检查机器人绝对精度是否变差
本文指导你快速检查机器人绝对精度是否变差。
Mech-Vision提供机器人绝对精度检查工具,方便你快速排查机器人绝对精度问题。
在菜单栏中选择,然后在误差分析界面选择。
检查机器人零点丢失
检查方法:
将机器人恢复标准零点姿态时,检查各轴上的刻度线是否对齐。
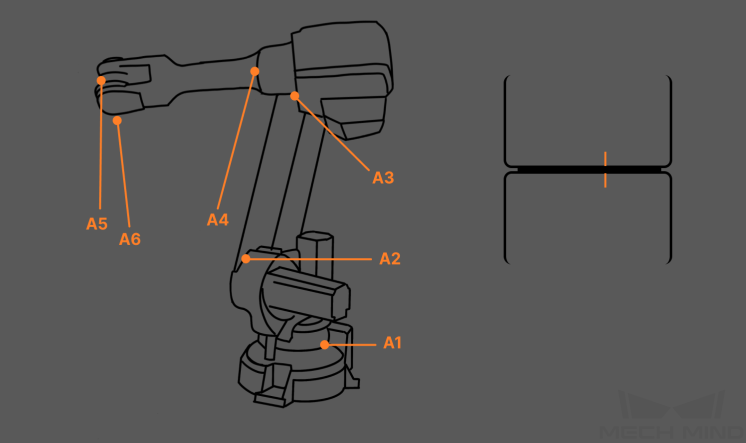
检查标准:
-
在零刻度线没有过大偏差时,可以进一步检查示教器内该数值和出厂数值的一致性。
-
如果刻度线明显对不齐,则机器人零点丢失,需要重新标定。
标定零点:
请参考机器人的用户手册标定零点或者联系机器人厂家获取零点标定的支持。
检查移动距离误差是否变大
在工作区域内使用示教器控制机器人沿固定方向(例如 X、Y 方向)移动一段距离,移动完成后将该距离与机器人实际移动距离进行对比并测量差值。
检查方法:
-
XYZ三个轴以及对角线上各取两个点,从示教器上读出机器人移动距离D,尺子实测距离D',对比差值。
-
建议XYZ三个方向及不同位置都测一遍。
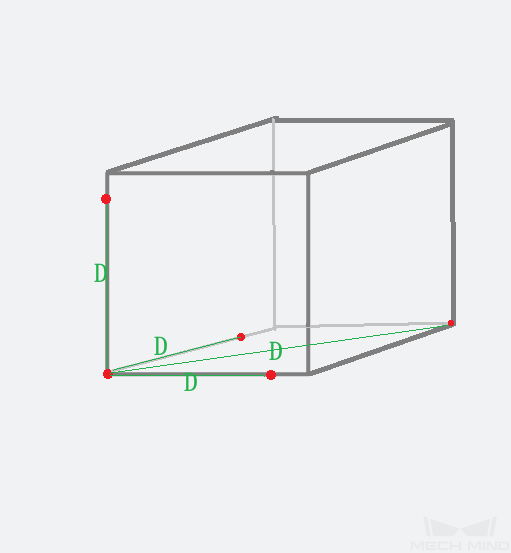
检查标准:
总体差值越小,移动距离误差越小,机器人绝对精度越高。
将移动距离误差值与应用部署阶段记录的移动距离误差值进行对比。
-
如果误差值没有明显增加,则说明机器人绝对精度可用。请按照抓不准问题排查思路继续排查。
-
如果误差值增大,则说明机器人绝对精度变差,机器人精度误差是导致抓不准问题的主要误差源之一。请联系机器人厂商校准机器人绝对精度。