抓不准问题排查思路
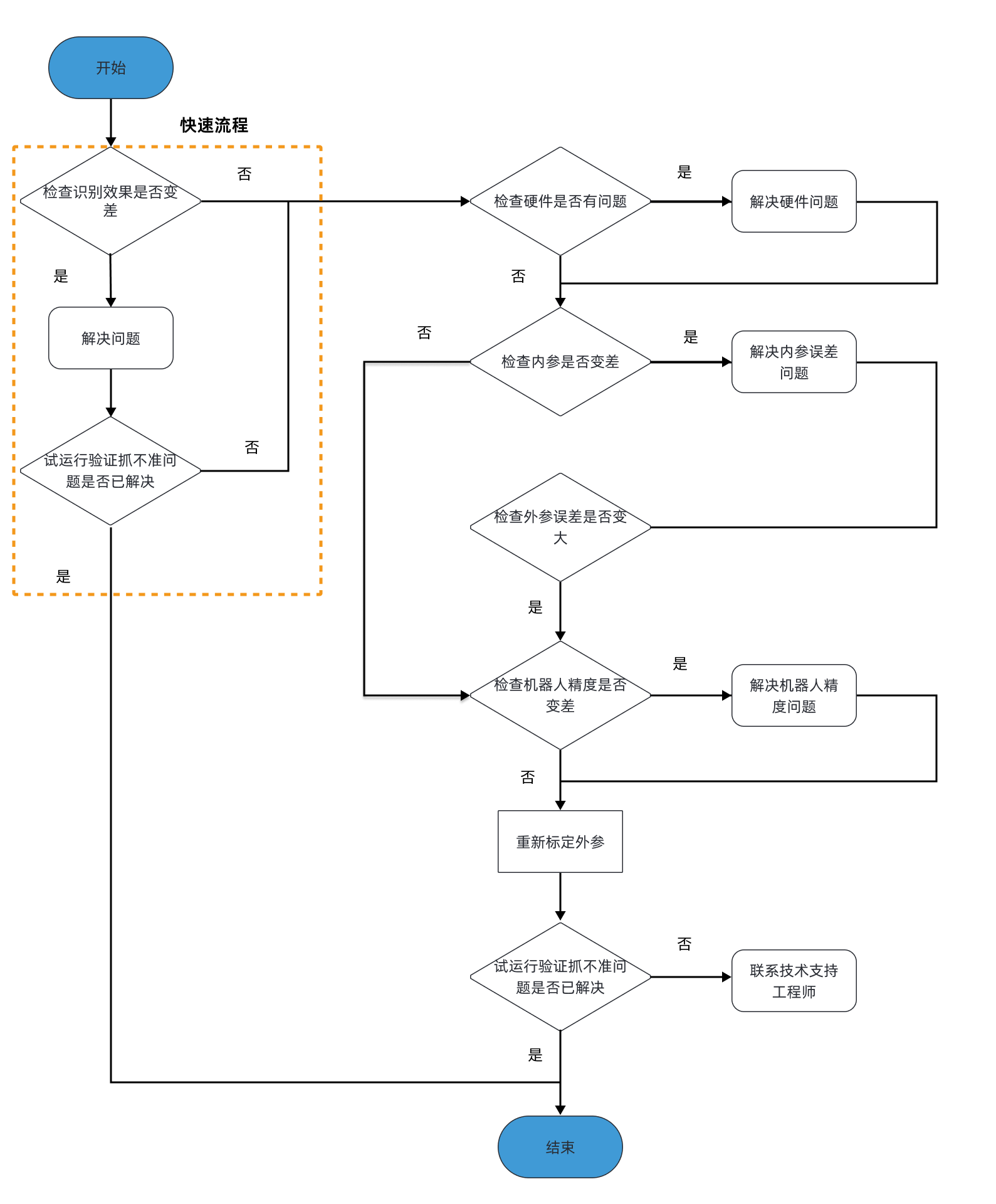
当出现机器人抓不准问题时,通常的抓不准问题排查思路如下图所示:
| 下文仅介绍抓不准问题排查的整体思路。各检查项的检查方法、标准以及误差校正方法请参见后续的操作指导章节。 |
快速流程
根据最可能影响抓取精度的因素,先检查识别效果是否变差(点云质量是否变差、深度学习推理效果是否降低(若项目使用深度学习)或3D匹配效果是否下降)。
-
如果是,立即定位问题原因并联系技术支持工程师解决,然后试运行验证抓不准问题是否已解决。
-
如果是,问题处理结束。
-
如果否,按照完整流程继续排查问题。
-
-
如果否,执行按照完整流程继续排查问题。
完整流程
如果按照以上快速流程确定视觉工程的识别效果没有变差,那么请按照如下流程继续排查:
-
-
如果是,先解决硬件问题,然后执行下一步。
-
如果否,执行下一步。
-
-
-
如果是,先进行内参校正,然后执行下一步。如果内参无法校正,请联系技术支持工程师解决。
-
如果否,执行下一步。
-
-
评估外参误差是否变大。然后执行下一步。
-
-
如果是,先处理机器人精度问题,然后再执行下一步。
-
如果否,执行下一步。
-
-
-
如果是,问题处理结束。
-
如果否,请联系技术支持工程师。
-