포인트 클라우드 Bounding Box 생성
사용 방법
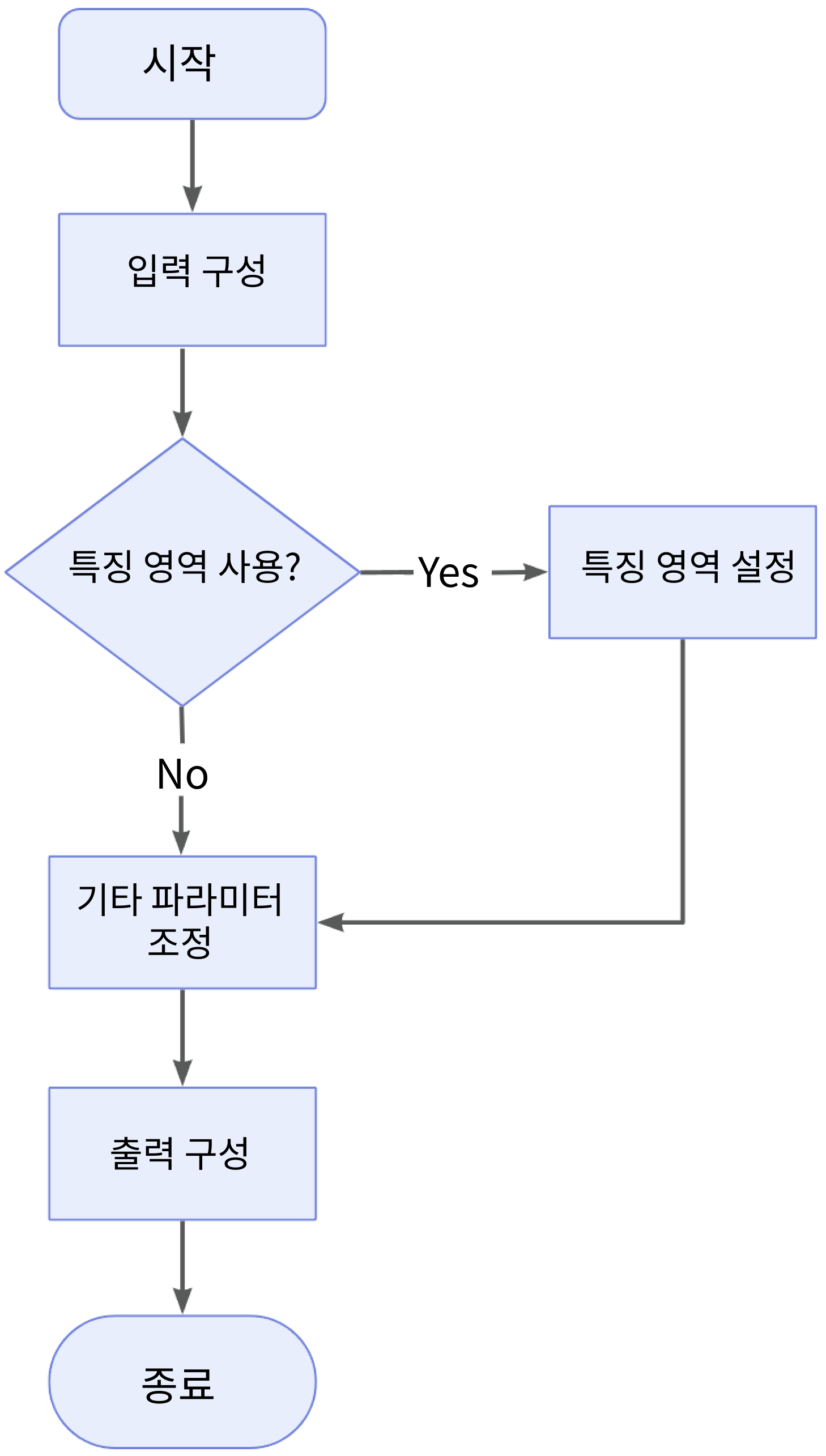
이 스텝의 사용 방법은 다음과 같습니다.
-
입력할 데이터를 선택합니다. 해당 스텝의 포트를 연결하거나 파라미터 설정 영역의 입력 패널에서 해당 입력 데이터를 선택합니다.
-
특징 영역의 사용 여부를 결정합니다.
-
기타 파라미터를 설정합니다.
-
출력 표시줄에서 출력 항목 옵션을 선택하고, 출력 항목 왼쪽에 있는 ▶를 클릭하여 펼친 후 유효 범위 내에서 최소값과 최대값을 입력합니다.
파라미터
| 파라미터 | 설명 | ||
|---|---|---|---|
특징 영역 사용 |
이 옵션을 선택하지 않으면 전체 포인트 클라우드에 대해 최소 부피 바운딩 박스(Bounding Box)가 생성됩니다. 옵션을 선택하면 하나 이상의 특징 영역을 설정할 수 있으며, Bounding Box는 특징 영역 내 포인트 클라우드를 기준으로 생성됩니다. |
||
포인트 클라우드 다운 샘플링 |
이 파라미터는 바운딩 박스 계산 전 포인트 클라우드를 다운샘플링할지 여부를 결정합니다. 포인트 클라우드가 매우 밀집된 경우, 다운샘플링을 통해 포인트 수를 줄여 계산 효율을 높일 수 있습니다. 이 옵션을 선택하면 Voxel 크기를 설정해야 합니다. 다운샘플링은 포인트 클라우드 공간을 3차원 복셀(Voxel)로 분할한 후, 각 복셀 내의 모든 포인트를 하나의 대표 포인트로 대체하는 과정입니다. Voxel 크기가 클수록 처리 속도는 빨라지나, 디테일 손실이 커져 경계 영역이 더 넓어질 수 있습니다. 반대로, Voxel 크기가 작을수록 디테일은 더 잘 보존되지만 처리 속도는 느려집니다.
|
||
오일러 각 회전 순서 |
이 파라미터는 바운딩 박스 생성 시 회전 순서를 지정하는 데 사용됩니다. 해당 설정은 스텝에서 출력되는 각도에만 영향을 미치며, 바운딩 박스의 크기와 위치에는 영향을 주지 않습니다. 기본값 : Auto. 기본 옵션을 사용하면 시스템이 자동으로 최적의 회전 순서를 선택합니다. 값 리스트 : Auto, X→Y→Z, X→Z→Y, Y→X→Z, Y→Z→X, Z→X→Y, Z→Y→X |
출력
| 파라미터 | 설명 | ||
|---|---|---|---|
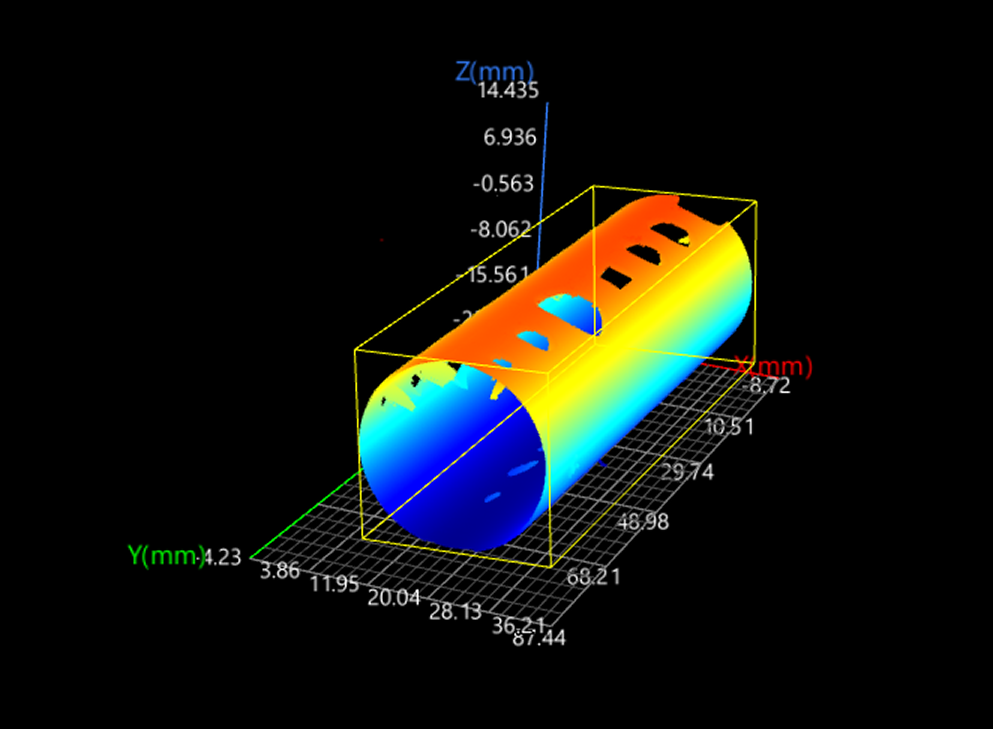
포인트 클라우드 Bounding Box |
포인트 클라우드를 단단히 감싸는 최소 부피의 바운딩 박스입니다. |
||
중심점 X좌표 중심점 Y좌표 중심점 Z좌표 |
Bounding Box의 기하학적 중심 좌표는 3D 공간에서 바운딩 박스의 위치를 나타냅니다. 단위는 mm입니다. |
||
X축 기준 회전 각도 Y축 기준 회전 각도 Z축 기준 회전 각도 |
해당 각도들은 오일러 각(Euler angles)으로, 세계 좌표계 기준에서 바운딩 박스가 X, Y, Z 축을 중심으로 회전한 각도를 각각 나타냅니다. 이 값들은 '오일러 각 회전 순서' 파라미터의 영향을 받습니다. 단위는 도(°)입니다. |
||
너비(X) 길이(Y) 높이(Z) |
각 값은 Bounding Box의 로컬 좌표계 기준 X, Y, Z 방향에서의 크기를 각각 나타냅니다. 단위는 mm입니다. |
||
Bounding Box 부피 |
바운딩 박스로 둘러싸인 3D 공간의 부피입니다. 단위는 mm3입니다. |
||
Bounding Box 중심 |
바운딩 박스의 기하학적 중심에 있는 특징점입니다. |
||
Bounding Box X축 Bounding Box Y축 Bounding Box Z축 |
각각 바운딩 박스의 로컬 좌표계 기준 X, Y, Z축에 해당하며, 바운딩 박스의 기하학적 중심을 지납니다.
|
오류 분석
|