机器人通信配置
视觉系统硬件搭建完成了视觉系统与机器人系统的硬件集成,机器人通信配置则是完成两者之间的通信集成,确保视觉系统与机器人侧能够实时且准确地交互数据。
机器人通信配置通常需要将梅卡曼德提供的通信程序和配置文件导入到机器人系统中,并完成相应的通信配置。
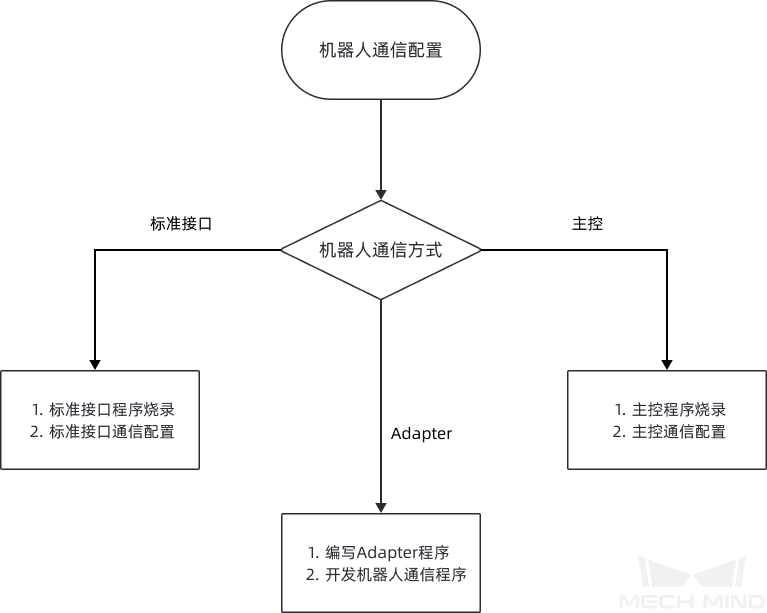
根据视觉方案设计阶段选择的机器人通信方式不同,本阶段完成的配置也存在差异。
-
如果在视觉方案设计阶段选择了标准接口通信方式,在本阶段,你需要将机器人标准接口程序及配置文件导入到机器人系统中,并完成标准接口通信相关的配置。
你可以按照机器人或PLC品牌在标准接口适配一览表中查找标准接口通信的帮助文档。
-
如果在视觉方案设计阶段选择了主控通信方式,在本阶段,你需要将机器人主控程序及配置文件烧录到机器人系统中,并完成主控通信相关的配置。
你可以按照机器人品牌在主控适配一览表中查找主控通信的帮助文档。
-
如果在视觉方案设计阶段选择了Adapter通信方式,在本阶段,你需要为视觉系统编写Adapter程序,并为机器人侧编写相应的机器人通信程序。
Adapter是一种定制化通信方式,因此对使用者有较高的编程能力要求。更多关于Adapter通信的介绍,请参考Adapter通信。