카메라를 사용하기
이 부분에서는 개봉 검사부터 Mech-Eye Viewer를 사용하여 이미지를 캡처하는 등 일련의 작업을 완료하는 방법을 소개합니다.
|
다이어그램은 설명 목적으로만 제공됩니다. 실제 상품은 다를 수 있습니다. |
1. 개봉 검사
-
카메라 패키지를 받은 후, 패키지가 완전하고 파손되지 않았는지 확인하세요.
-
“패키지 리스트”를 참조하여 제품 및 부품이 누락되거나 손상되지 않았는지 확인하세요.
| 아래 표는 참고용이며, 실제 패키지에 있는 <패키지 리스트>를 참조하세요. |
|
|
|
|
|
|
|
|
|
|
M4 × 8 소켓 헤드 캡 나사 |
M5 × 8 소켓 헤드 캡 나사 |
M8 × 20 소켓 헤드 캡 볼트 |
M8 × 20 T-볼트 |
|
|
M8 너트 |
M8 플랜지 너트 |
|
|
M8 와셔 |
Ø6 × 10 맞춤핀 |
케이블 타이 마운트, 1개 |
케이블 타이, 50개 |
|
|
육각 렌치, 3개 |
캘리브레이션 보드(UHP-140-GL만) |
|
|
|
카메라 패키지 외에도 다음과 같은 옵션 액세서리(구매한 경우)도 받을 수 있습니다.
|
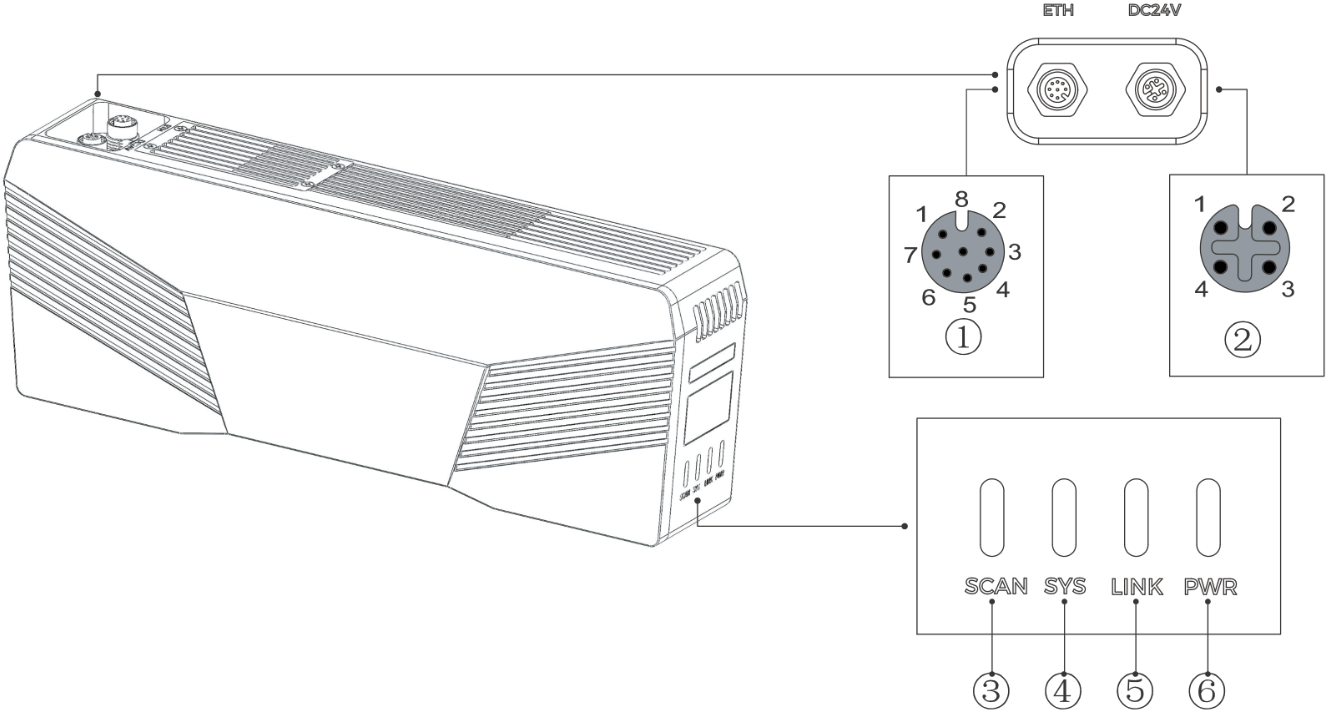
2. 포트 및 표시등 확인
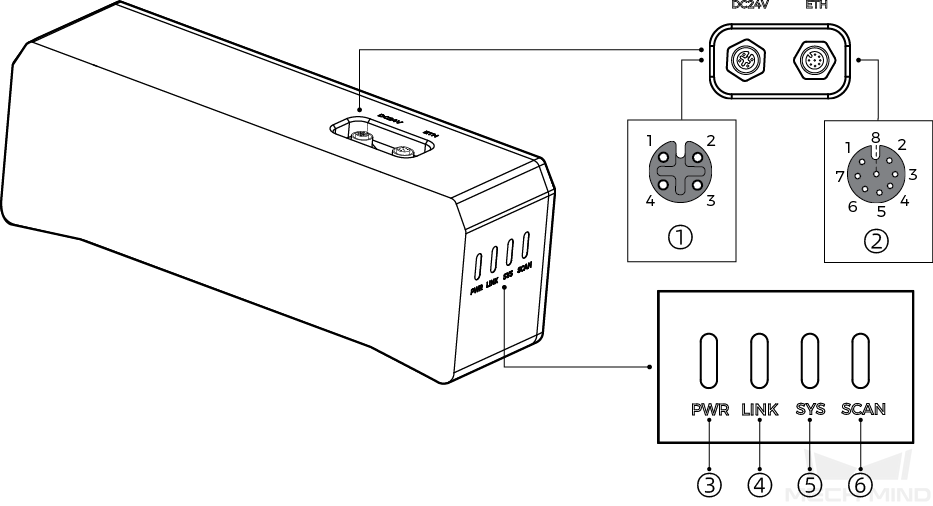
아래 그림 및 표를 참조하여 카메라의 각 포트 및 표시등의 기능을 확인합니다.
2.1. DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL 및 UHP-140-GL
번호 |
명칭 |
기능 |
|
|---|---|---|---|
① |
DC 24V 전원 포트 |
1: GND |
3: 24V DC |
2: GND |
4: 24V DC |
||
② |
ETH 네트워크 포트 |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
③ |
PWR 표시등 |
꺼짐: 전원에 연결되어 있지 않음 |
|
녹색 점등: 정상 전압 |
|||
노란색 점등: 전압 16V 미만 또는 28V 이상 |
|||
빨간색 점등: 전압 12V 미만 |
|||
④ |
LINK 표시등 |
꺼짐: 네트워크에 연결되어 있지 않음 |
|
녹색 점등 또는 깜박임: 네트워크 연결됨 |
|||
⑤ |
SYS 표시등 |
꺼짐: 시작되지 않음 |
|
녹색 점등: 시작 중 |
|||
녹색 깜박임: 정상적으로 실행 중 |
|||
노란색 깜박임: 전압이 불안정하거나 온도가 비정상임 |
|||
빨간색 깜박임: 심각한 오류 |
|||
⑥ |
SCAN 표시등 |
녹색 점등: 데이터 획득 및 처리 중 |
|
꺼짐: 데이터를 획득하거나 처리하지 않음 |
|||
2.2. NANO-GL 및 NANO ULTRA-GL
|
위 그림의 카메라는 NANO-GL입니다. |
번호 |
명칭 |
기능 |
|
|---|---|---|---|
① |
PWR 표시등 |
꺼짐: 전원에 연결되어 있지 않음 |
|
녹색 점등: 정상 전압 |
|||
② |
LINK 표시등 |
꺼짐: 네트워크에 연결되어 있지 않음 |
|
녹색 점등 또는 깜박임: 네트워크 연결됨 |
|||
③ |
ETH 네트워크 포트 |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
④ |
DC 24V 전원 포트 |
1: GND |
3: 24V DC |
2: GND |
4: 24V DC |
||
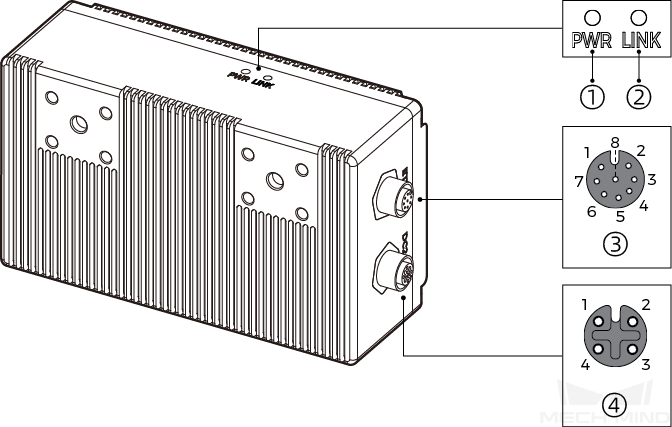
2.3. ULTRA M-GL
번호 |
명칭 |
기능 |
|
|---|---|---|---|
① |
ETH 네트워크 포트 |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
② |
DC 24V 전원 포트 |
1: GND |
3: 24V DC |
2: GND |
4: 24V DC |
||
③ |
SCAN 표시등 |
녹색 점등: 데이터 획득 및 처리 중 |
|
꺼짐: 데이터를 획득하거나 처리하지 않음 |
|||
④ |
SYS 표시등 |
꺼짐: 시작되지 않음 |
|
녹색 점등: 시작 중 |
|||
녹색 깜박임: 정상적으로 실행 중 |
|||
황색 깜박임: 온도 이상 또는 팬 상태 이상 |
|||
빨간색 깜박임: 심각한 오류 |
|||
⑤ |
LINK 표시등 |
꺼짐: 네트워크에 연결되어 있지 않음 |
|
녹색 점등 또는 깜박임: 네트워크 연결됨 |
|||
⑥ |
PWR 표시등 |
꺼짐: 전원에 연결되어 있지 않음 |
|
녹색 점등: 정상 전압 |
|||
노란색 점등: 전압 20V 미만 또는 28V 이상 |
|||
3. 카메라 설치하기
다음과 같은 방식으로 카메라를 설치할 수 있습니다.
| 설치 방식 | 요구 사항 |
|---|---|
로봇 플랜지에 장착되어 로봇과 함께 이동합니다. 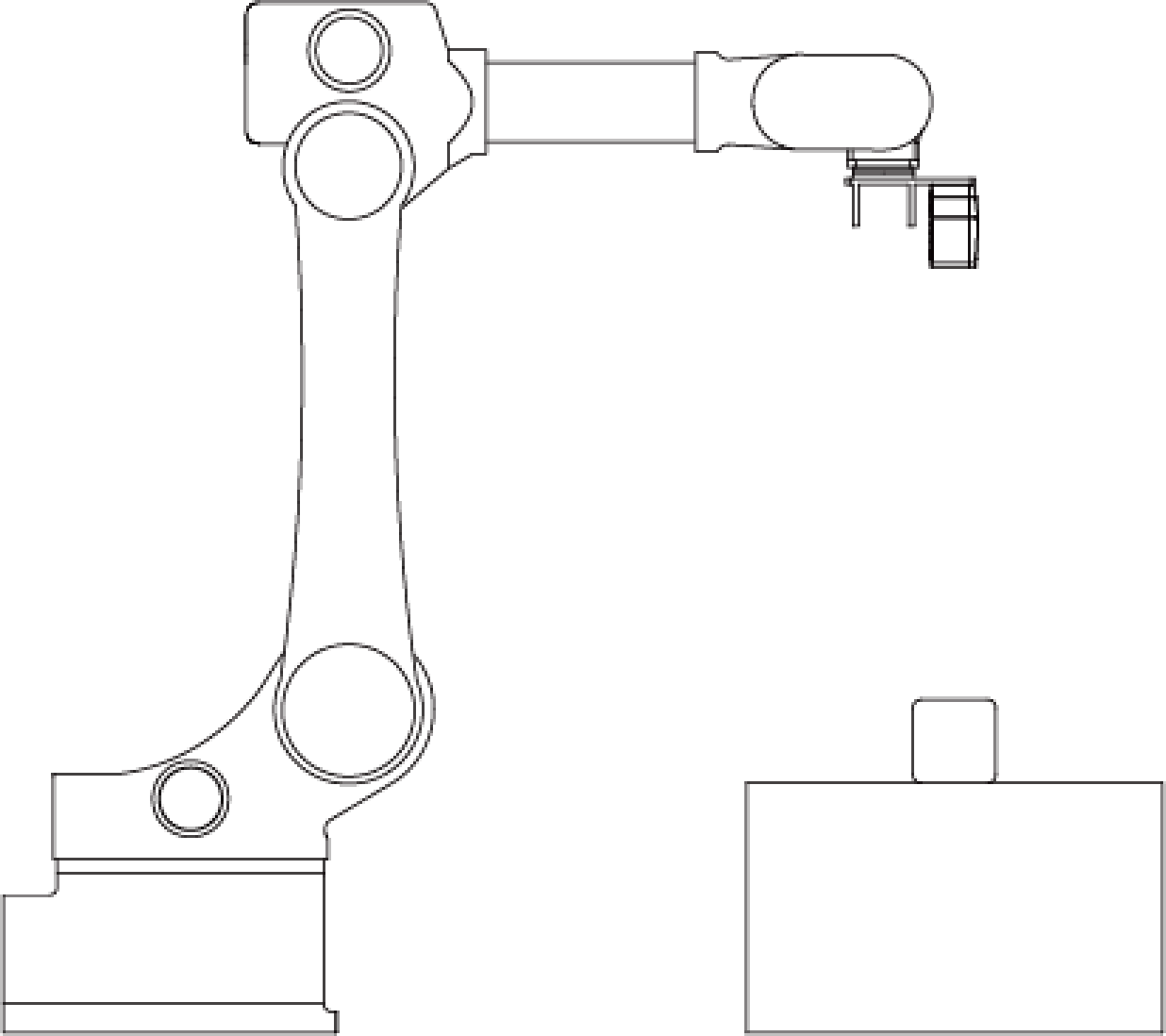
|
|
카메라는 프레임에 고정되며, 로봇과 함께 이동하지 않습니다. 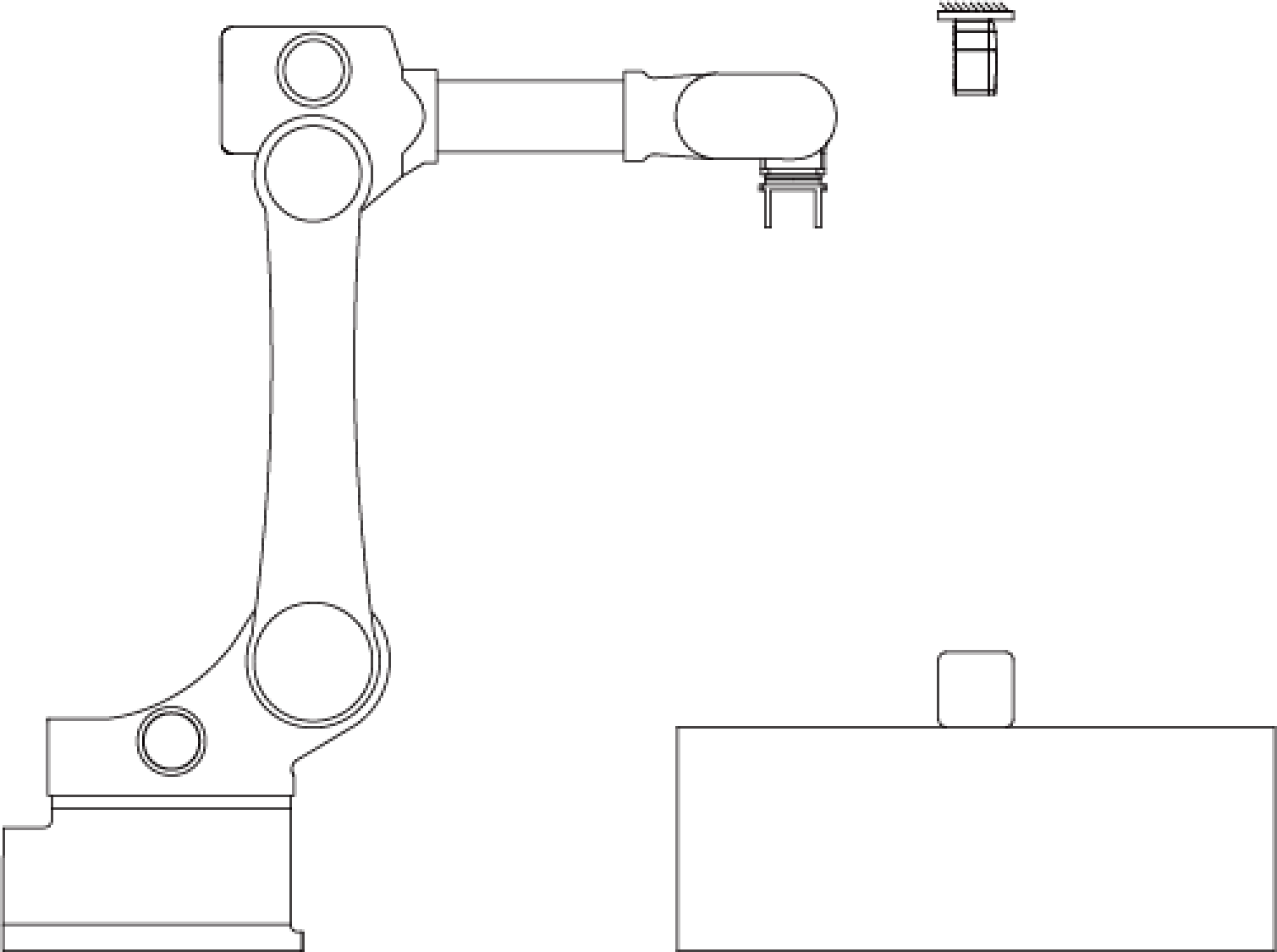
|
|
슬라이드 레일에 장착되어 슬라이드 레일과 함께 이동합니다. 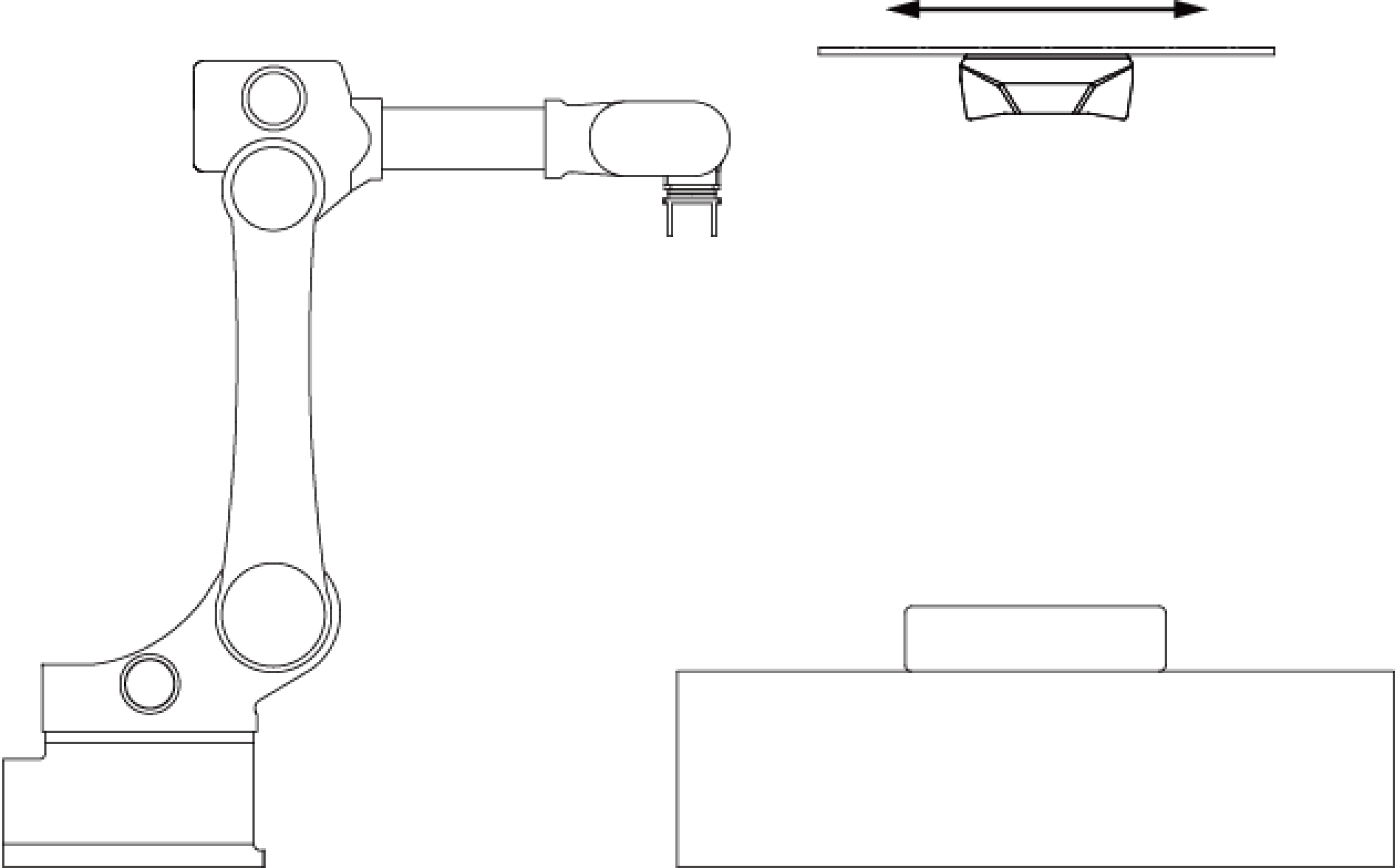
|
|
|
장착 방식을 결정한 후, 다음 섹션의 내용을 참고하여 브라켓 또는 나사홀을 통해 카메라를 장착 표면에 고정하세요.
|
3.1. 카메라 브라켓을 사용하여 설치하기
카메라 브라켓을 사용하면 다음과 같은 유형의 장착 표면에 카메라를 안정적으로 설치할 수 있습니다.
-
T-슬롯 알루미늄 프로파일
-
장착 구멍이 뚫린 설치면
|
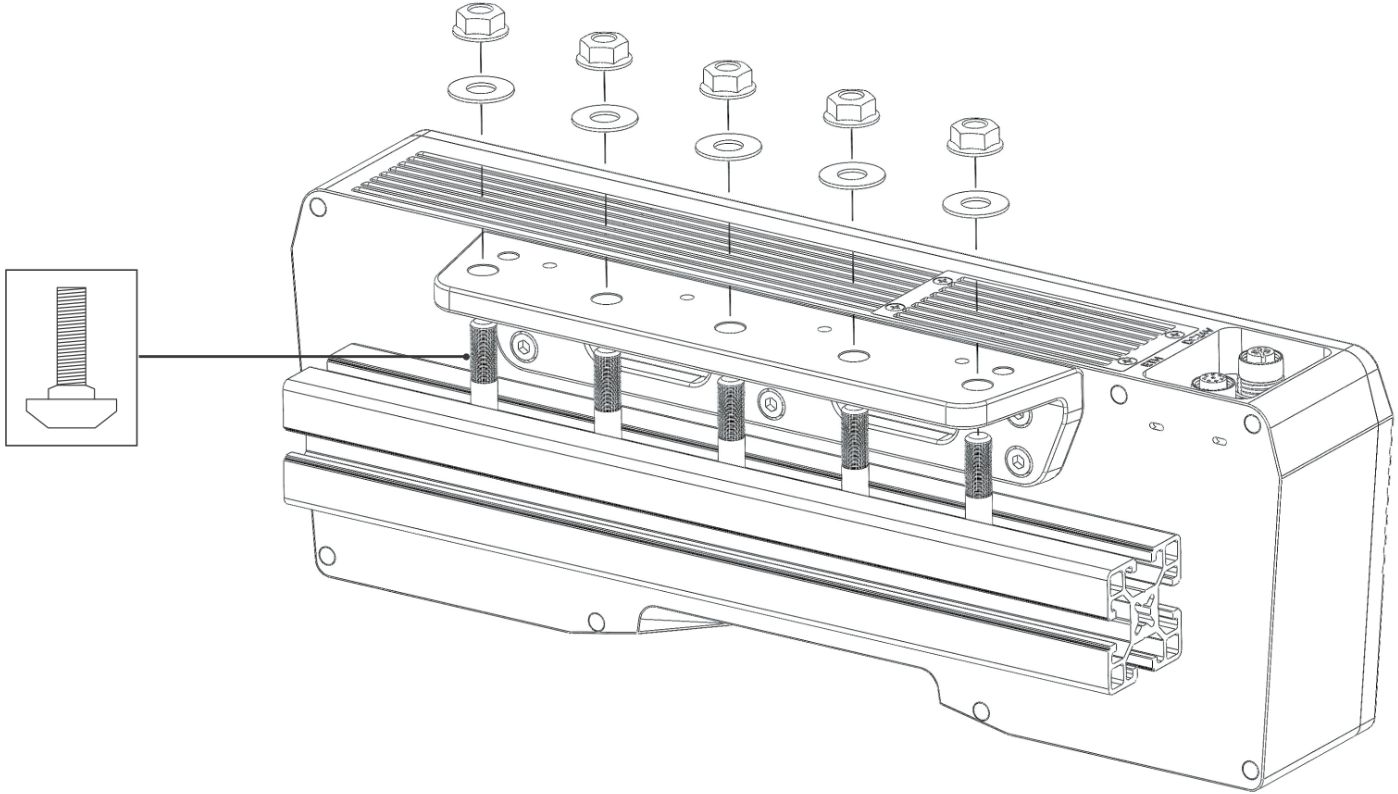
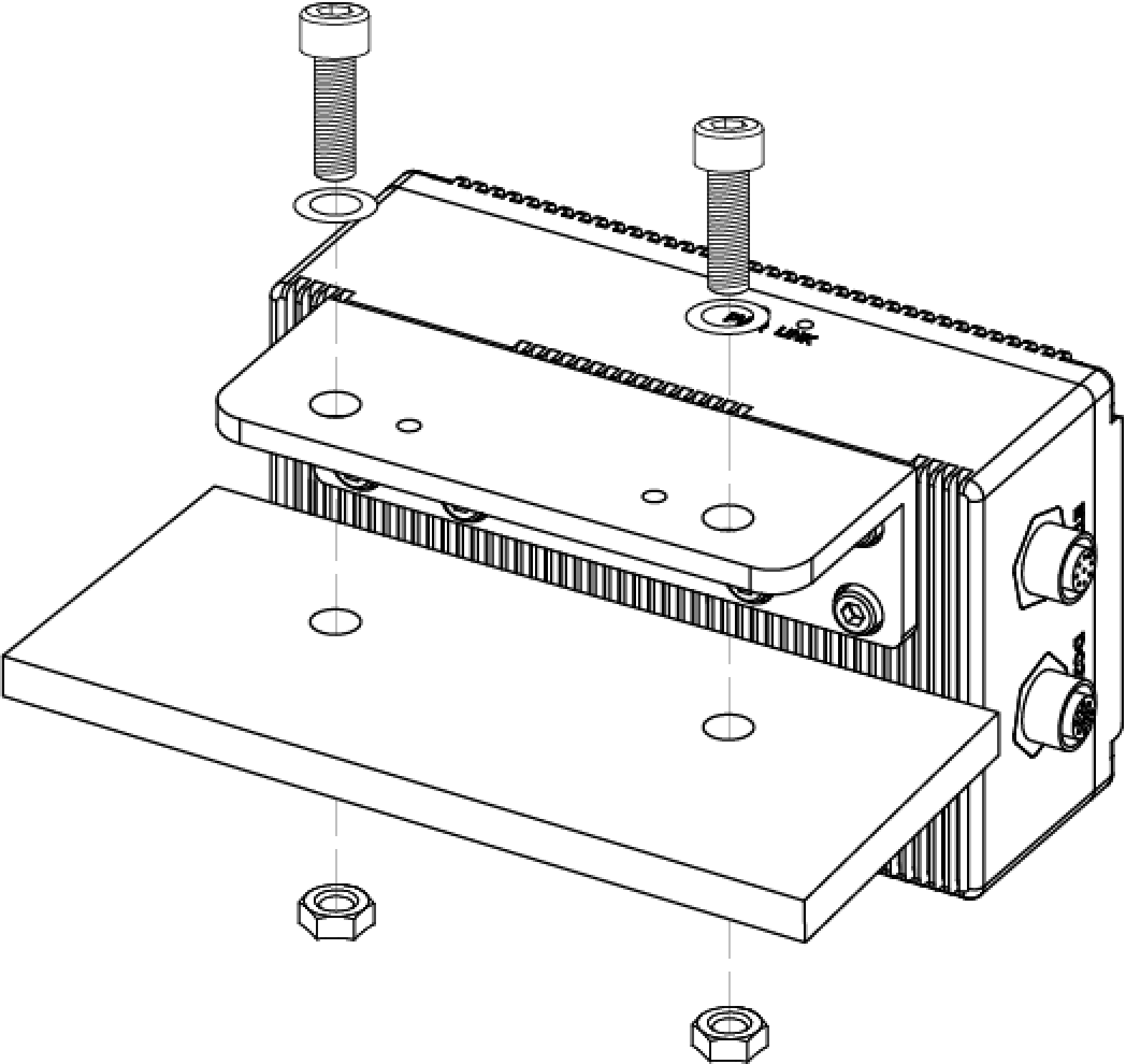
3.1.1. T-슬롯 알루미늄 프로파일에 장착
아래에 표시된 대로 M8 와셔 와 M8 × 20 T-볼트를 준비한 후, 오픈 육각 렌치를 사용하여 플랜지 너트를 단단히 조입니다. 조일 때 토크의 권장값은 12~13N·m입니다.
|
필요한 부속품의 수는 모델마다 다릅니다. |
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL 및 UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
-
ULTRA M-GL:
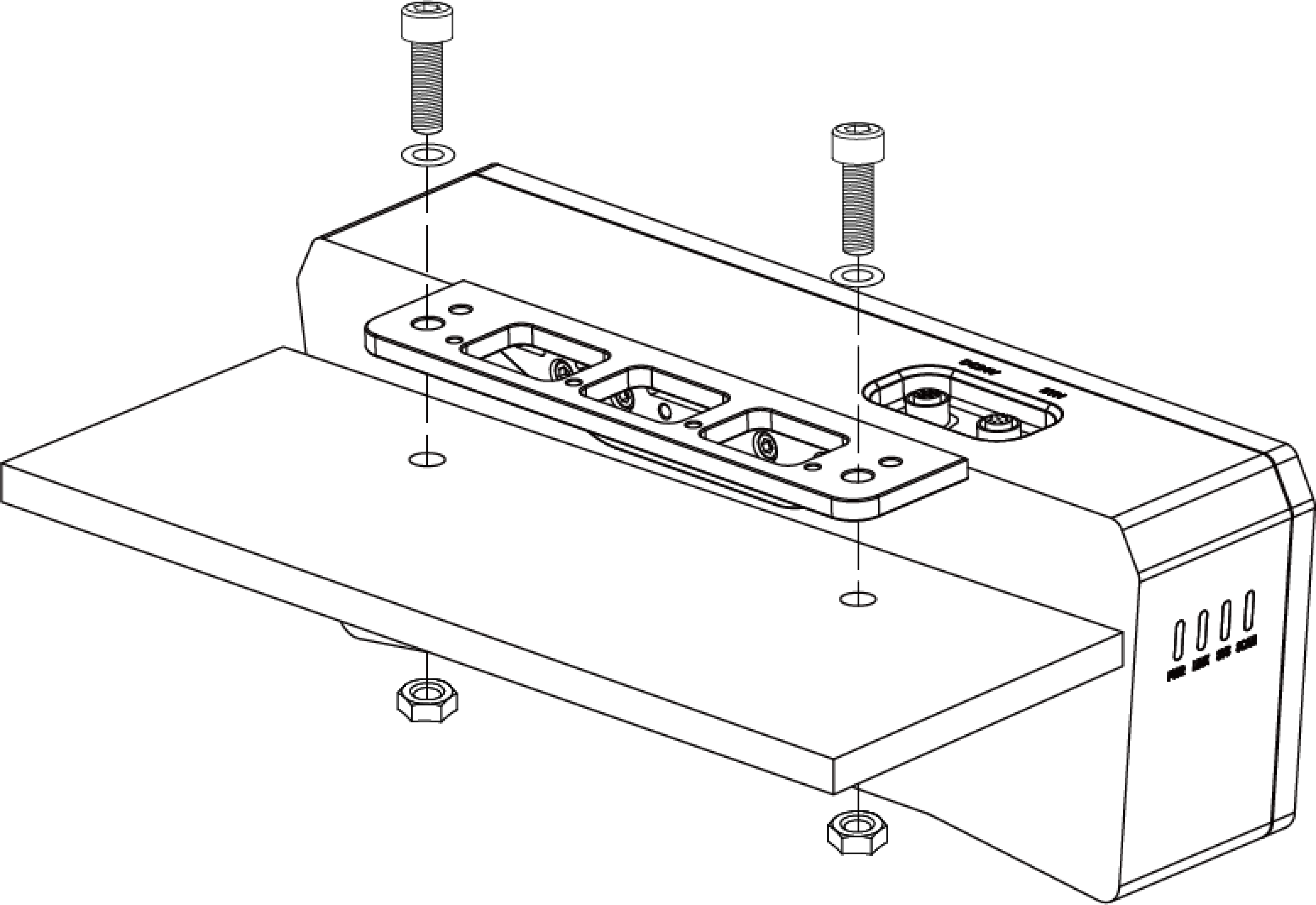
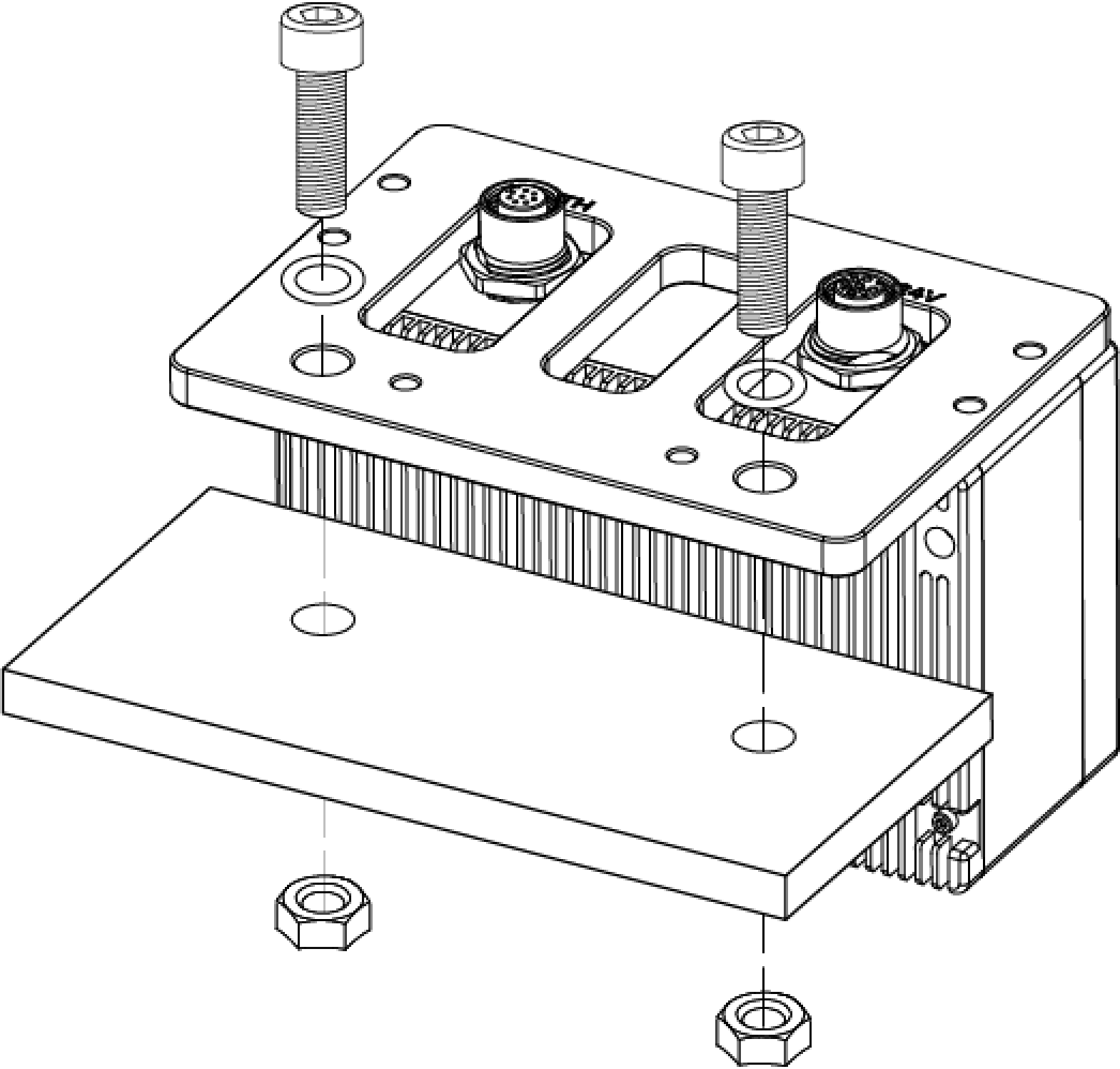
3.1.2. 장착 구멍이 뚫린 장착면에 설치
아래에 표시된 대로 M8 와셔 와 M8 × 20 소켓 헤드 캡 볼트를 준비한 후, 오픈 육각 렌치를 사용하여 너트를 단단히 조입니다. 조일 때 토크의 권장값은 12~13N·m입니다.
|
필요한 부속품의 수는 모델마다 다릅니다. |
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL 및 UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
-
ULTRA M-GL:
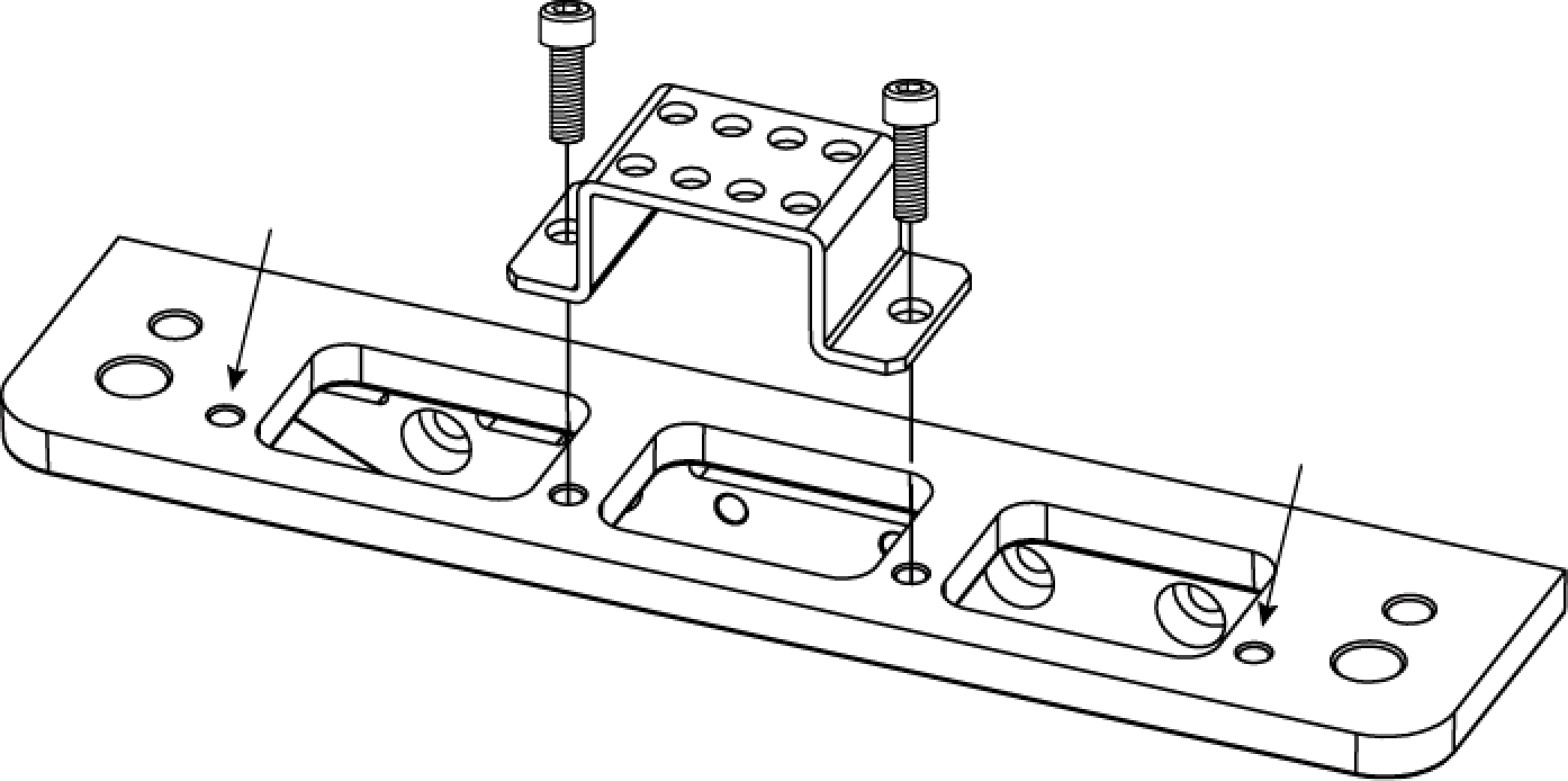
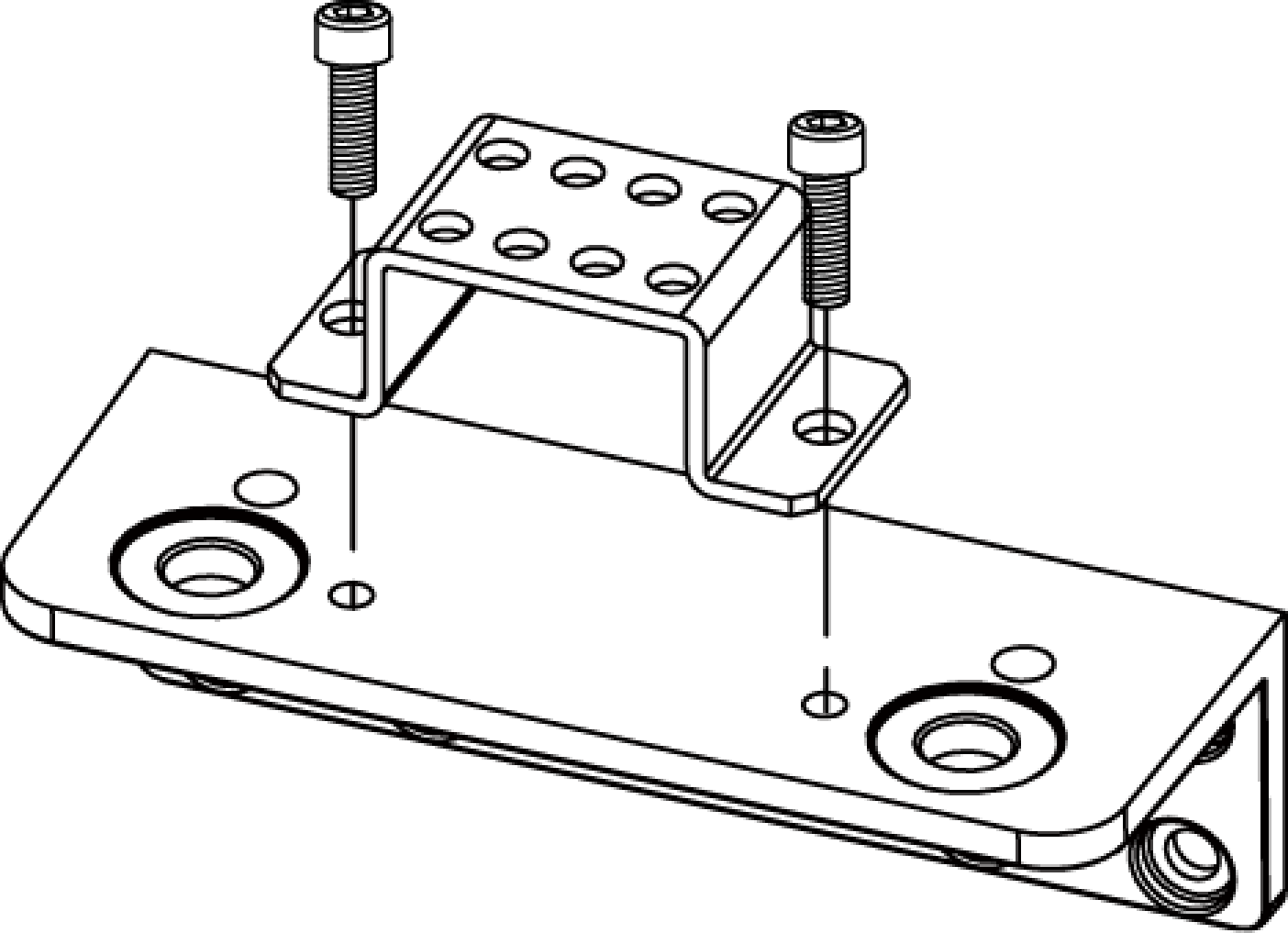
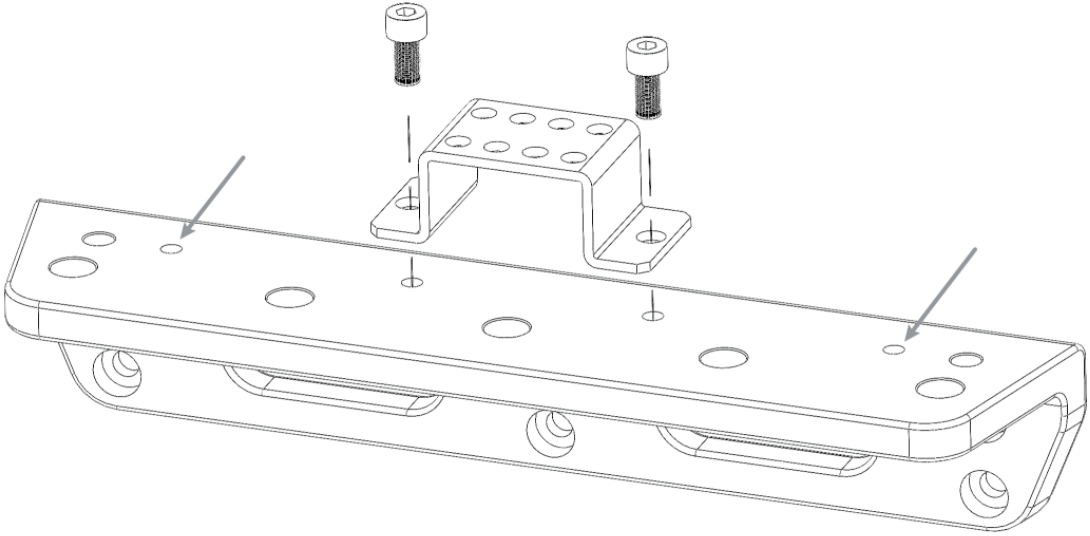
3.1.3. 브라켓에 케이블 타이 마운트 설치
케이블 타이 마운트를 장착한 후, 케이블이 늘어져 손상되는 것을 방지하기 위해 케이블 타이로 케이블을 고정할 수 있습니다.
아래에 표시된 대로 육각 렌치를 사용하여 M5 × 8 소켓 헤드 캡 나사 2개를 조입니다. 조일 때 토크의 권장값은 2.2~2.5N·m입니다.
-
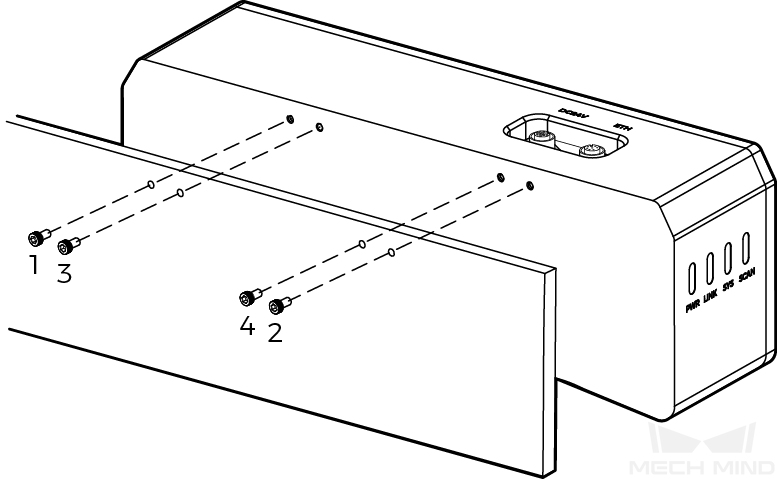
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL 및 UHP-140-GL : 아래 그림에 화살표로 표시된 나사 구멍을 이용해 케이블 타이 마운트를 설치할 수 있습니다.
-
NANO-GL:
-
NANO ULTRA-GL:
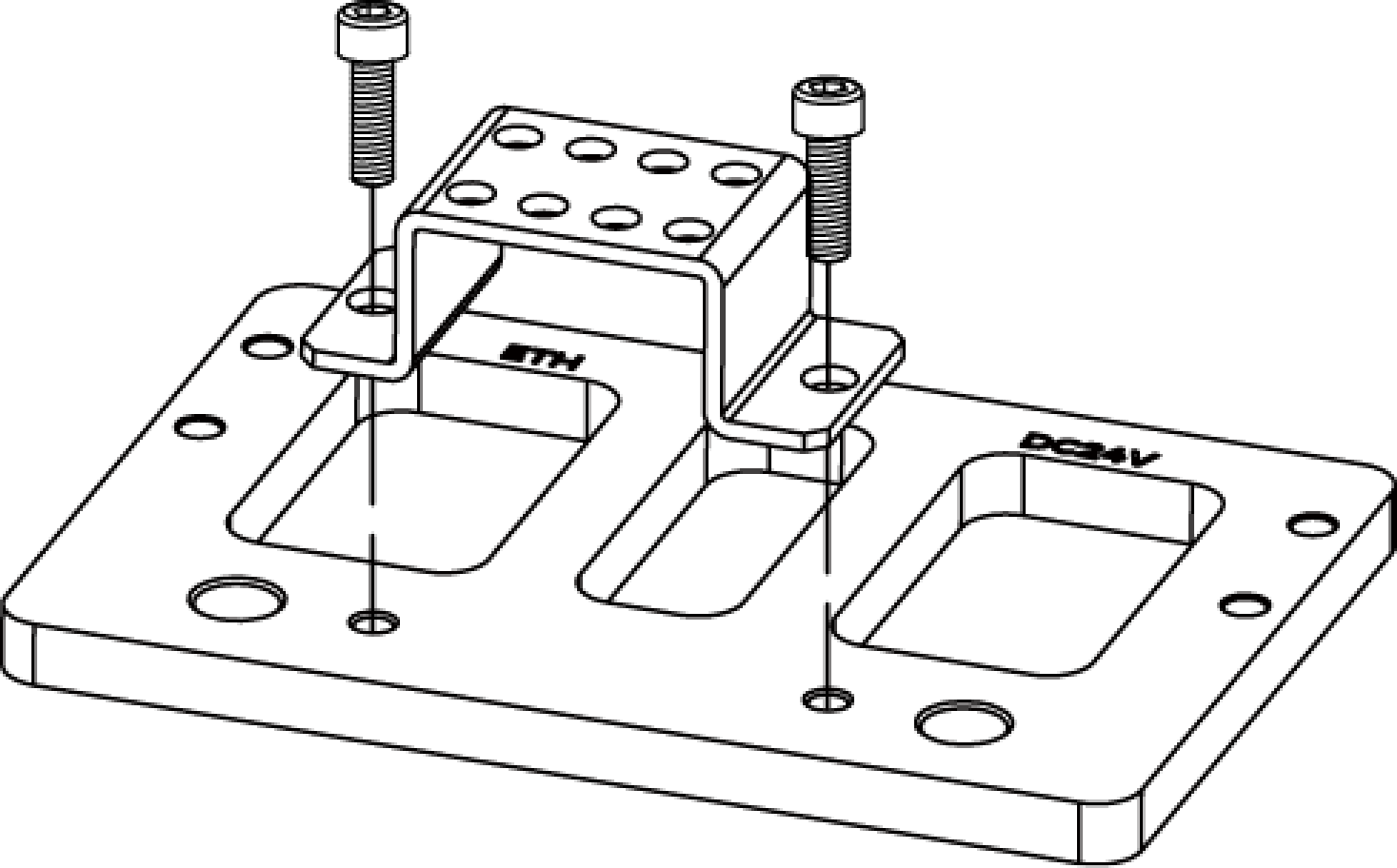
-
ULTRA M-GL: 아래 그림에 화살표로 표시된 스크류 구멍을 이용해 케이블 타이 마운트를 설치할 수 있습니다.
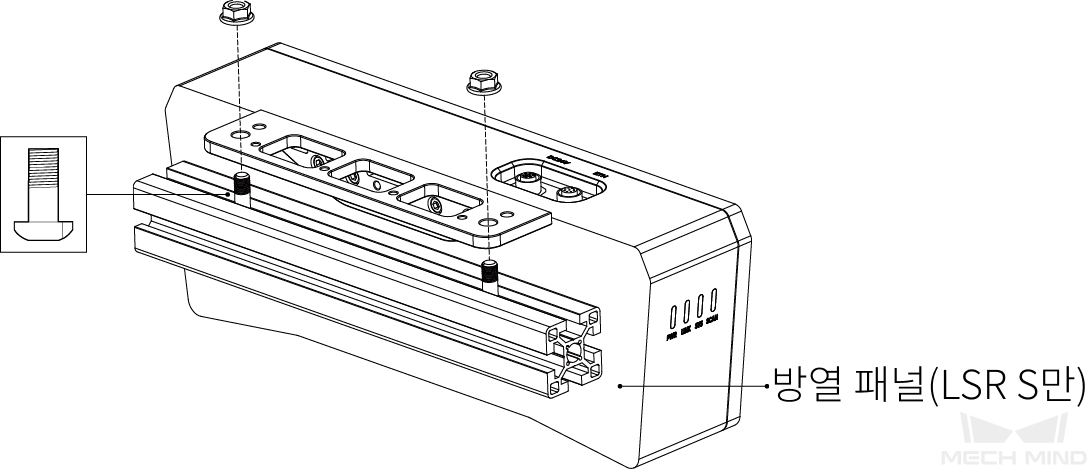
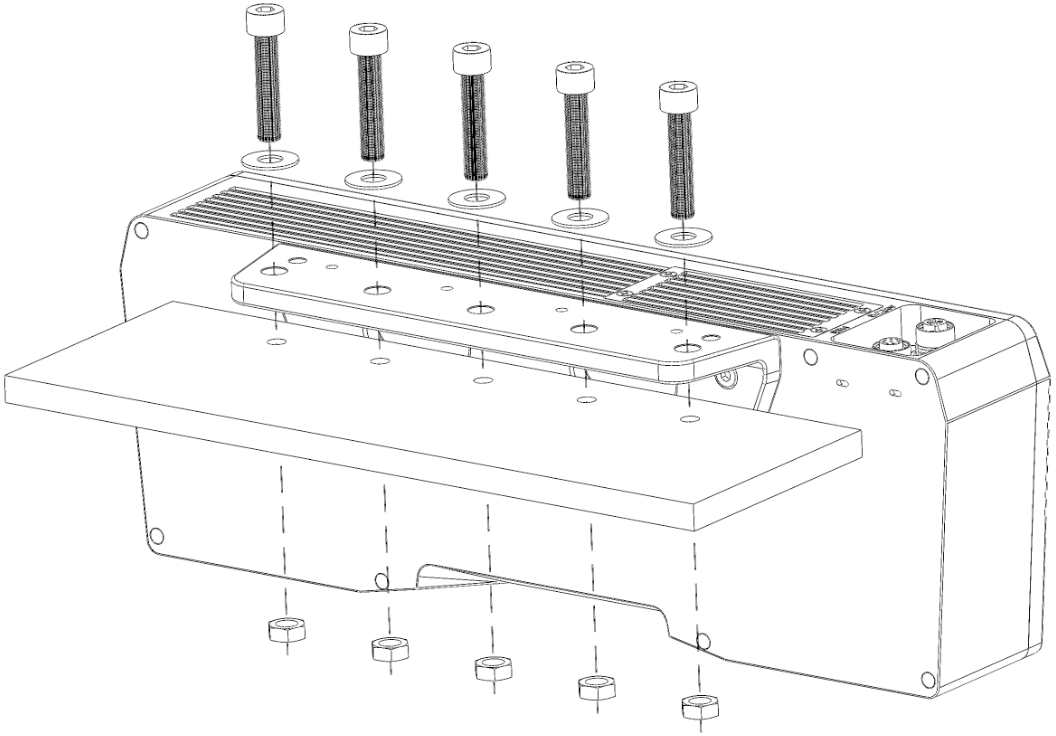
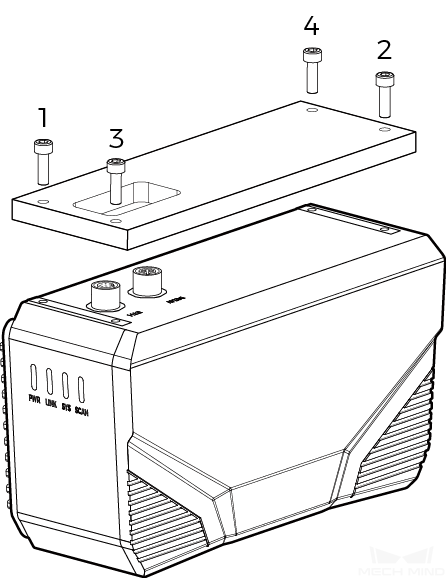
3.2. 카메라 뒷면 나사 구멍을 통해 설치하기
|
이 설치 방법을 사용하여 LSR S-GL 및 NANO ULTRA-GL 카메라를 설치할 경우, 열 방출 불량으로 인한 비정상적인 작동을 방지하기 위해 카메라 뒷면을 금속 방열 표면 가까이에 설치해야 합니다. |
-
육각 렌치를 사용하여 카메라 브라켓을 제거합니다. LSR S-GL 및 NANO ULTRA-GL 카메라를 사용하는 경우, 방열판도 제거해야 합니다.
-
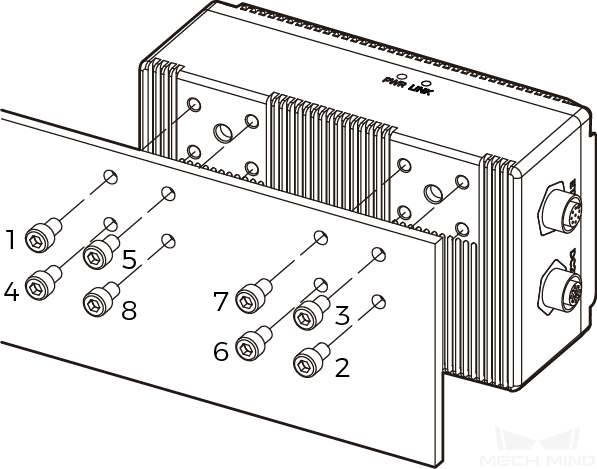
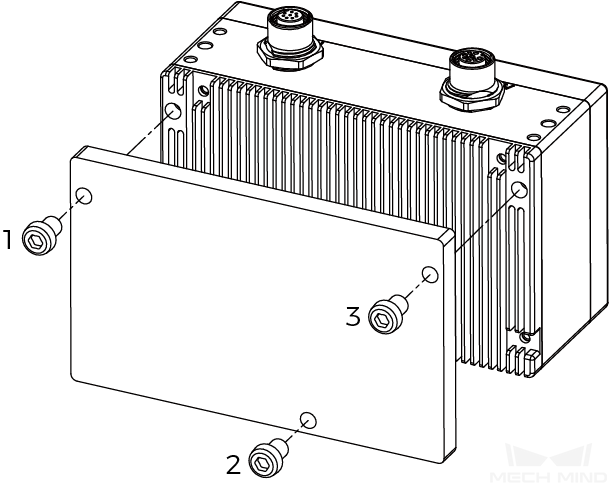
아래에 표시된 대로 해당 사양의 소켓 헤드 캡 나사를 장착 홀에 넣습니다. 그런 다음 육각 렌치를 사용하여 지정된 순서대로 나사를 느슨하게 조인 후, 모든 나사를 지정된 순서대로 단단히 조입니다.
-
NANO ULTRA-GL: M4 × 8 소켓 헤드 캡 나사(권장 조임 토크: 1.4~1.6N·m)
-
기타 모델: M5 × 8 소켓 헤드 캡 나사(권장 조임 토크: 2.2~2.5N·m)
필요한 나사의 수는 모델마다 다릅니다.
-
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL 및 UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
-
ULTRA M-GL:
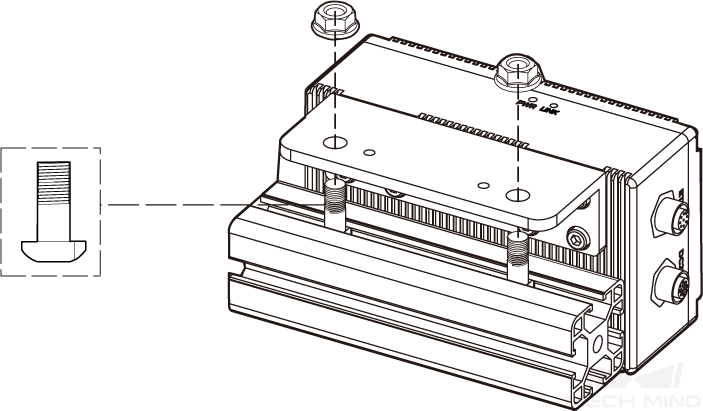
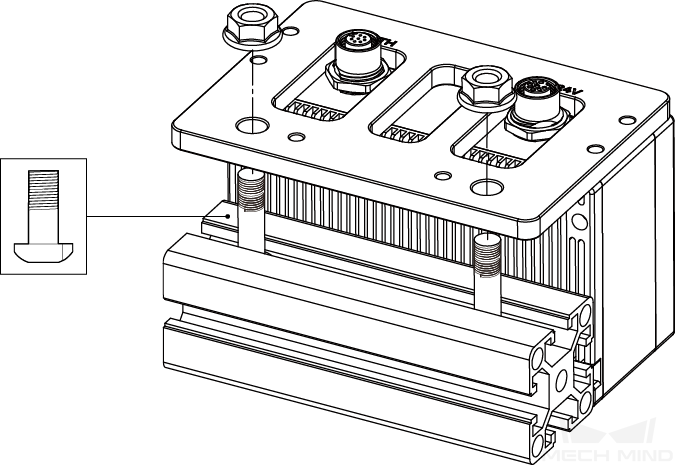
3.3. 카메라 상단 나사 구멍을 통해 설치하기
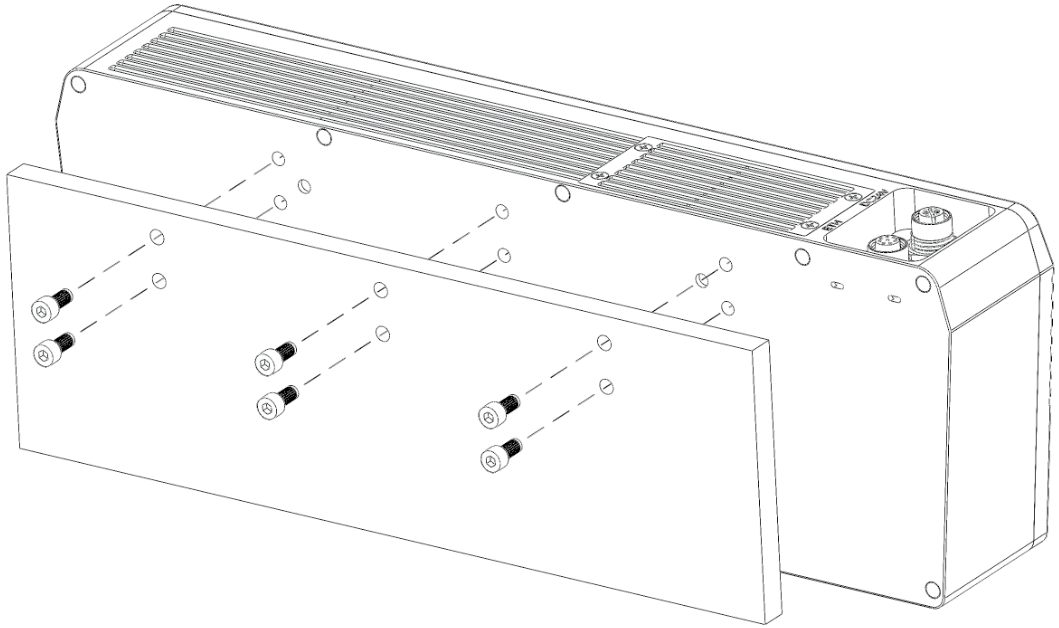
다음 모델 상단에 장착용 나사 구멍이 있습니다: LSR S-GL, LSR XL-GL, NANO ULTRA-GL, UHP-140-GL.
-
육각 렌치를 사용하여 카메라 브라켓을 제거합니다.
-
아래에 표시된 대로 해당 사양의 소켓 헤드 캡 나사를 장착 홀에 넣습니다. 그런 다음 육각 렌치를 사용하여 지정된 순서대로 나사를 느슨하게 조인 후, 모든 나사를 지정된 순서대로 단단히 조입니다.
-
NANO ULTRA-GL: M4 × 8 소켓 헤드 캡 나사(권장 조임 토크: 1.4~1.6N·m)
-
기타 모델: M5 × 8 소켓 헤드 캡 나사(권장 조임 토크: 2.2~2.5N·m)
-
4. 케이블 연결하기
다음 단계에 따라 카메라의 네트워크 케이블과 전원 케이블을 연결하십시오.
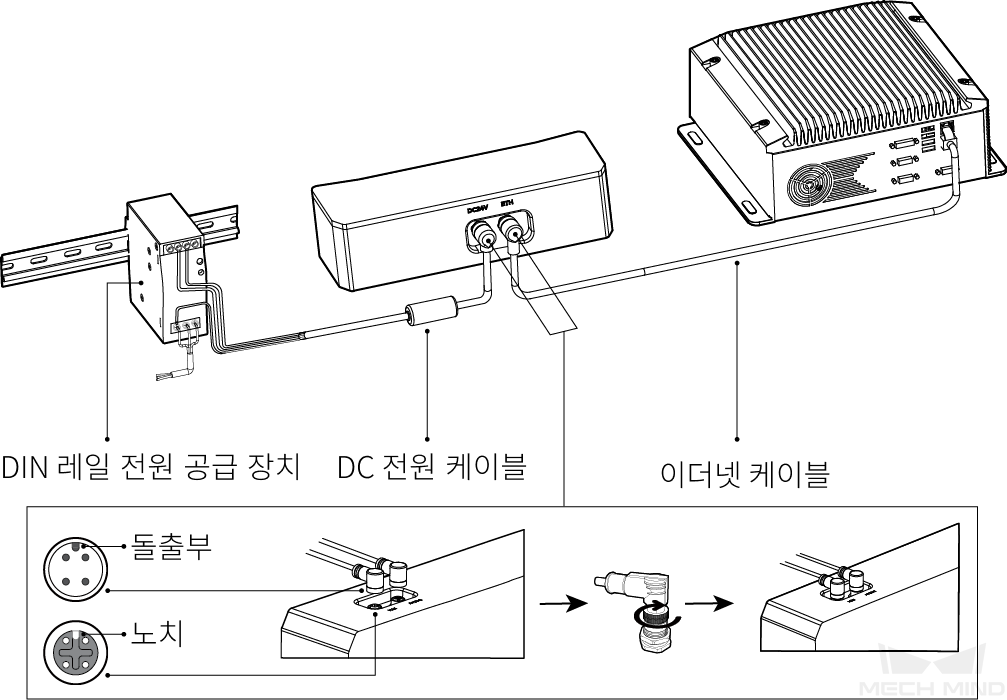
4.1. 네트워크 케이블과 DC 전원 케이블
-
네트워크 케이블: 네트워크 케이블의 항공 플러그를 카메라의 ETH 네트워크 포트에 연결하고 RJ45 커넥터를 IPC의 네트워크 포트에 삽입하세요.
-
DC 전원 케이블: DC 전원 케이블의 항공 플러그를 카메라의 DC 24V 전원 포트에 삽입하세요.
네트워크 케이블과 DC 전원 케이블을 연결할 때 다음과 같이 작업하세요.
-
항공 플러그의 돌출 부분을 해당 인터페이스의 노치에 맞춰서 삽입합니다.
-
너트를 타이트하게 조입니다. 너트를 조일 때 토크의 권장값은 0.7N·m입니다. 너트를 완전히 조인 후에도 약 2mm의 간격이 남습니다.
|
4.2. DIN 레일 전원 공급 장치
|
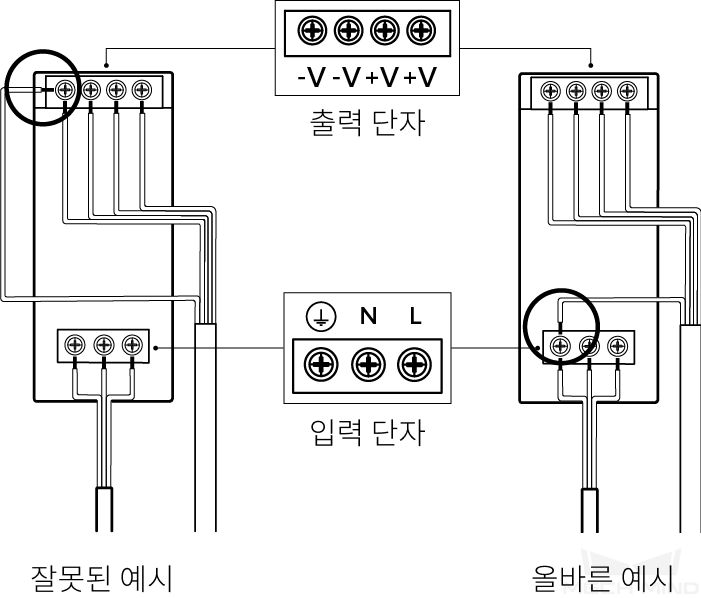
-
일자 드라이버를 사용하여 DIN 레일 전원 공급 장치 단자의 나사를 풉니다.
-
DC 전원 케이블 연결: +V라고 표시된 와이어 2개를 DIN 레일 전원 공급 장치의 +V 출력 단자 2개에 삽입하고, -V라고 표시된 와이어 2개를 -V 출력 단자 2개에 삽입하며, PE라고 표시된 와이어 1개를 접지 단자(
 )에 삽입합니다.
)에 삽입합니다. -
AC 전원 케이블 연결: 활선을 DIN 레일 전원 공급 장치의 L 입력 단자에 삽입하고, 중성선을 N 입력 단자에 삽입하며 접지선을 접지 단자(
)에 삽입합니다. -
일자 드라이버를 사용하여 단자의 나사를 조이세요.
|
5. 예열
본 제품으로 획득한 데이터가 기술 사양에 명시된 정밀도에 도달하도록, 예열 도구를 사용하여 카메라를 반드시 예열해야 합니다.
-
권장 예열 시간 : UHP-140-GL 및 LSR S-GL의 경우 60분이며, 기타 모델은 30분입니다.
-
권장 데이터 획득 간격: 실제 사용 시의 데이터 획득 간격으로 제품을 예열하세요. 실제 사용 시의 데이터 획득 간격이 고정되어 있지 않은 경우, 평균 데이터 획득 간격으로 예열하는 것이 좋습니다. 예를 들어 실제 사용 시에는 6~10초 간격으로 데이터를 획득한다면 예열할 때는 8초 간격으로 데이터를 획득해야 합니다.
카메라 하드웨어의 설치와 연결이 완료되었습니다. 다음으로 Mech-Eye Viewer를 사용하여 카메라를 연결하고 이미지를 캡처하는 방법을 소개하겠습니다.
6. Mech-Eye SDK 다운로드 및 설치하기
Mech-Mind 다운로드 센터에서 Mech-Eye SDK 설치 패키지를 다운받을 수 있습니다.
설치 패키지의 압축을 푼 후 설치 파일을 더블클릭하면 Mech-Eye SDK를 설치할 수 있습니다. 상세한 정보는 Mech-Eye SDK 소프트웨어 설치 가이드를 참조하십시오.
7. IP 주소 설정하기
카메라를 연결하기 전에 다음 두 개의 IP 주소가 동일한 네트워크 세그먼트에 있고 IP 주소가 고유한지 확인하십시오.
-
카메라 IP 주소
-
카메라에 연결된 컴퓨터 네트워크 포트의 IP 주소
다음 단계에 따라 카메라 IP 주소를 설정하십시오.
-
Mech-Eye Viewer를 두 번 클릭하여 엽니다.
-
연결할 카메라를 선택하여
 버튼을 클릭하십시오.
버튼을 클릭하십시오.
8. 카메라 연결하기
-
Mech-Eye Viewer에서 연결할 카메라를 찾아 연결 버튼을 클릭하십시오.
|
소프트웨어나 펌웨어를 업그레이드해야 할 경우 업그레이드 버튼이 표시됩니다. 이 버튼을 클릭하여 업그레이드한 후 카메라를 연결하십시오. |
9. 이미지 캡처하기
상단에 있는 ![]() 버튼을 클릭하면 이미지를 한 번 캡처할 수 있습니다.
버튼을 클릭하면 이미지를 한 번 캡처할 수 있습니다.
|
|
이미지 캡처 버튼 아래의 데이터 유형을 클릭하여 카메라에서 획득한 2D 이미지, 뎁스 맵 및 포인트 클라우드를 볼 수 있습니다.
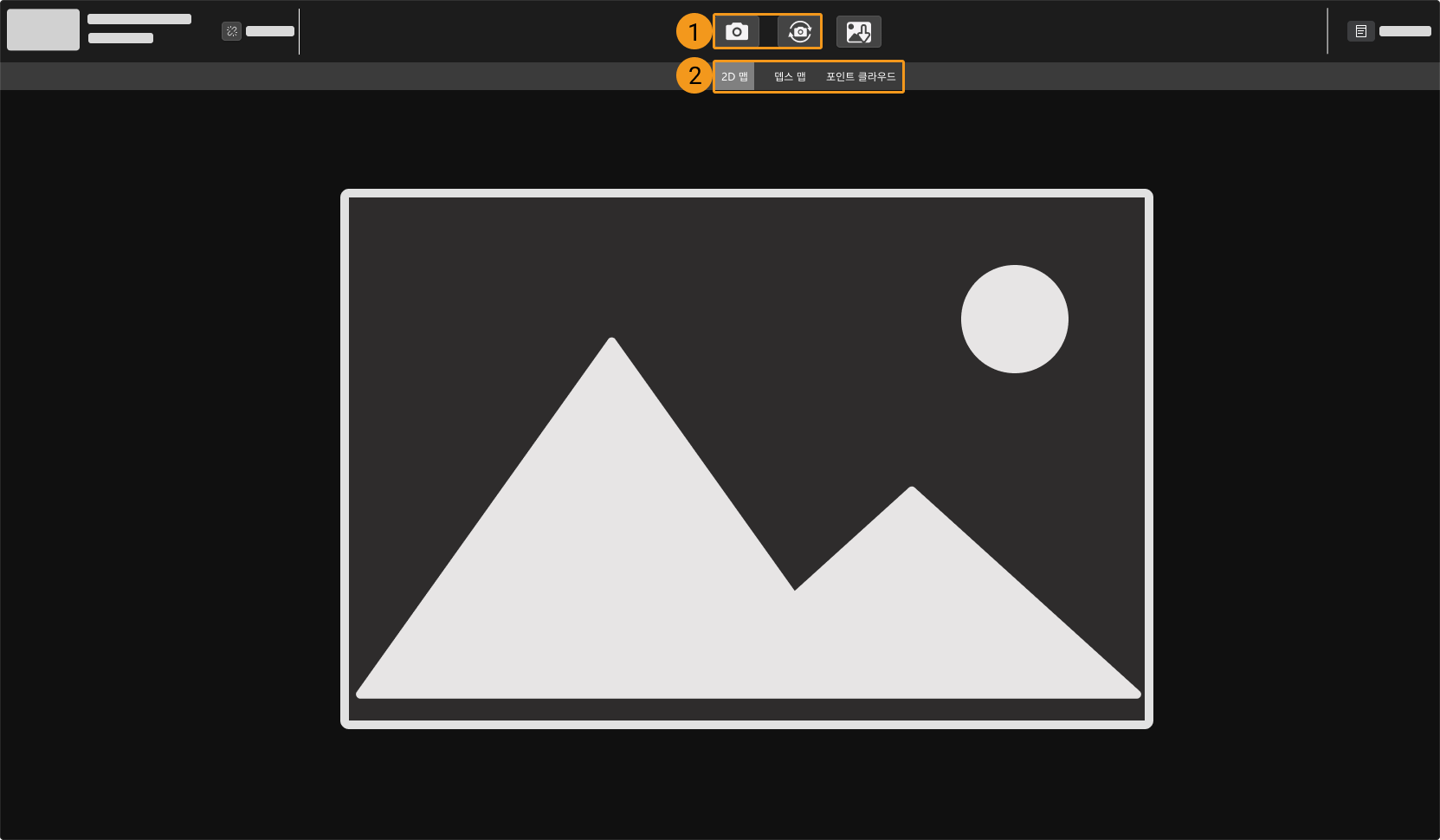
| 이미지 캡처와 데이터 유형에 관한 더 상세한 정보는 데이터 획득 및 확인 내용을 참조하십시오. |
10. 파라미터 조정하기
획득한 2D 이미지, 뎁스 맵 및 포인트 클라우드의 효과가 좋지 않으면 소프트웨어 오른쪽의 파라미터 화면에서 관련 파라미터를 조정하여 데이터의 퀄리티를 향상시킬 수 있습니다.
10.1. 데이터 퀄리티 확인
다음 기준에 따라 데이터 퀄리티를 초보적으로 판단하십시오.
-
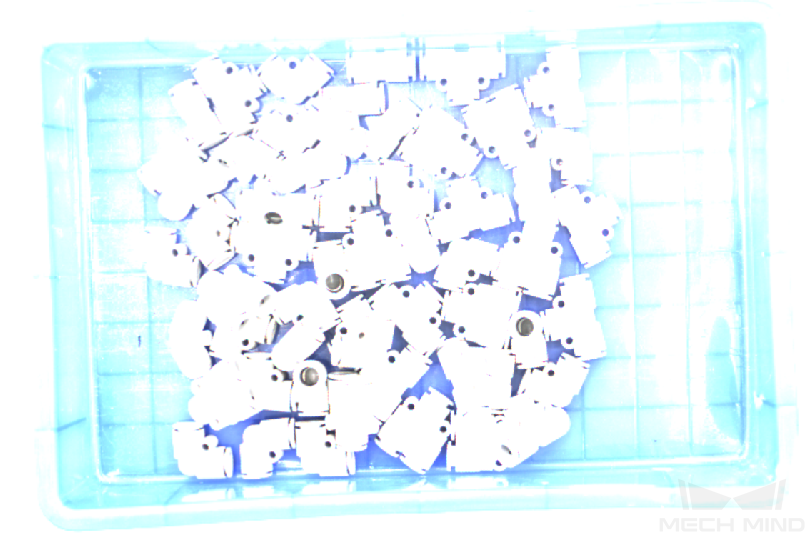
2D 이미지: 2D 이미지가 너무 밝거나 어둡지 않아야 하며 대상 물체의 표면 특성을 명확하게 볼 수 있어야 합니다.
과하게 어두운 경우 휘도가 적당한 경우 과하게 밝은 경우 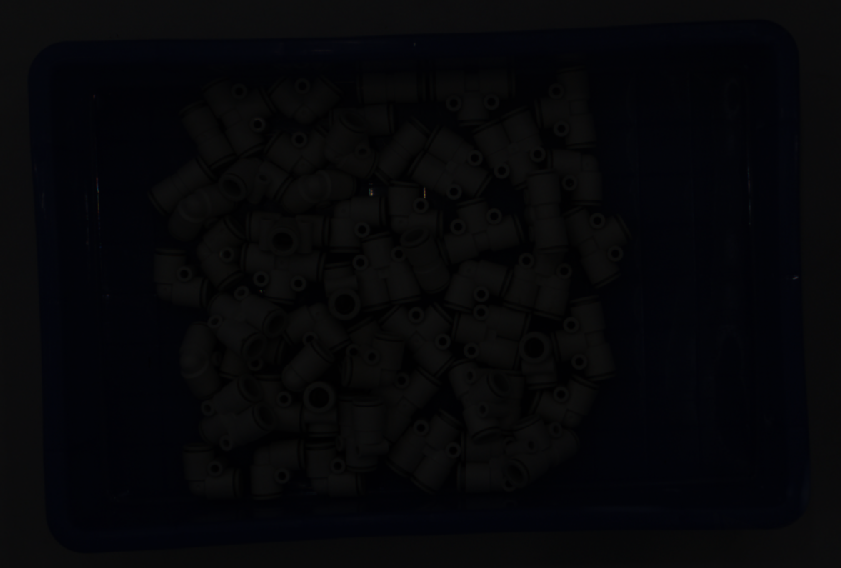

-
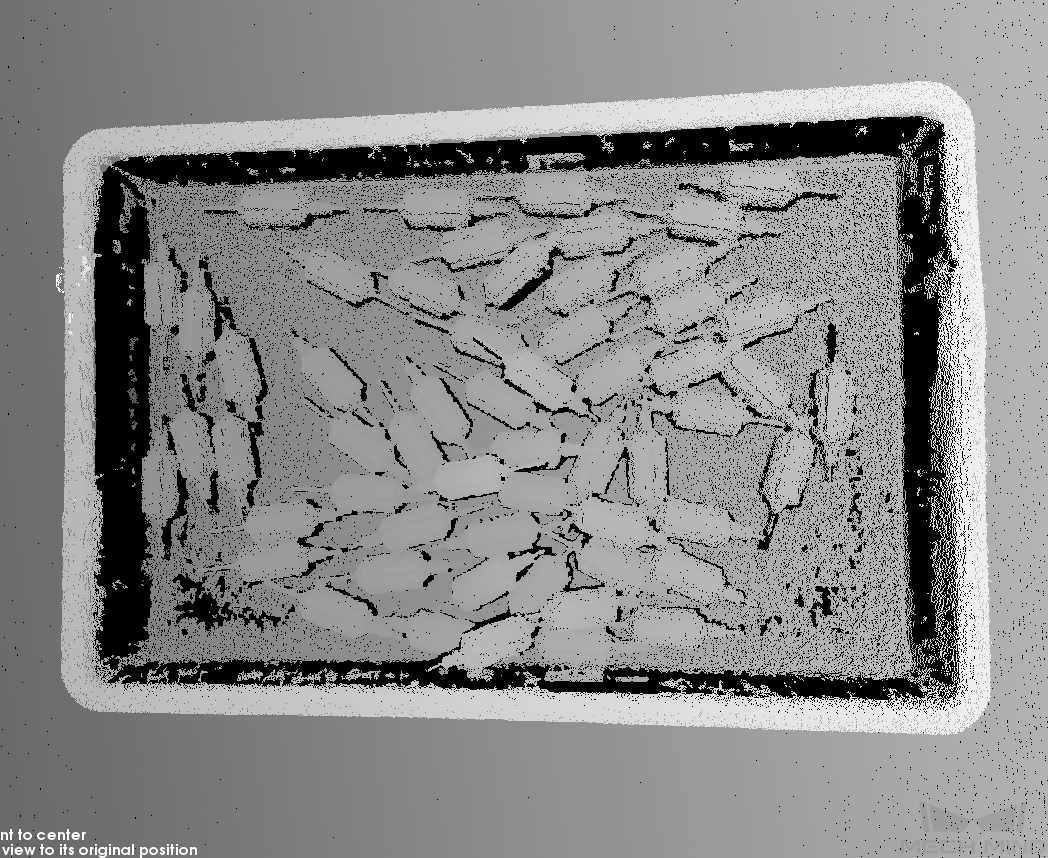
뎁스 맵과 포인트 클라우드: 뎁스 맵과 포인트 클라우드에서 대상 물체에 해당하는 이미지는 완전해야 합니다. 다음 예시 중의 대상 물체는 로터입니다.
대상 물체의 포인트 클라우드가 불완전함 대상 물체의 포인트 클라우드가 완전함 
10.2. 2D 이미지 퀄리티 향상
-
2D 파라미터 중의 노출 모드를 고정 노출로 설정하고노출 시간을 조정하십시오.
-
2D 이미지가 너무 어두우면 노출 시간을 늘리십시오.
-
2D 이미지가 너무 밝으면 노출 시간을 줄이십시오.
DEEP-GL 및 LSR 시리즈 카메라는 서로 다른 파라미터에 해당하는 두 가지 2D 이미지를 제공합니다. 상세한 설명은 DEEP-GL 파라미터와 LSR 시리즈 파라미터 내용을 참조하세요.
-
-
이미지를 다시 캡처하여 2D 이미지의 퀄리티를 확인하십시오.
10.3. 뎁스 맵 및 포인트 클라우드의 퀄리티 향상
-
3D 파라미터그룹에서 노출 시간 파라미터를 조정하십시오.
-
물체 색상이 어둡고 빛을 쉽게 반사하지 않으면 노출 시간을 늘리십시오.
-
물체 색상이 밝거나 빛을 쉽게 반사하면 노출 시간을 줄이십시오.
-
-
이미지를 다시 캡처하여 뎁스 맵과 포인트 클라우드의 퀄리티를 확인하십시오.
| 더 많은 파라미터에 관한 설명은 파라미터에 관한 설명 내용을 참조하십시오. |
11. 데이터를 사용하기
Mech-Eye Viewer를 통해 얻은 2D 이미지, 뎁스 맵 및 포인트 클라우드는 직접 로컬에 저장하거나 Mech-Vision 또는 타사 머신 비전 소프트웨어를 사용하여 후속 처리 및 계산을 수행할 수 있습니다.
-
데이터 저장 : 이미지 캡처 영역의
 버튼을 클릭하여 저장 경로를 설정하고 저장할 데이터의 유형 선택한 후 저장 버튼을 클릭하십시오.
버튼을 클릭하여 저장 경로를 설정하고 저장할 데이터의 유형 선택한 후 저장 버튼을 클릭하십시오. -
Mech-Vision에서 데이터를 활용하는 경우, Mech-Vision을 포함한 전체 비전 시스템 구축을 학습하기 위해 비전 시스템 튜토리얼 내용을 참조하십시오.
-
타사 머신 비전 소프트웨어에서 데이터를 활용하는 경우,Mech-Eye API 또는 GenICam 인터페이스를 통해 카메라에서 획득한 데이터를 타사 소프트웨어로 전송할 수 있습니다.