“点云预处理”常见问题
本节介绍“点云预处理”流程中的常见问题及其可能原因、解决方案。
点云质量差
-
问题现象
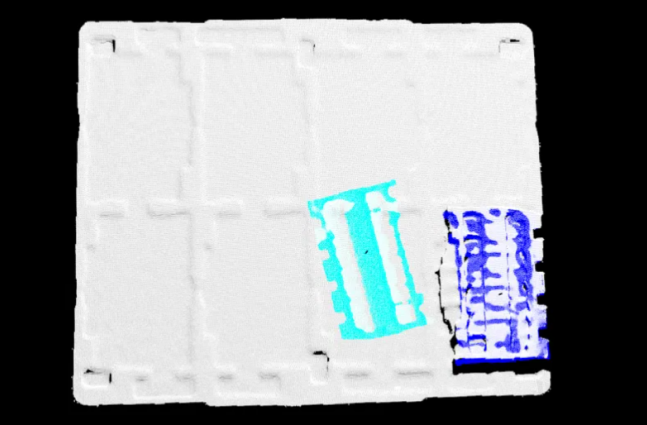
点云预处理后,点云质量较差。
-
可能原因
-
相机曝光相关参数设置不合理。
-
现场光照较强,干扰相机采集图像。
-
料筐侧壁反光,导致点云质量差。
-
-
解决方法
-
根据工件实际情况设置合理的相机曝光参数。对于高反光工件,建议在Mech-Eye Viewer中将激光的编码模式设置为反光物体。该参数位于专家、大师可见级别下。
-
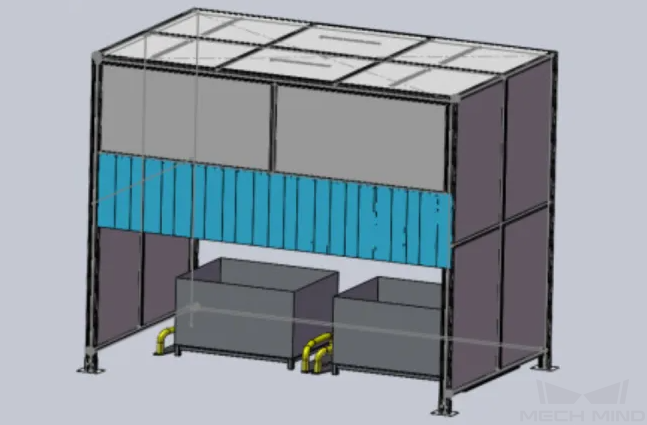
对工位进行遮光,避免强光直接照射工位。
-
推荐使用不反光的料筐,如侧壁镂空料筐。
-
背景点云未被去除
-
问题现象
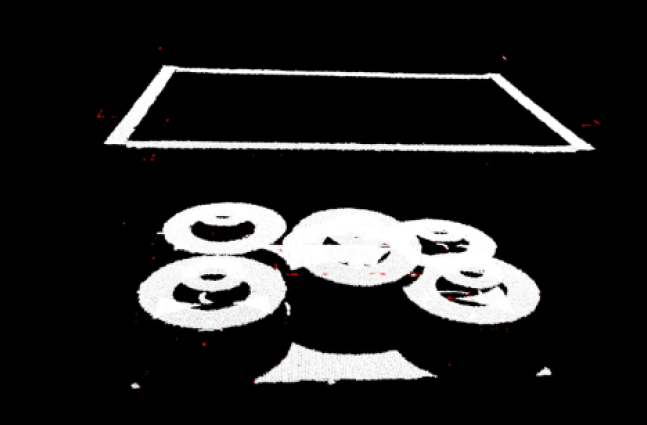
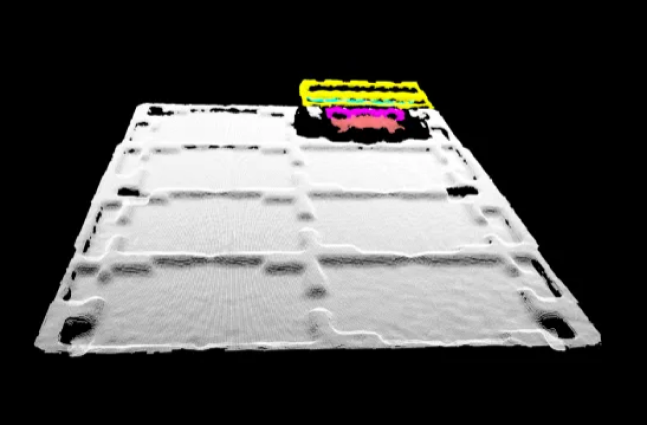
点云预处理后,背景点云未被去除,影响后续工件识别结果。如下图所示,背景点云被误识别为工件。
-
可能原因
点云预处理相关参数设置不合理,导致背景点云未被去除。
-
解决方法
-
适当调小“点过滤”分组中的法向与竖直方向最大夹角,用于去除工件和背景点云之间粘连的点云,同时需尽量保证工件自身点云完整。
-
调节“通过聚类去除噪声”分组下的参数。
参数 调节说明 聚类半径
一般保持默认即可。如果调大该值,可将更远距离的点云聚类为一簇点云,但可能导致步骤运行时间变长。
类的最小点数
该参数值应大于噪声点云点数,并小于工件点云点数。
类的最大点数
该参数值应大于工件点云点数。如果待去除的背景点云点数较多,可令该参数值小于背景点云点数。
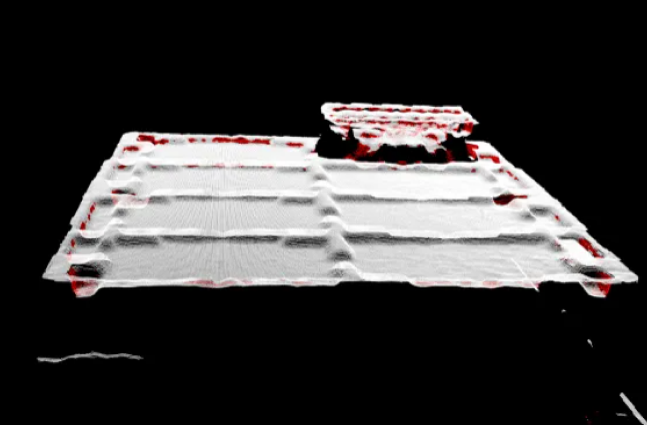
上述参数调节完成后,即可将背景点云去除,即下图中的白色点云。
如果无法通过点云聚类方式去除背景点云,可尝试在“工件选择与识别”流程中开启使用深度学习辅助识别功能。
-