提升和验证外参精度
本节介绍如何提升和验证外参精度。
提升外参精度
在手眼标定阶段,你可以采取如下措施提升外参(标定结果)精度:
标定前:
-
确保机器人底座安装牢固。
-
确保相机内参的精度较高。建议使用标定板在不同区域不同高度进行内参检查。
-
确保已进行机器人绝对精度检查,且机器人精度满足项目要求。
-
推荐在标定前相机预热暖机至少30分钟;对于高精度应用建议暖机45分钟以上。预热暖机过程可以通过相机通电或者连续拍照的方式进行。
标定时:
-
当ETH场景下使用“标定板多个随机位姿”方法进行标定时,确保标定板安装牢固。
-
如果机器人抓取时带有很重的夹具,建议机器人端开启负载补偿,并带夹具标定外参。
-
如果相机工作距离超过了1.5米,需要为标定使用的“calib”参数组开启表面平滑功能。
-
请降低机器人速度并设置较长的等待时间,避免采集标定数据时机器人抖动明显。
-
严格按照手眼标定流程进行标定操作。
查看外参标定结果
验证外参精度
ETH场景中验证标定结果
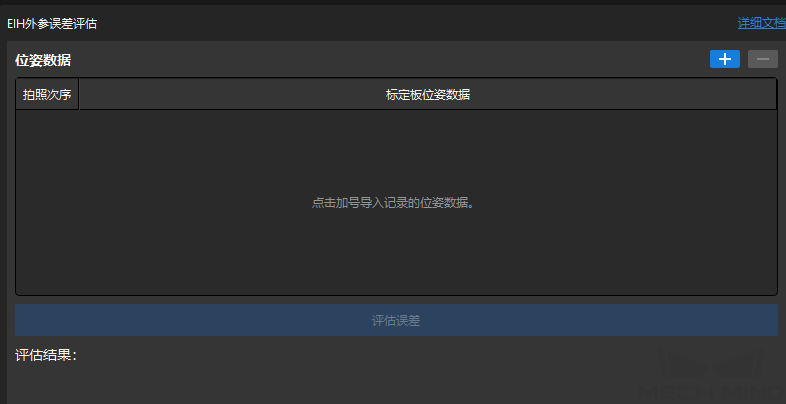
计算外参后,可以使用“ETH外参误差评估”工具评估标定结果是否可用。
具体操作过程如下:
-
在计算外参步骤中,单击辅助工具中的外参精度,然后在弹出的误差分析界面选择ETH外参误差评估。
-
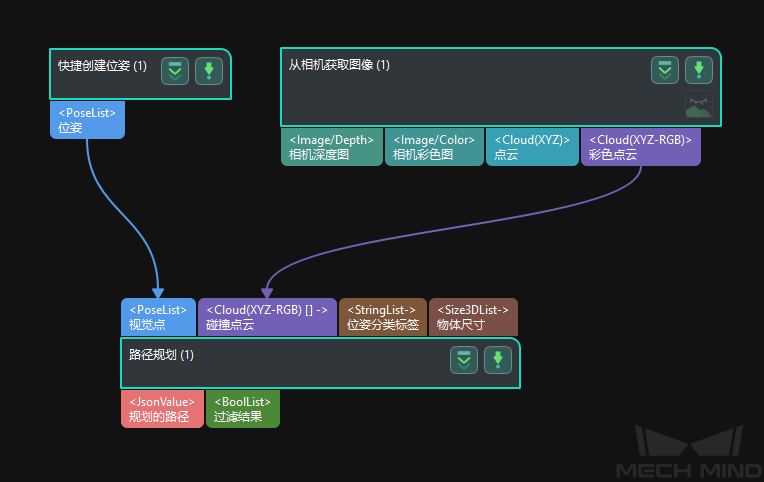
搭建新工程,用于获取标定板位姿。需要搭建的工程如下图所示:
-
同步机器人位姿,获取包含标定板点云的场景点云。
-
选择工程中的“路径规划”步骤,然后在步骤参数面板单击打开编辑器按钮以打开三维仿真空间。
-
将真实机器人位姿同步至“路径规划”工具中,以保证仿真界面中机器人与真实机器人位姿相同。
-
单击仿真按钮,可将含有标定板的场景点云进行可视化显示(单击仿真后的相关报错信息可忽略)。
-
-
创建标定板的虚拟TCP。
-
在“路径规划工具”的资源列表中添加末端工具。
-
在三维仿真空间中观察末端工具的显示,调整参数使TCP与标定板圆心重合(位姿的X、Y 轴与圆心十字重合,XOY平面与标定板平面重合)。
-
输入名称后单击确定,完成虚拟TCP创建。
-
-
工作区域内其他位置外参评估。
-
操作真实机器人至工作区域其他位置。
-
将真实机器人位姿同步至“路径规划”工具中,以保证仿真界面中机器人与真实机器人位姿相同。
-
单击仿真按钮,获取新的标定板和场景点云。
-
观察上一步中添加的虚拟TCP与标定板圆心是否重合。
-
如果虚拟TCP与标定板圆心基本重合,则说明标定结果可用。