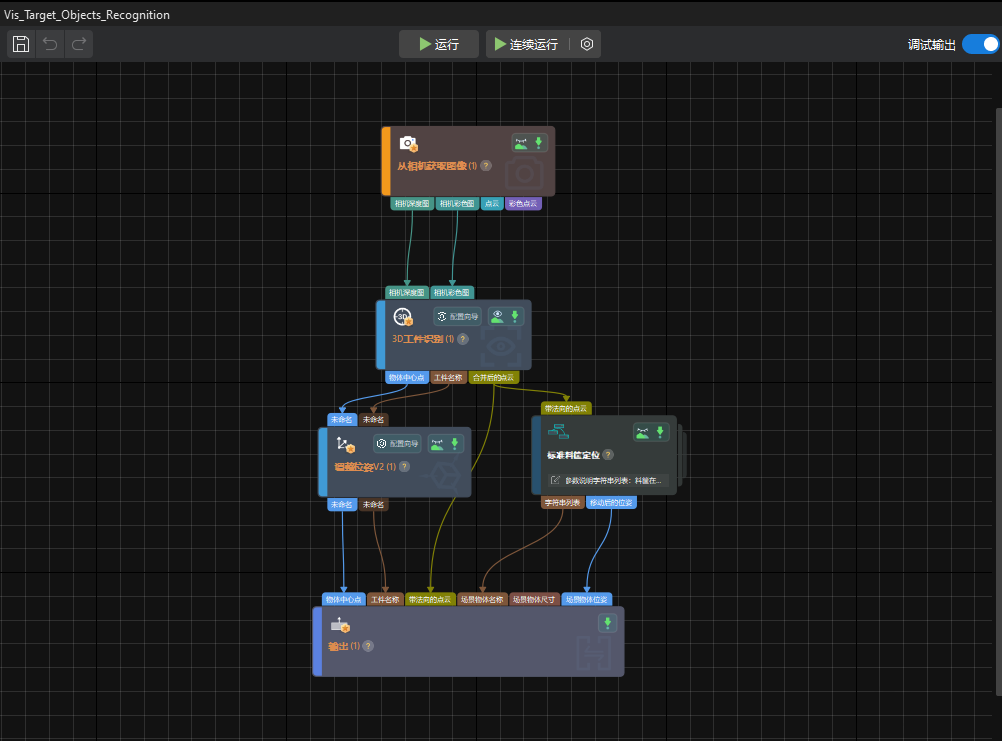
无序工件上料案例仅包含一个工程“Vis_Target_Object_Recognition”。
在主界面中心区域的工程编辑区中将显示“Vis_Target_Object_Recognition”工程。
-
-
在工程列表中,右键单击该方案,然后勾选自动加载当前方案按钮。
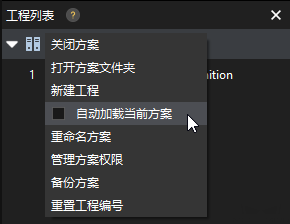
将方案设置为自动加载状态后,工程名称将显示为绿色,且工程名称左侧将显示工程编号。
工程编号将会在机器人抓放应用程序中使用,用于触发Mech-Vision工程运行。 -
在菜单栏中选择。
备份机器人文件
-
插入U盘,按MENU键,使用方向键依次选择,然后按ENTER键,进入文件界面。
-
请确保所使用的U盘容量不大于32G,且U盘的文件系统格式为FAT32。
-
U盘可插入控制柜或示教器中,请根据实际情况选择。
-
-
在文件界面,按F5键(即选择工具),使用方向键选择切换设备,按ENTER键。

-
若U盘插入控制柜,使用方向键选择选择USB盘(UD1:),按ENTER键。若U盘插入示教器,使用方向键选择选择TP上的USB(UT1:),按ENTER键。

-
在文件夹界面,按F5键(即选择工具),使用方向键选择创建目录,然后按ENTER键。

-
请根据需要选择单词、大写、小写或其他/键盘,按F1~F5键,输入文件夹名称(以AOA为例),按ENTER键,完成后进入该文件夹。

-
按F4键(即选择备份),使用方向键选择以上所有,按ENTER键,开始备份文件。

-
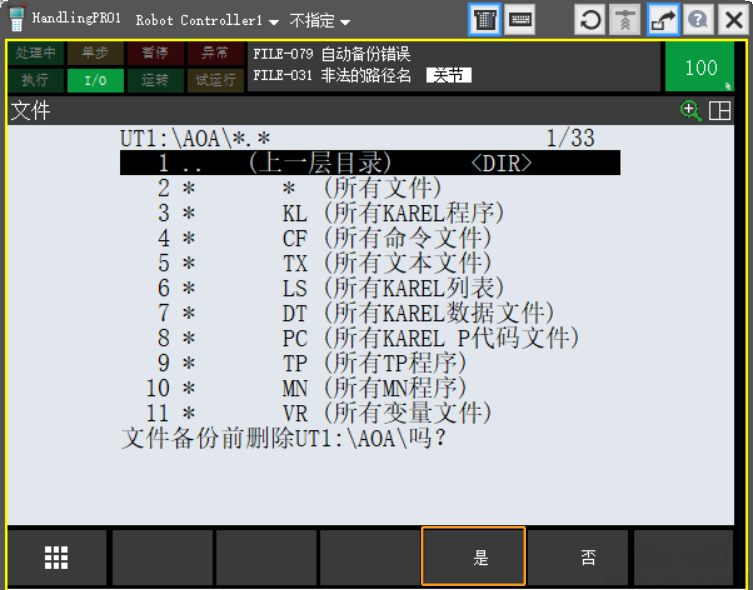
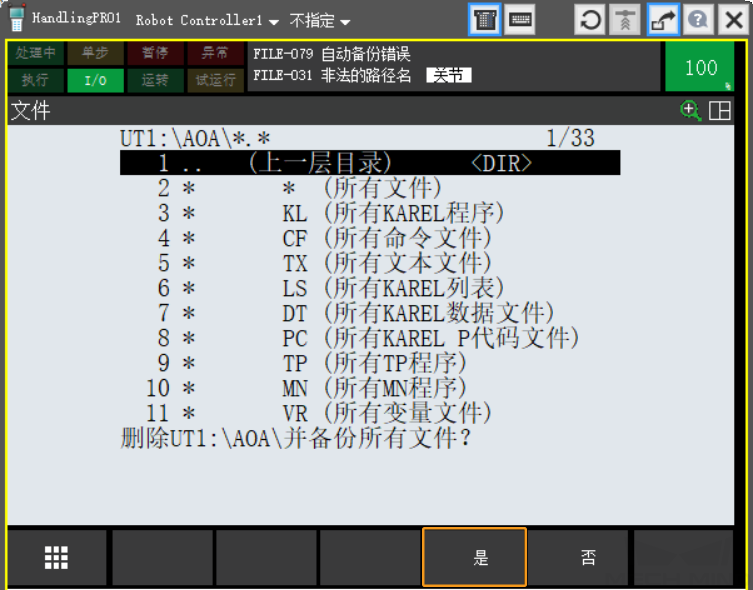
开始备份后出现删除提示,按F4键(即选择是),删除新建文件夹的内容。确认后,出现备份文件提示,按F4键(即选择是),开始备份机器人文件。
-
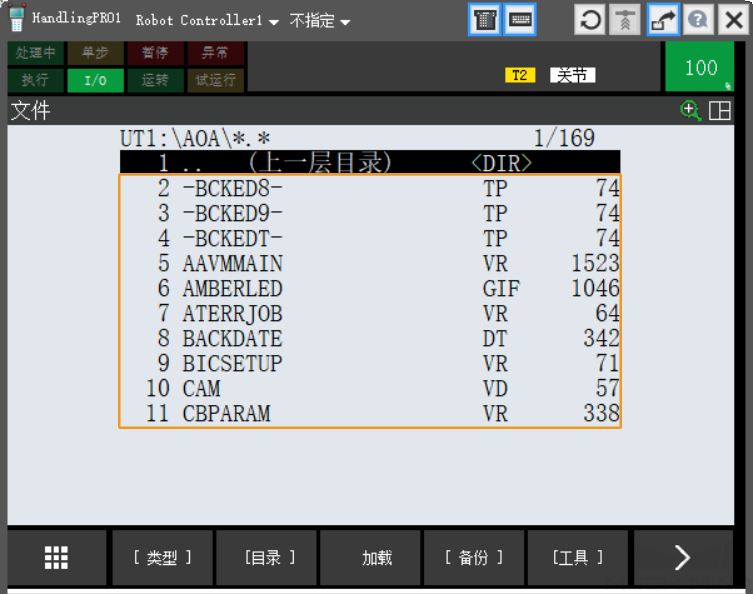
备份完成后,使用方向键选择所有文件,按ENTER键,可查看已备份文件。

烧录文件至机器人中
-
插入U盘,按MENU键,使用方向键依次选择,然后按ENTER键,进入文件界面。
U盘可插入控制柜或示教器中,请根据实际情况选择。

-
按F5键(即选择工具),使用方向键选择切换设备,按ENTER键。

-
若U盘插入控制柜,使用方向键选择选择USB盘(UD1:),按ENTER键。若U盘插入示教器,使用方向键选择选择TP上的USB(UT1:),按ENTER键。

-
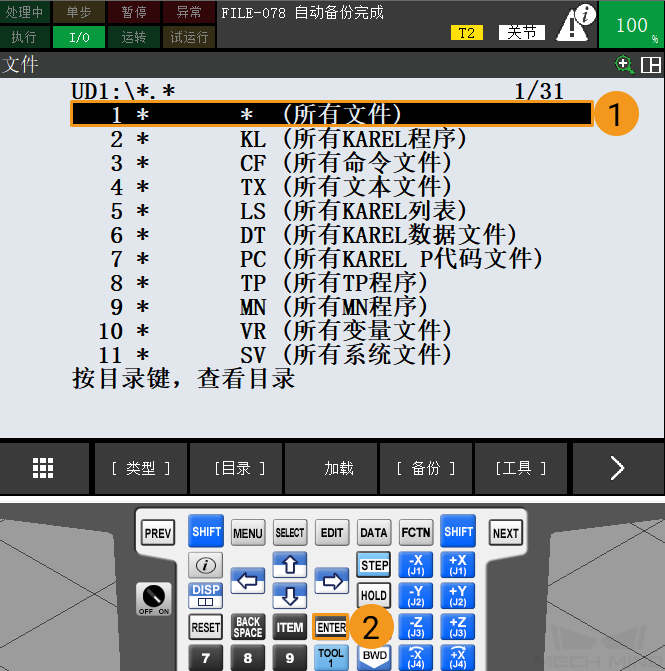
使用方向键选择所有文件,然后按ENTER键,可查看U盘根目录文件。
-
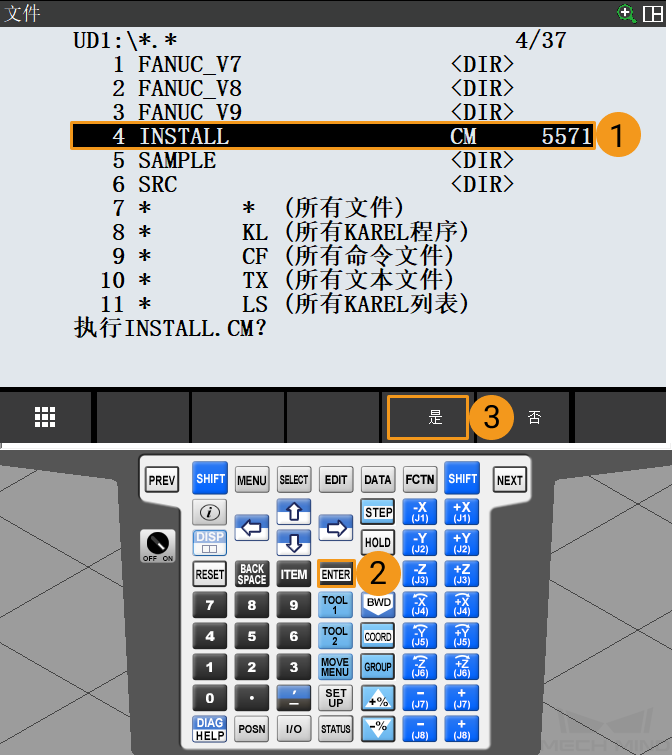
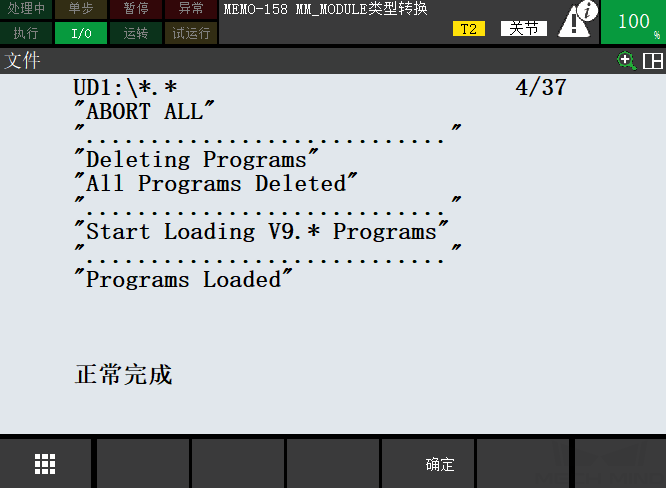
在U盘根目录文件下,使用方向键选择INSTALL,按ENTER键,然后按F4键(即选择是),便可开始执行烧录程序。
-
当出现如下信息(Programs Loaded)时,表示导入成功。按F4键(即选择确定),返回上一界面。
测试标准接口通信
选择和修改通信测试程序
-
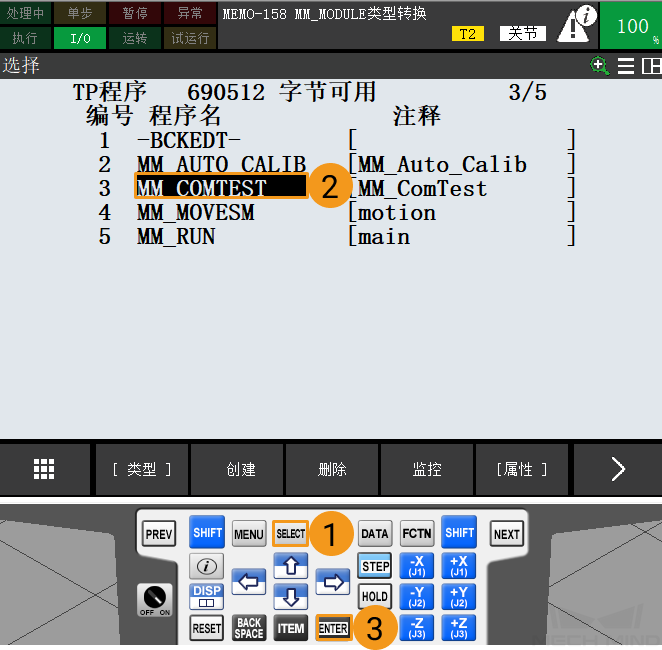
按SELECT键,进入程序选择界面,使用方向键选择MM_COMTEST,按ENTER键,打开程序文件。
-
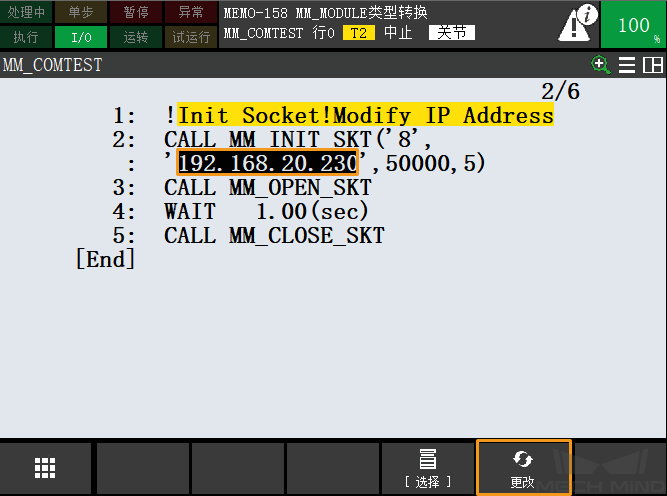
在MM_COMTEST程序页面中,设置MM_INIT_SKT指令的参数。该指令共有4个参数,使用方向键选中某个参数,按F5键(即选择 更改)根据实际情况设置。
-
参数 1:客户端号(1~8)。
-
参数 2:工控机IP地址。
-
参数 3:工控机服务端口号,与Mech-Vision中设置的主机端口号保持一致。
-
参数 4:超时等待时间(单位为min)。
-
运行通信测试程序
-
示教器上钥匙开关转至ON,控制柜上旋钮旋转至T1。
-
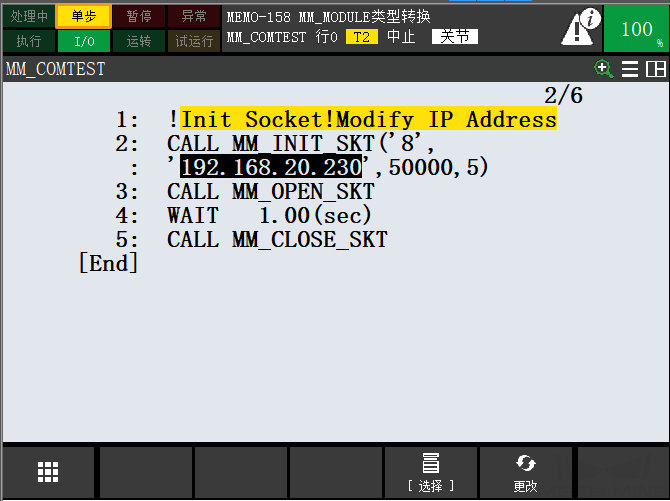
在示教器界面,按STEP键,机器人切换至单步运行模式,此时示教器显示屏上的单步变为黄色。

-
按示教器背部的使能开关(任一均可)。

-
按住 SHIFT,同时不断按下 FWD,以手动单步运行MM_COMTEST程序。当出现如下信息(“MM:Restart Robot”)时,重启机器人。

-
重启机器人后,参考上文,按住SHIFT,同时不断按下FWD,以手动单步运行MM_COMTEST程序。
-
若机器人与视觉系统间的通信连接成功,则Mech-Vision日志窗口的控制台标签页下会出现相关提示。
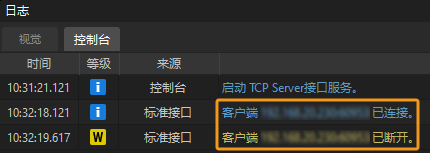
至此,你已将机器人标准接口程序及配置文件导入到机器人系统中,建立了视觉系统与机器人的标准接口通信。