포인트 클라우드의 누락 문제




해결 방법
다음 단계를 수행하여 문제를 해결하십시오.
-
카메라 렌즈를 청소한 다음 데이터를 다시 획득하고 포인트 클라우드의 품질을 확인합니다.
-
획득한 포인트 클라우드가 완전하면 문제 해결이 완료됩니다.
-
문제가 여전히 해결되지 않으면 다음 단계를 수행하십시오.
-
-
실제 작업 환경에 따라 포인트 클라우드가 누락될 수 있는 원인을 파악하고, 아래 표의 해당 섹션에서 해결 방법을 확인하십시오.
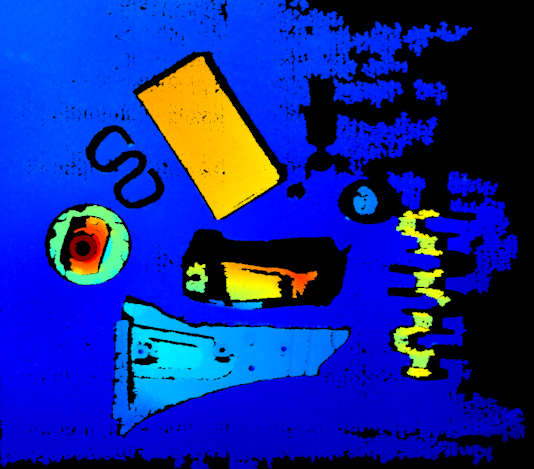
포인트 클라우드 누락은 여러 가지 원인으로 인해 발생할 수 있습니다.
작업 환경 가능한 원인 작업대가 창문 가까이에 있거나 작업장의 빛이 강합니다.
대상 물체는 매끄럽고 광택이 나는 표면을 가지고 있습니다.
대상 물체의 모양이 복잡하고 표면이 매끄럽고 광택이 있거나 트레이가 매끄럽고 광택이 있습니다.
-
데이터 획득 영역의
 버튼을 클릭하여 데이터를 한 번 캡처하고 포인트 클라우드를 확인합니다.
버튼을 클릭하여 데이터를 한 번 캡처하고 포인트 클라우드를 확인합니다.-
획득한 포인트 클라우드가 완전하면 문제 해결이 완료됩니다.
-
문제가 여전히 해결되지 않으면 기술 서포트팀에게 문의하십시오.
-
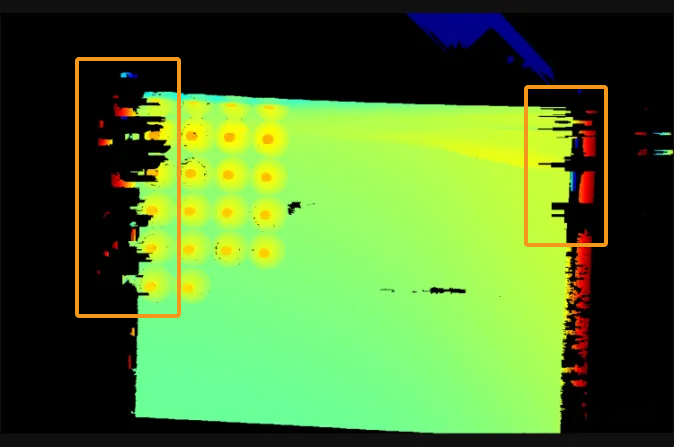
강한 환경광으로 인한 포인트 클라우드 누락 문제
다음 해결 방법을 시도하십시오.
-
빛 차단 장치를 사용하여 광원을 차단합니다.
-
3D 파라미터 범주에 속하는 노출 시간 파라미터의 값을 낮춰줍니다.
-
구조형 광 밝기 증가: 아래 표에 따라 사용하는 카메라 모델에 따라 프로젝터 밝기 또는 레이저 강도의 값을 높입니다.
모델 파라미터 설정 NANO-GL, NANO ULTRA-GL, PRO S-GL, PRO M-GL, UHP-140-GL
3D 파라미터 범주에 속하는 프로젝터 서브 그룹에서 프로젝터 밝기 파라미터를 조정합니다.
DEEP-GL, LSR S-GL, LSR L-GL 및 LSR XL-GL
3D 파라미터 범주에 속하는 레이저 서브 그룹에서 레이저 강도 파라미터를 조정합니다.
-
DEEP-GL, LSR S-GL, LSR L-GL 또는 LSR XL-GL 카메라를 사용하는 경우, 마스터 모드로 전환하고 구조형 광의 투사 범위를 조정할 수 있습니다.
-
3D 파라미터 범주에 속하는 레이저 투사 프레임 컨트롤 서브 그룹에서 레이저 투사 범위 진폭 값을 낮춥니다.
이 파라미터의 값을 낮추면 투사 범위가 더 좁아집니다. 카메라는 투사 범위 밖의 데이터를 캡처할 수 없습니다.
-
3D 파라미터 범주에 속하는 레이저 투사 프레임 컨트롤 서브 그룹에서 레이저 투사 분할 영역 수의 값을 높입니다.
-
3D 파라미터 범주에 속하는 프린지 코딩 모드 파라미터를 Reflective 옵션으로 설정하면 해당 파라미터를 사용할 수 없습니다.
-
이 파라미터의 값을 올려주면 캡처 속도가 느려집니다.
-
-
-
카메라나 대상 물체를 움직여 작업 거리를 줄입니다.
-
강한 환경광을 피하기 위해 카메라 위치와 촬영 각도를 조정합니다.
카메라나 대상 물체의 위치가 변경되면 파라미터를 다시 조정해야 합니다.
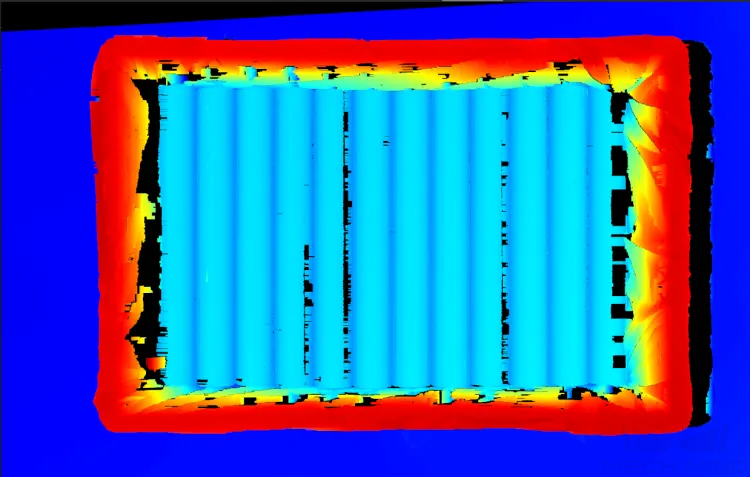
거울 반사로 인한 포인트 클라우드 누락 문제
거울 반사로 인해 대상 물체 표면의 노출 과다 또는 노출 부족 영역이 나타나여 해당 영역에서 포인트 클라우드가 누락될 수 있습니다.
-
거울 반사로 인해 포인트 클라우드가 누락되는 경우, 다음 방법을 통해 문제를 해결하십시오.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, NANO ULTRA-GL, PRO S-GL 또는 PRO M-GL 카메라를 사용하는 경우, 프린지 코딩 모드를 Reflective로 설정할 수 있습니다.
-
프린지 코딩 모드가 Reflective로 설정되지 않은 경우, 3D 파라미터 범주 속의 3D 노출 설정을 조정하십시오.
-
-
거울 반사로 인해 대상 물체 표면에만 노출 과다 현상이 발생하는 경우, 다음 해결 방법도 시도해 볼 수 있습니다.
-
구조형 광 밝기 감소: 아래 표에 따라 사용하는 카메라 모델에 따라 프로젝터 밝기 또는 레이저 강도의 값을 낮춥니다.
모델 파라미터 설정 NANO-GL, NANO ULTRA-GL, PRO S-GL, PRO M-GL, UHP-140-GL
3D 파라미터 범주에 속하는 프로젝터 서브 그룹에서 프로젝터 밝기 파라미터를 조정합니다.
DEEP-GL, LSR S-GL, LSR L-GL 및 LSR XL-GL
3D 파라미터 범주에 속하는 레이저 서브 그룹에서 레이저 강도 파라미터를 조정합니다.
-
카메라나 대상 물체를 움직이고 촬영 각도를 조정하여 감광 장치에 반사되는 빛을 감소합니다.
-
-
거울 반사로 인해 대상 물체 표면에만 노출 부족 현상이 발생하는 경우, 다음 해결 방법도 시도해 볼 수 있습니다.
-
카메라나 대상 물체를 움직이고 촬영 각도를 조정하여 감광 장치에 반사되는 빛을 증가합니다.
카메라나 대상 물체의 위치가 변경되면 파라미터를 다시 조정해야 합니다.
-
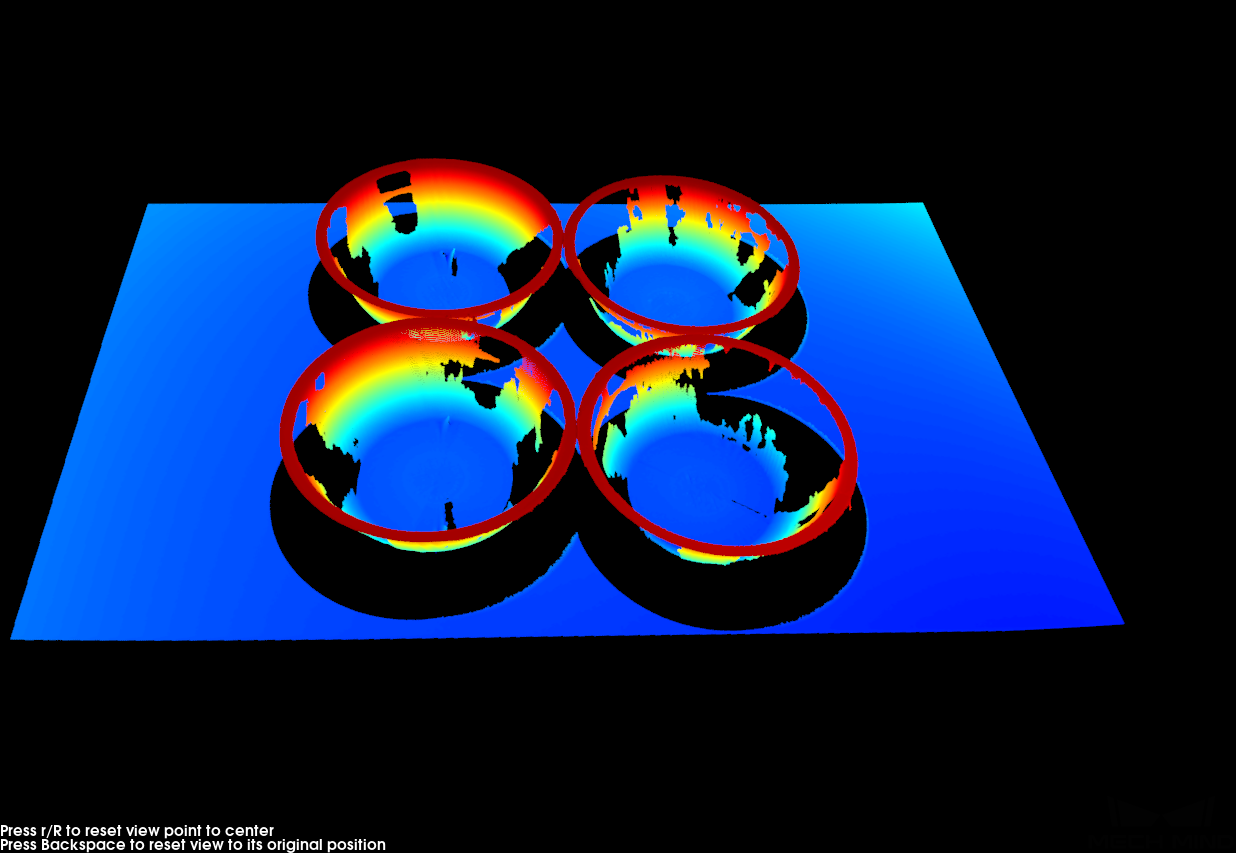
다중 반사로 인한 포인트 클라우드 누락 문제
다음 해결 방법을 시도하십시오.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, NANO ULTRA-GL, PRO S-GL 또는 PRO M-GL 카메라를 사용하는 경우, 프린지 코딩 모드를 Reflective로 설정할 수 있습니다.
-
프린지 코딩 모드가 Reflective로 설정되지 않은 경우, 3D 파라미터 범주 속의 3D 노출 설정을 조정하십시오.
트레이 벽의 다중 반사로 인해 포인트 클라우드가 누락된 경우 다음 해결 방법을 시도해 볼 수도 있습니다.
-
마스터 모드로 전환한 후, 3D 파라미터 범주의 레이저 투사 프레임 컨트롤에서 레이저 투사 범위 진폭 파라미터의 값을 낮춰줍니다.
-
검은 천을 사용하여 트레이의 벽을 덮습니다.
-
반사율이 상대적으로 낮은 트레이로 바꿉니다.
-
트레이의 벽이 카메라 바로 아래에 위치하도록 트레이를 움직입니다.
이 방법은 최대 한 트레이의 연결된 두 측벽의 다중 반사를 방지할 수 있습니다.
-
트레이가 전체 시야를 차지하도록 카메라 위치를 올립니다.
카메라나 대상 물체의 위치가 변경되면 파라미터를 다시 조정해야 합니다.