验证位姿重复精度
视觉工程搭建完成后,可以通过验证位姿重复精度来检查工程的稳定性。
验证方法
验证工程识别的重复精度需要使用Mech-Vision软件中的“通过统计数据检查位姿重复精度”步骤。
验证流程如下所示:
-
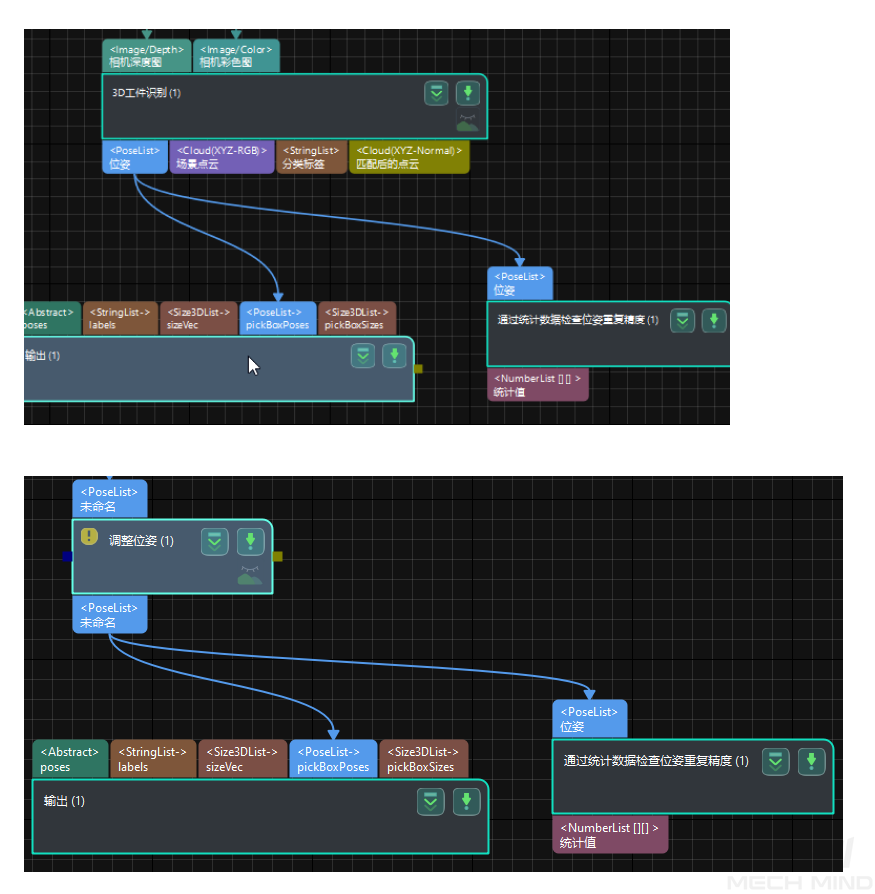
在工程中增加“通过统计数据检查位姿重复精度”步骤。
该步骤可以连接在输出目标物体位姿的步骤之后,如下图所示。
-
将单个工件放置在相机视野内,然后运行工程10到20次获取并统计该工件在该工程中输出的位姿,从而判断位姿的重复精度。
-
打开统计数据文件查看位姿重复精度值。
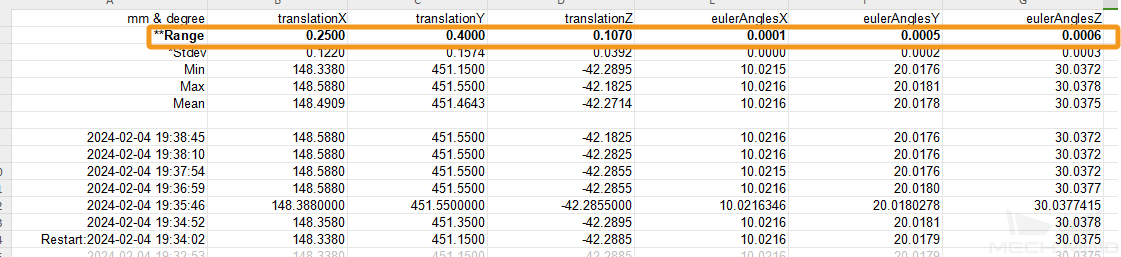
如上图所示,表格中range(范围误差或极差)这一行展示了工件在该位置的位姿重复精度:
-
x轴坐标的误差范围大约±0.25 mm。
-
y轴坐标的误差范围大约±0.40 mm。
-
z轴坐标的误差范围大约±0.11 mm。
-
-
如果抓取区域比较大,或者有些区域抓取效果不稳定,需要对同一工件在多个位置进行位姿重复精度统计。
对于深筐抓取的场景,需要在不同高度的不同位置进行位姿重复精度统计。例如,可以将料筐平面划分为九宫格一样的区域,然后在不同高度上做重复精度统计。 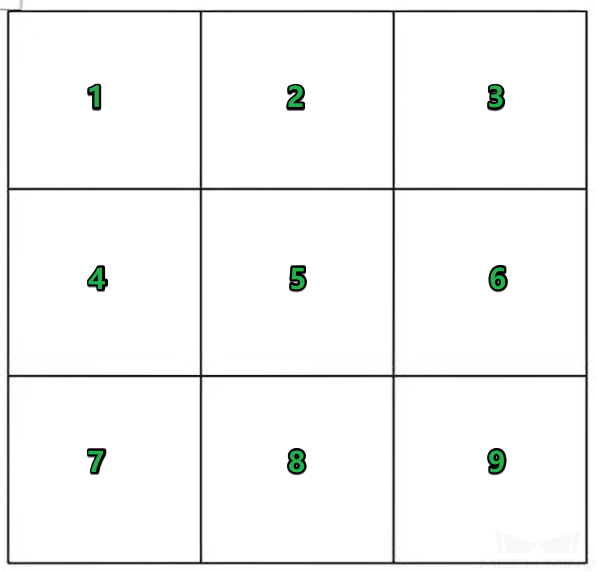
验证标准
通常,x/y/z轴坐标的误差范围在±0.5 mm以内即可满足项目的精度要求。
但对于高精度要求的场景,x/y/z轴坐标的误差范围应更小,例如±0.1 mm。如果统计得到的误差范围较大,请提升工程的识别精度。