Empezar a Usar la Cámara
Este capítulo presenta las operaciones desde revisar el contenido del paquete hasta adquirir datos con Mech-Eye Viewer.
|
Las imágenes mostradas se indican solamente a título informativo. El producto real puede ser diferente. |
1. Revisar el Contenido del Paquete
-
Una vez recibido el paquete de cámara, asegúrese de que está en buen estado y no presenta daños.
-
Asegúrese de que no hay daños o piezas faltantes de acuerdo con el Contenido del Paquete que se encuentra en el mismo paquete.
| La lista de abajo se indica solamente a título informativo. El Contenido del Paquete real puede ser diferente. |
|
|
|
|
|
|
|
|
|
|
Tornillos de cabeza hueca M4 × 8, cantidad: 8 |
Tornillos de cabeza hueca M5 × 8, cantidad: 8 |
Pernos de cabeza hueca M8 × 20, cantidad: 2 |
Pernos en T M8 × 20, cantidad: 2 |
|
|
Tuercas M8, cantidad: 2 |
Tuercas de brida M8, cantidad: 2 |
|
|
Arandelas M8, cantidad: 2 |
Pasadores Ø6 × 10, cantidad: 4 |
Soporte de cables, cantidad: 1 |
Bridas, cantidad: 50 |
|
|
Llaves hexagonales, cantidad: 3 |
Tabla de calibración (solo UHP-140-GL) |
|
|
|
Aparte del paquete de cámara, podría recibir los accesorios opcionales (en el caso de que haya comprado):
|
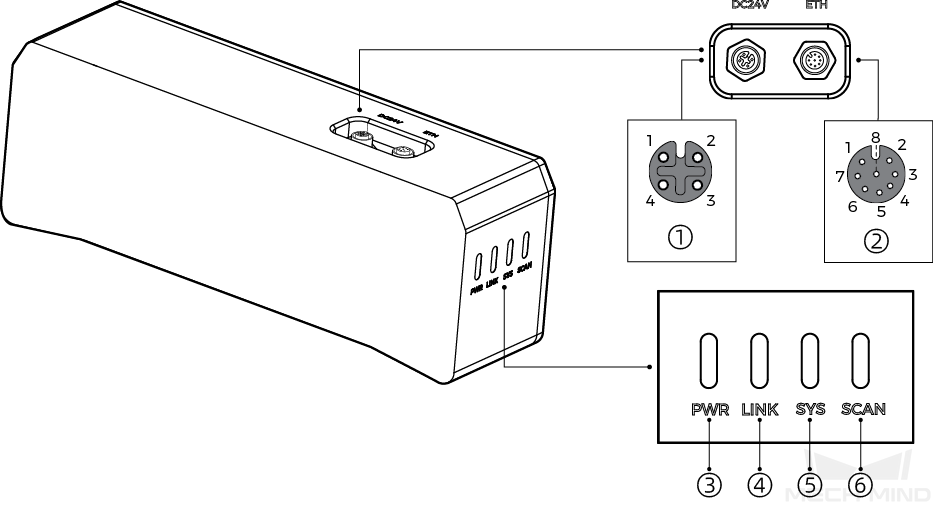
2. Revisar los Puertos y las Luces Indicadoras
Revise los puertos y las luces indicadoras de cámara con las imágenes y tablas de abajo.
2.1. DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL y UHP-140-GL
N. |
Nombre |
Función |
|
|---|---|---|---|
① |
Puerto de alimentación DC 24V |
1: GND |
3: 24 V CC |
2: GND |
4: 24 V CC |
||
② |
Puerto ETH |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
③ |
Luz indicadora de PWR |
Apagada: sin conexión a la alimentación |
|
Verde: tensión normal |
|||
Amarilla fija: tensión inferior a 16 V o superior a 28 V |
|||
Roja fija: tensión inferior a 12 V |
|||
④ |
Luz indicadora de LINK |
Apagada: sin conexión a la red |
|
Verde fija o intermitente: conectada a la red |
|||
⑤ |
Luz indicadora de SYS |
Apagada: sin iniciarse el sistema |
|
Verde fija: iniciándose el sistema |
|||
Verde intermitente: funcionamiento normal |
|||
Amarilla intermitente: tensión no estable o temperatura anormal |
|||
Roja intermitente: error clave |
|||
⑥ |
Luz indicadora de SCAN |
Verde fija: adquiriendo y procesando datos |
|
Apagada: sin adquirir o procesar datos |
|||
2.2. NANO-GL y NANO ULTRA-GL
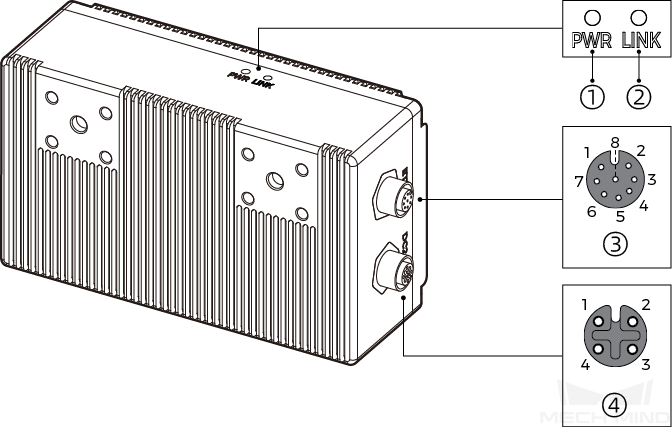
|
Se usa NANO-GL como ejemplo en la ilustración de arriba. |
N. |
Nombre |
Función |
|
|---|---|---|---|
① |
Luz indicadora de PWR |
Apagada: sin conexión a la alimentación |
|
Verde: tensión normal |
|||
② |
Luz indicadora de LINK |
Apagada: sin conexión a la red |
|
Verde fija o intermitente: conectada a la red |
|||
③ |
Puerto ETH |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
④ |
Puerto de alimentación DC 24V |
1: GND |
3: 24 V CC |
2: GND |
4: 24 V CC |
||
3. Montar la Cámara
La cámara se puede montar mediante los siguientes dos métodos:
| Método de Montaje | Requisitos |
|---|---|
Se monta en la brida del robot y mueve con el robot. 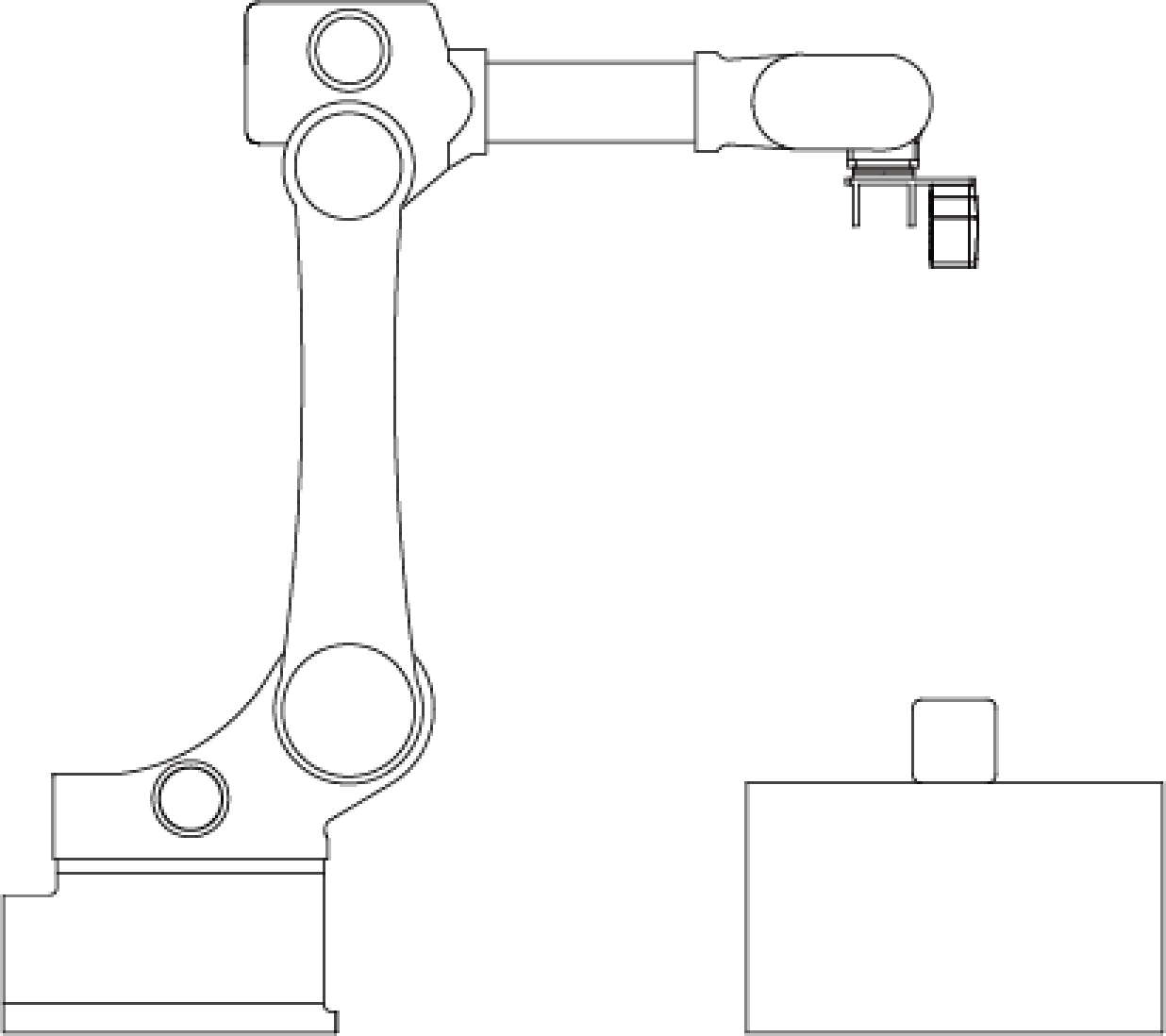
|
|
Se monta en un marco fijo y no mueve con el robot. 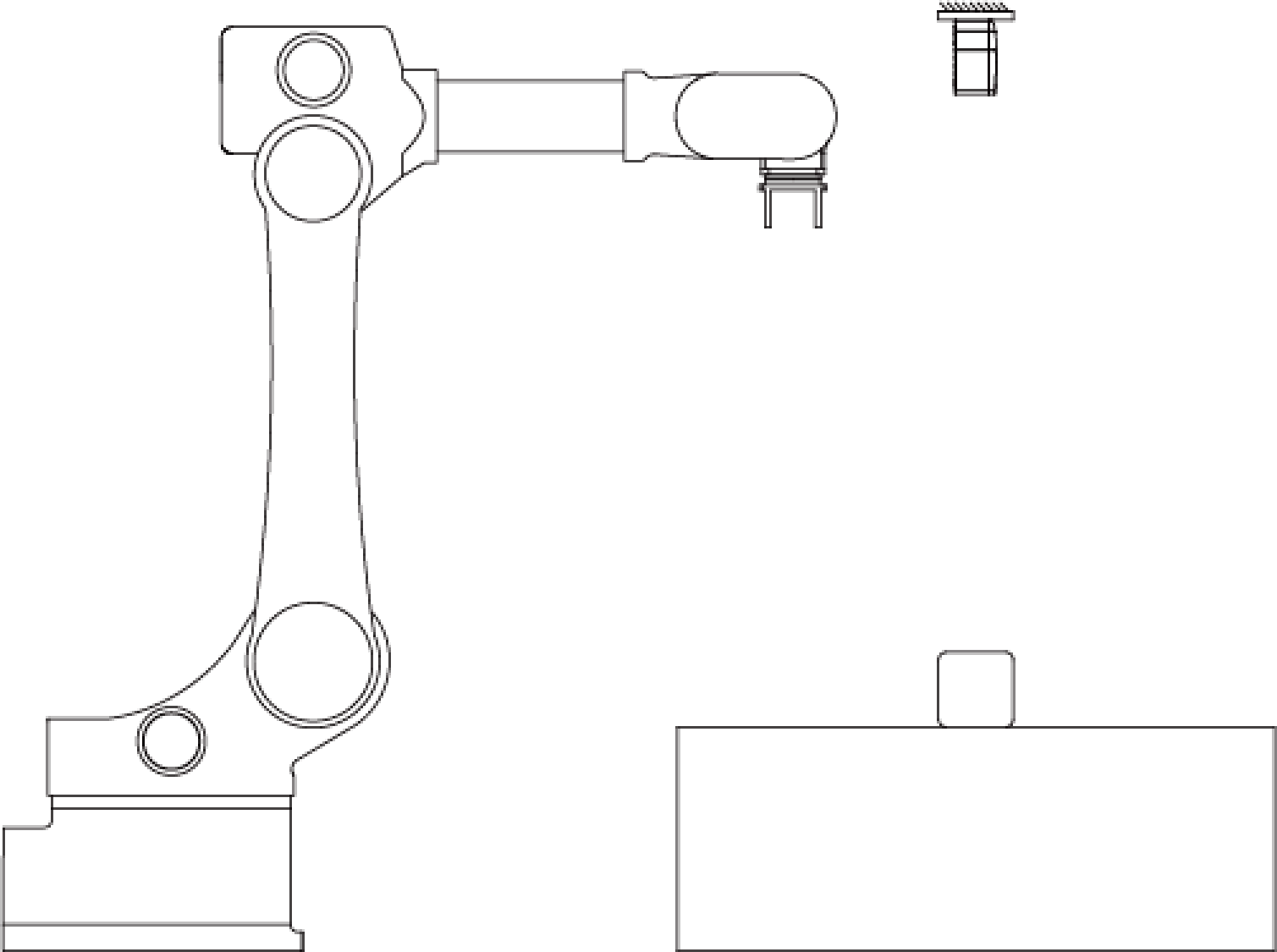
|
|
Se monta en un carril lineal y mueve con el carril lineal. 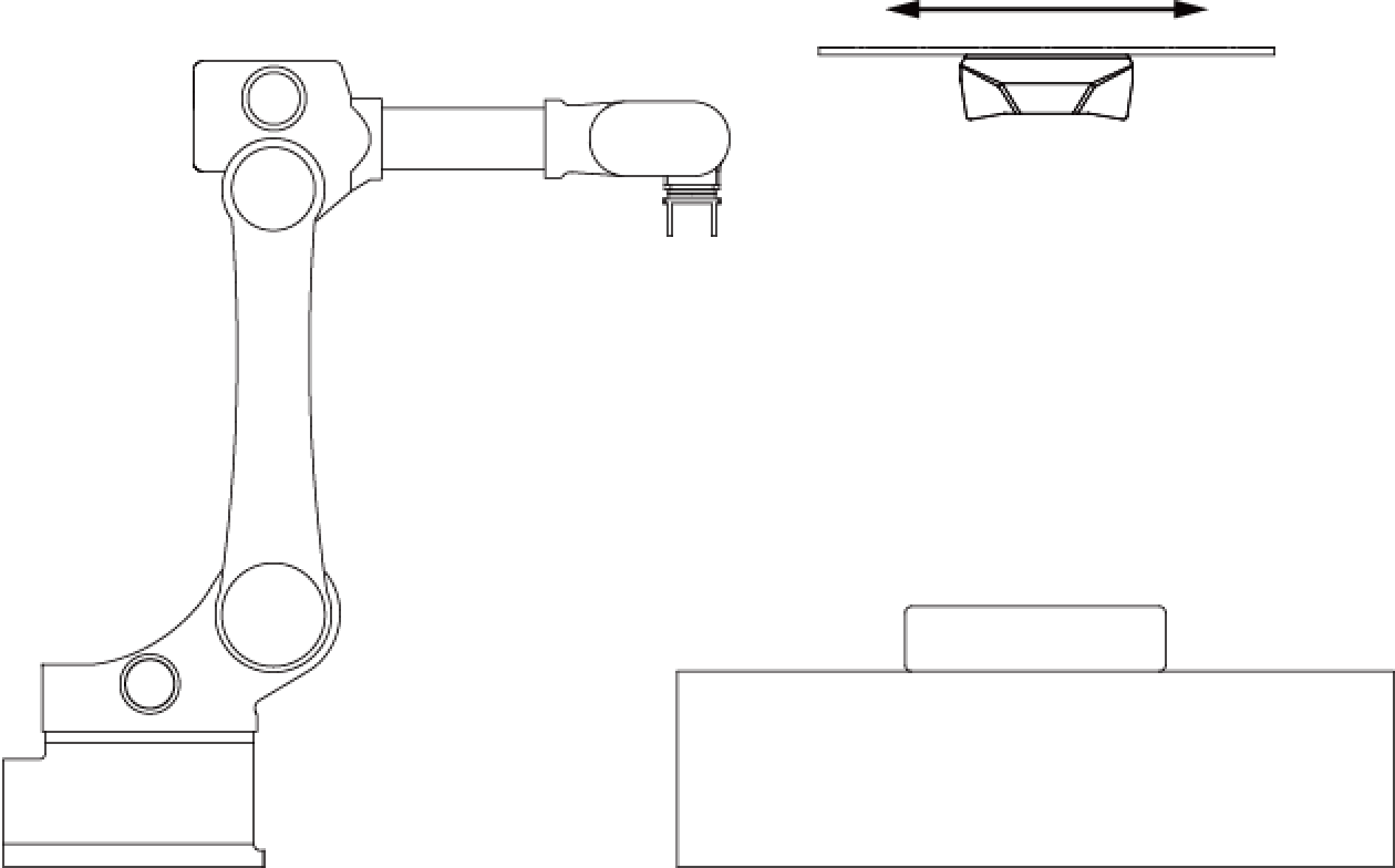
|
|
|
Al confirmar el método de montaje, monte la cámara a la superficie de montaje con la placa de montaje o los orificios roscados según las siguientes secciones.
|
3.1. Montar con la Placa de Montaje de Cámara
El uso de la placa de montaje de la cámara puede facilitar su montaje en las dos siguientes superficies de montaje:
-
Extrusión de aluminio con ranura en T
-
Superficie de montaje con agujeros para clavijas abiertos
|
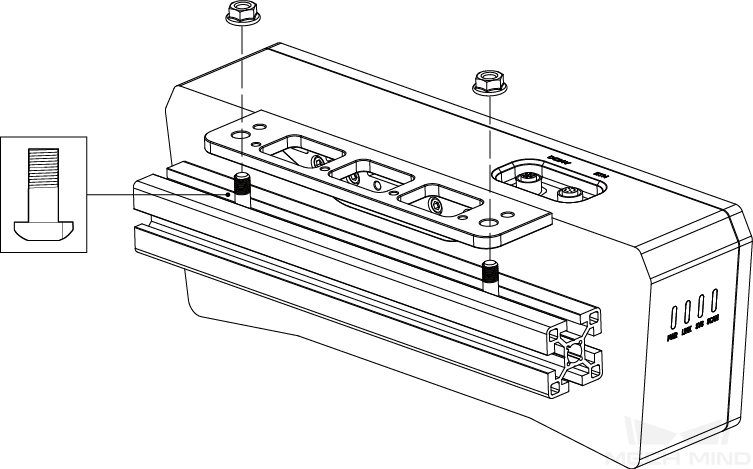
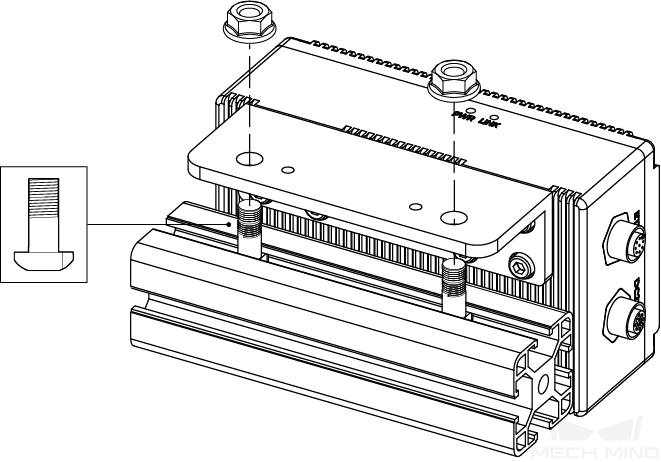
3.1.1. Montar a la Extrusión de Aluminio con Ranura en T
Como se muestra a continuación, coloque 2 arandelas M8 y 2 tornillos en T M8 × 20 y, a continuación, use la llave de boca abierta para apretar 2 tuercas de brida. La torsión de apriete recomendada es de 12 a 13 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL y UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
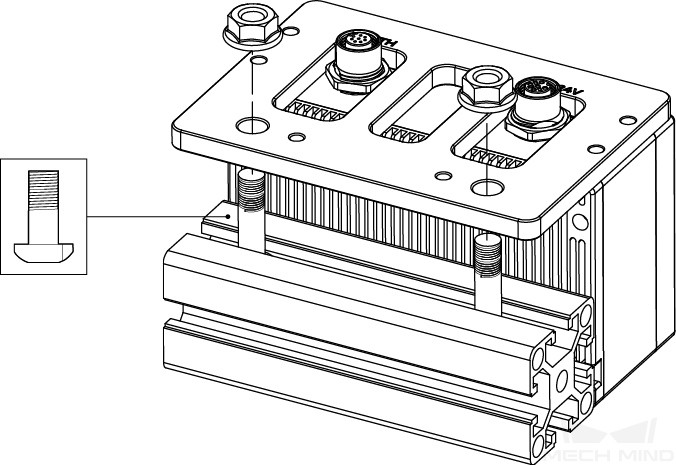
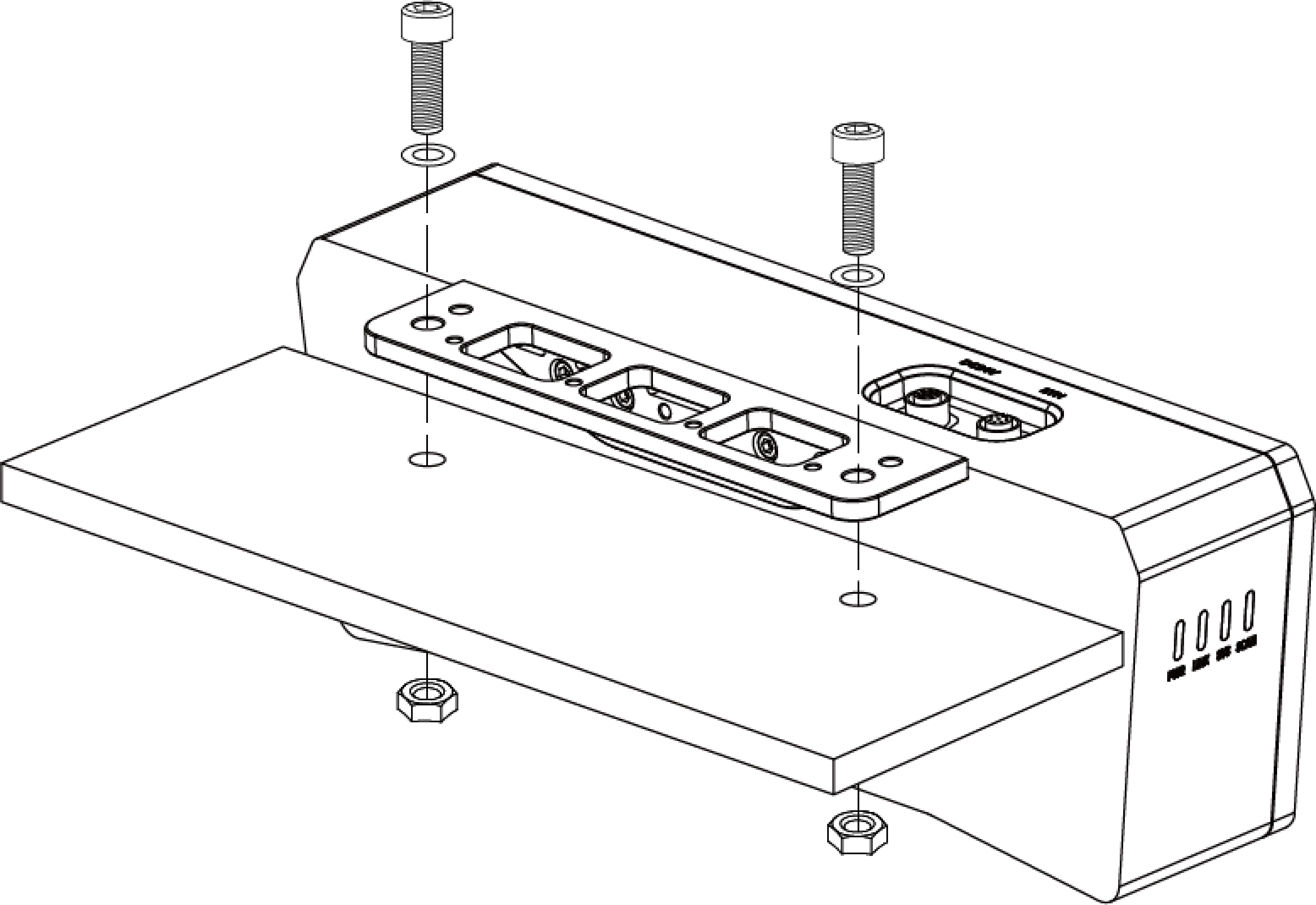
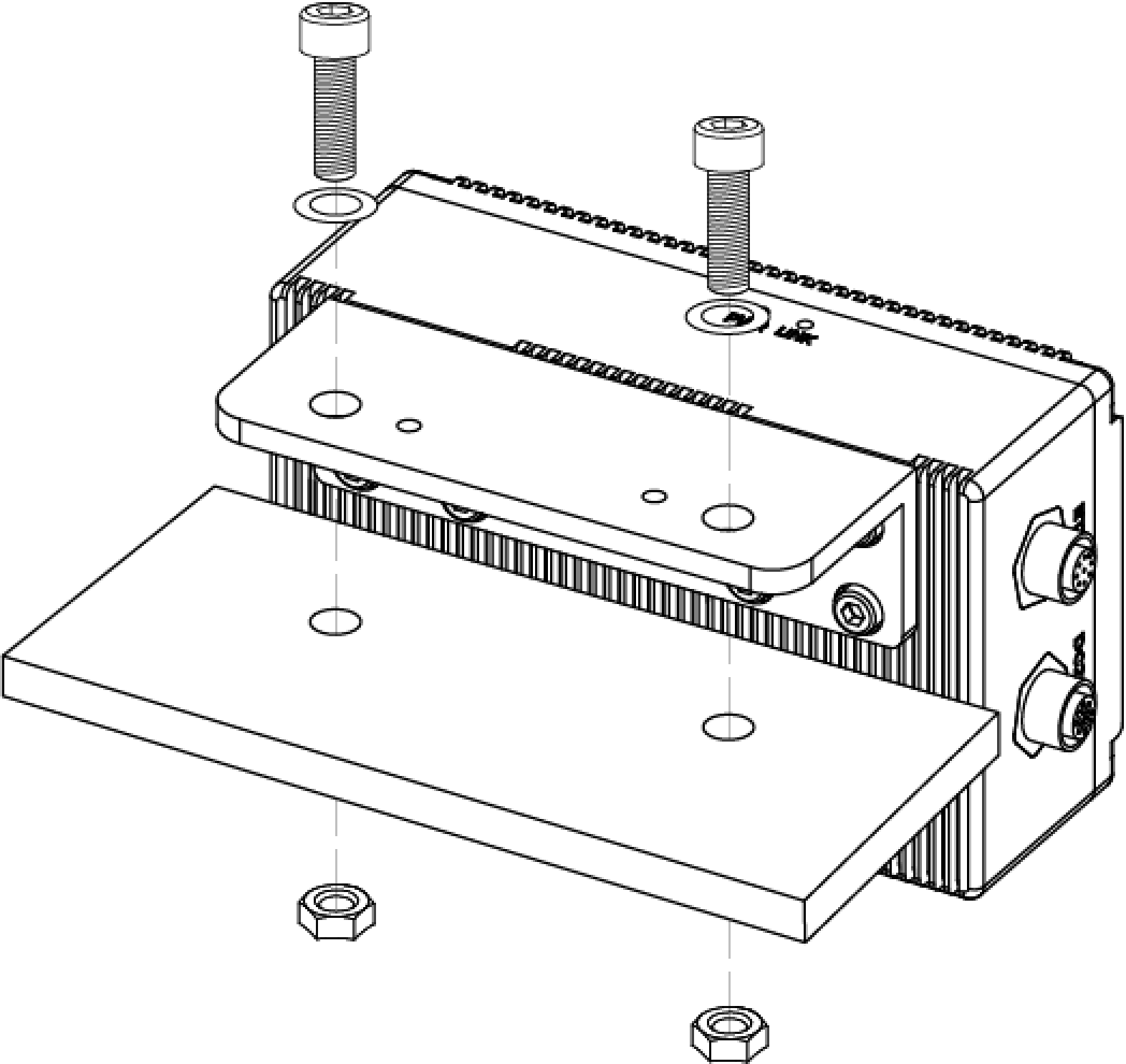
3.1.2. Montar a la Superficie de Montaje con Agujeros para Clavijas Abiertos
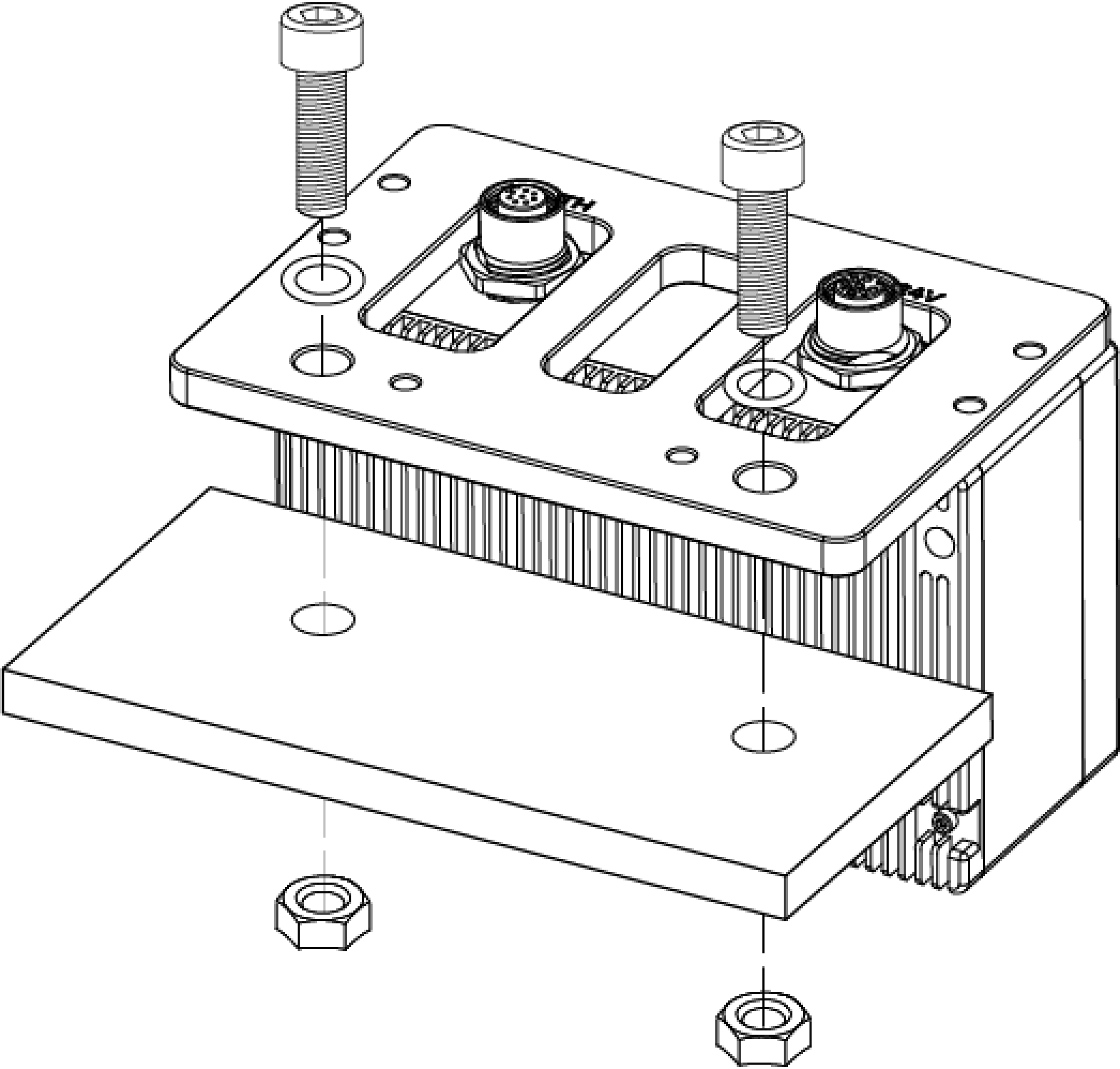
Como se muestra a continuación, coloque 2 arandelas M8 y 2 tornillos de cabeza hueca M8 × 20 y, a continuación, use la llave de boca abierta para apretar 2 tuercas. La torsión de apriete recomendada es de 12 a 13 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL y UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
3.1.3. Montar el Soporte de Cables
Después de montar el soporte de cables, puede sujetar los cables con bridas de cremallera para evitar los daños por tensión.
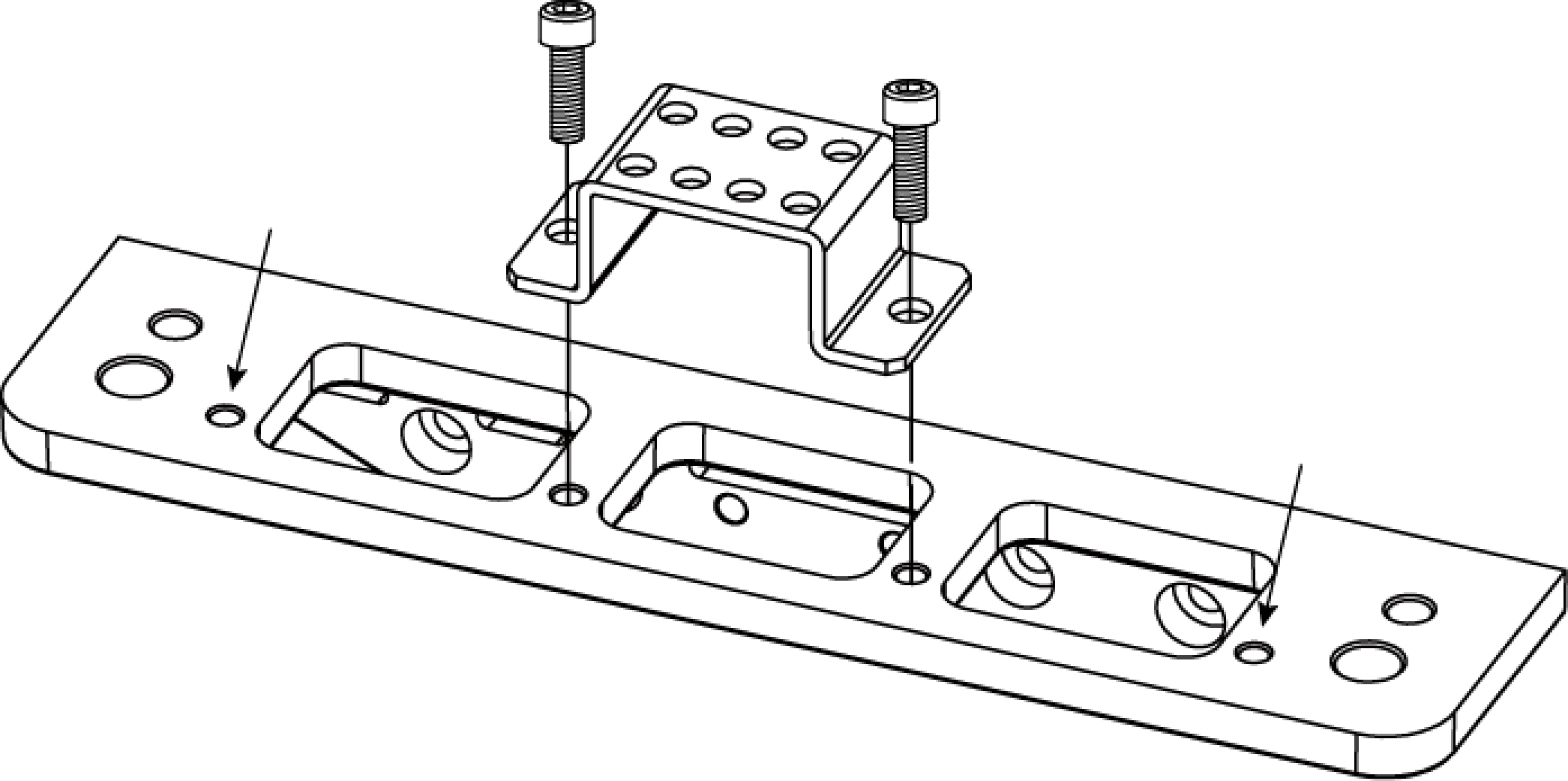
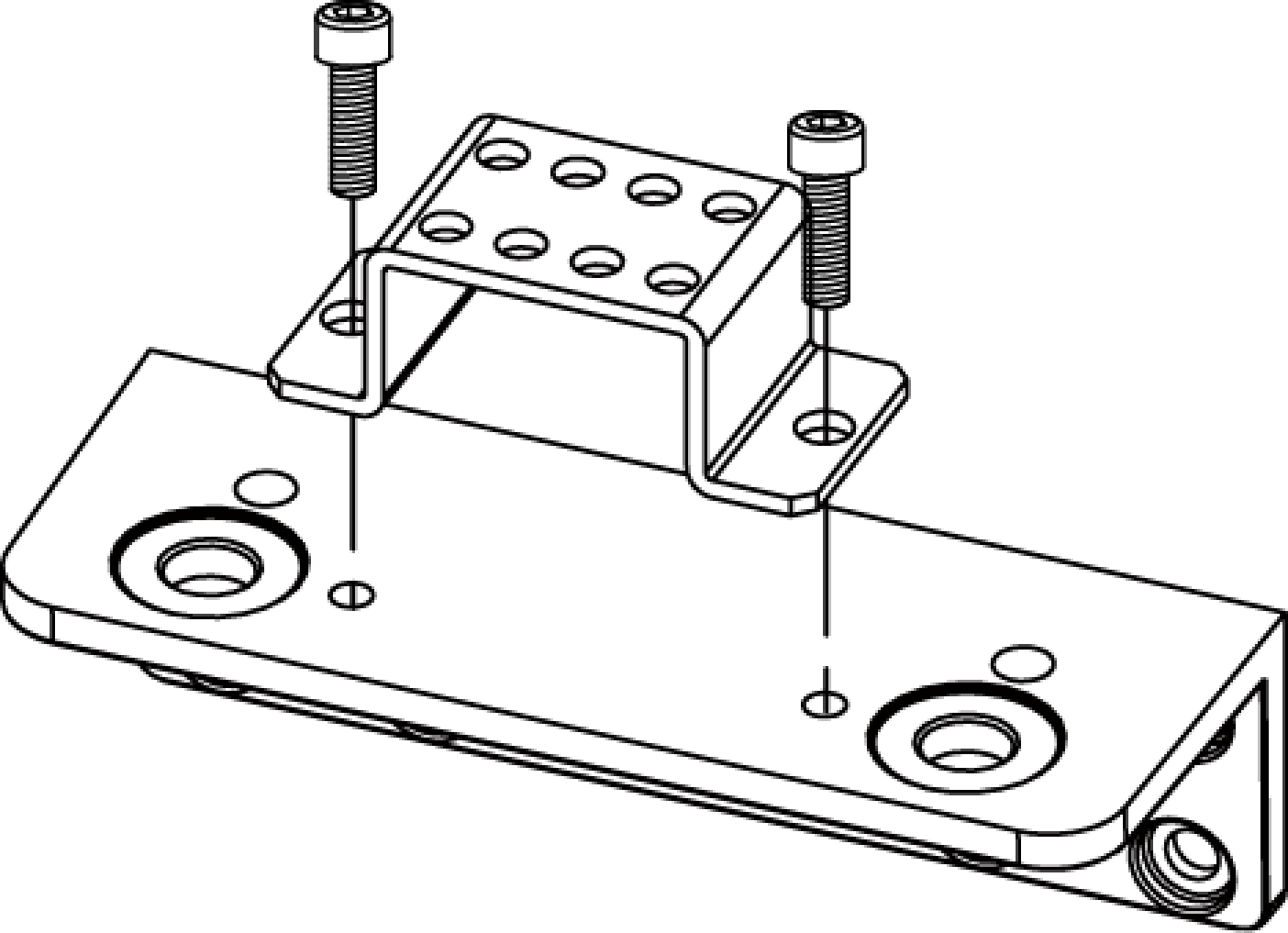
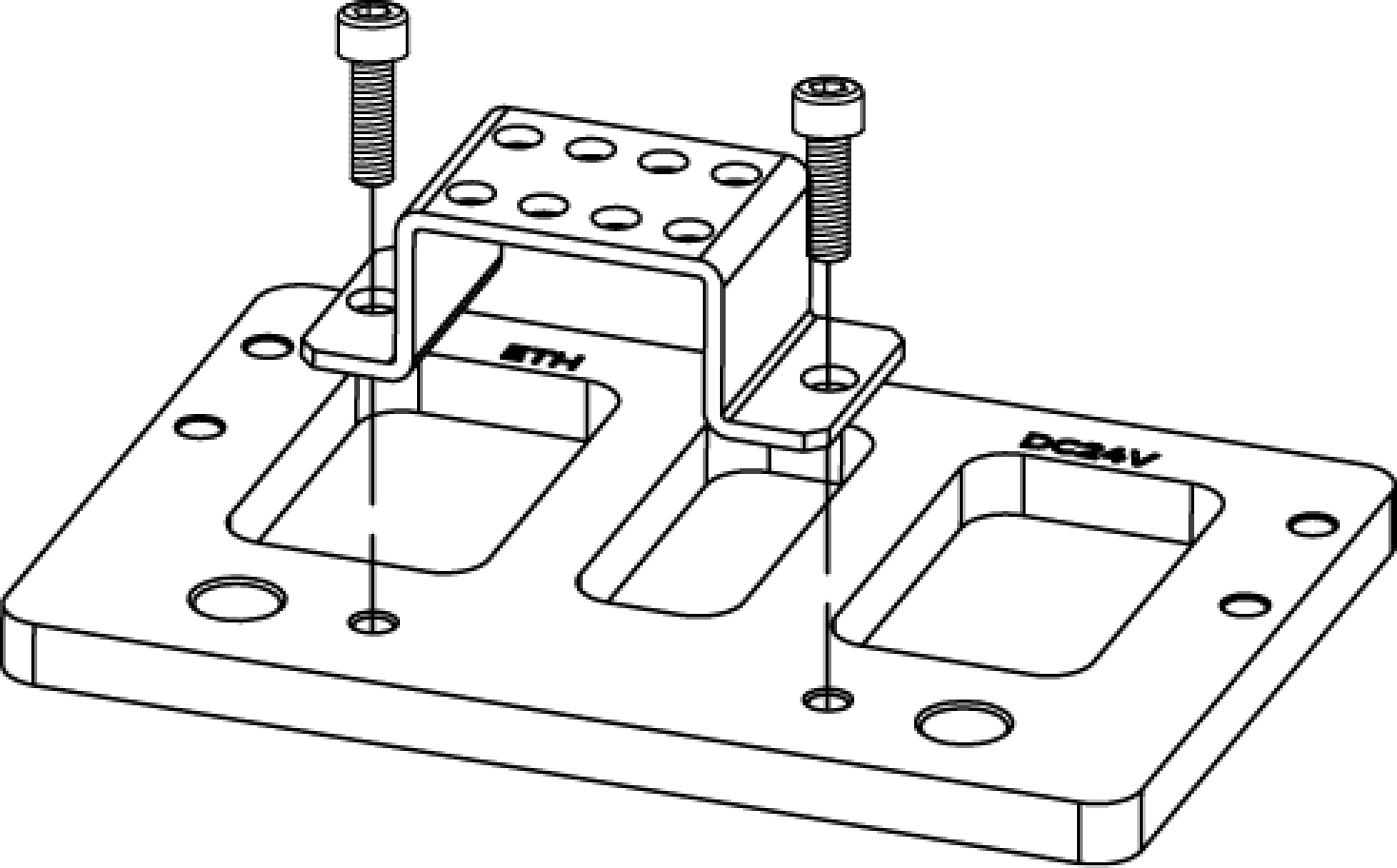
Como se muestra a continuación, use la llave hexagonal para apretar 2 tornillos de cabeza hueca M5 × 8. La torsión de apriete recomendada es de 2,2 a 2,5 N·m.
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL y UHP-140-GL: Puede usar los orificios roscados en diferentes ubicaciones (indicados por la flecha) para montar el soporte de cables.
-
NANO-GL:
-
NANO ULTRA-GL:
3.2. Montar mediante los Orificios Roscados en la Parte Posterior
|
Cuando monte LSR S-GL y NANO ULTRA-GL en este método, asegúrese de que la parte posterior de cámara esté en contacto estrecho con una superficie metálica para disipar el calor, de modo que la cámara pueda funcionar correctamente. |
-
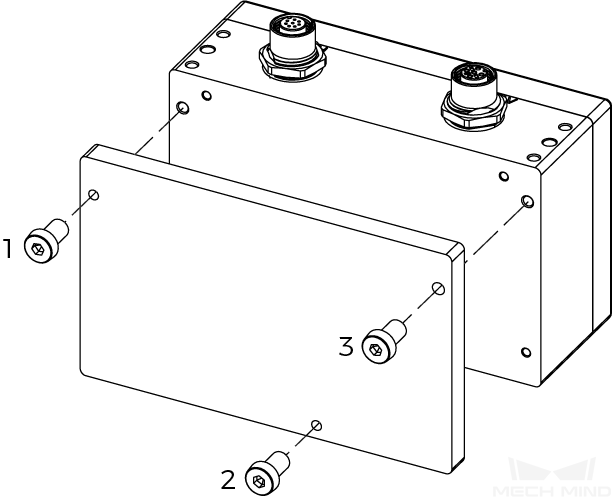
Desmonte la placa de montaje con la llave hexagonal. Es necesario desmontar el disipador de calor de LSR S-GL y NANO ULTRA-GL.
-
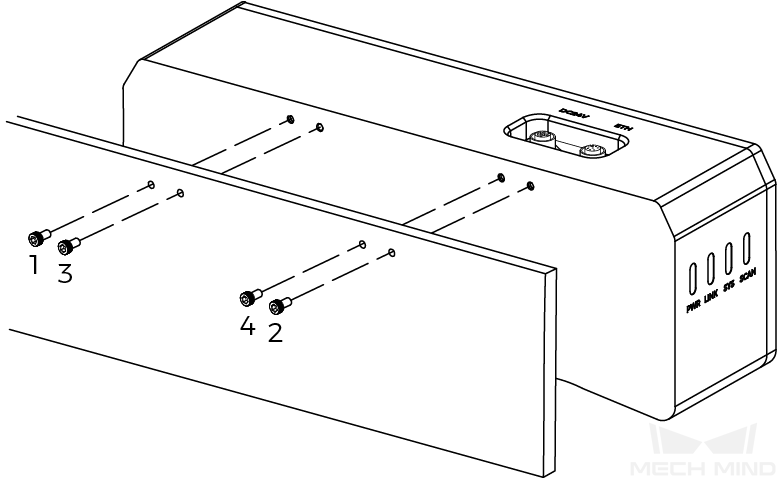
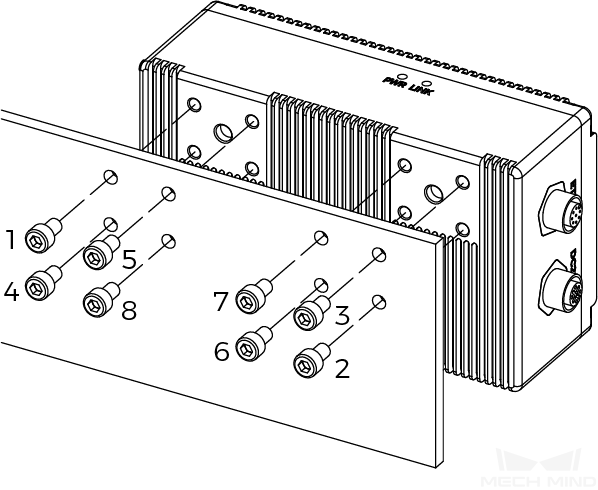
Como se muestra a continuación, coloque los tornillos de cabeza hueca de la especificación correspondiente en los orificios de montaje. A continuación, use la llave hexagonal para atornillar sin apretar los tornillos en el orden especificado y, luego, apriete completamente todos los tornillos en el orden especificado.
-
NANO ULTRA-GL: Tornillos de cabeza hueca M4 × 8 (torsión de apriete recomendada: 1,4 a 1,6 N·m)
-
Otros modelos: Tornillos de cabeza hueca M5 × 8 (torsión de apriete recomendada: 2,2 a 2,5N·m)
La cantidad necesaria de tornillos varía según el modelo.
-
-
DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL y UHP-140-GL:
-
NANO-GL:
-
NANO ULTRA-GL:
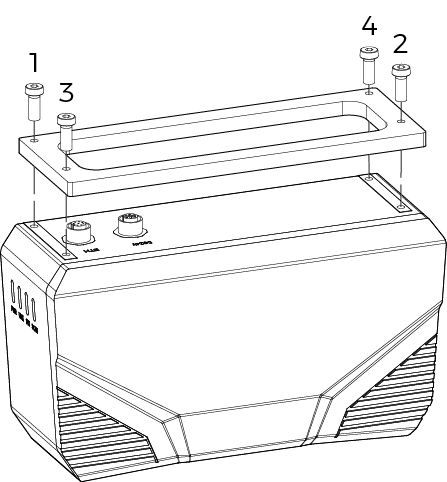
3.3. Montar mediante los Orificios Roscados en la Parte Superior
Los siguientes modelos proporcionan orificios roscados en la parte superior: LSR S-GL, LSR XL-GL, NANO ULTRA-GL y UHP-140-GL.
-
Desmonte la placa de montaje con la llave hexagonal.
-
Como se muestra a continuación, coloque los tornillos de cabeza hueca de la especificación correspondiente en los orificios de montaje. A continuación, use la llave hexagonal para atornillar sin apretar los tornillos en el orden especificado y, luego, apriete completamente todos los tornillos en el orden especificado.
-
NANO ULTRA-GL: Tornillos de cabeza hueca M4 × 8 (torsión de apriete recomendada: 1,4 a 1,6 N·m)
-
Otros modelos: Tornillos de cabeza hueca M5 × 8 (torsión de apriete recomendada: 2,2 a 2,5N·m)
-
4. Conectar los Cables
Siga los siguientes pasos para conectar el cable Ethernet y el de la alimentación de la cámara.
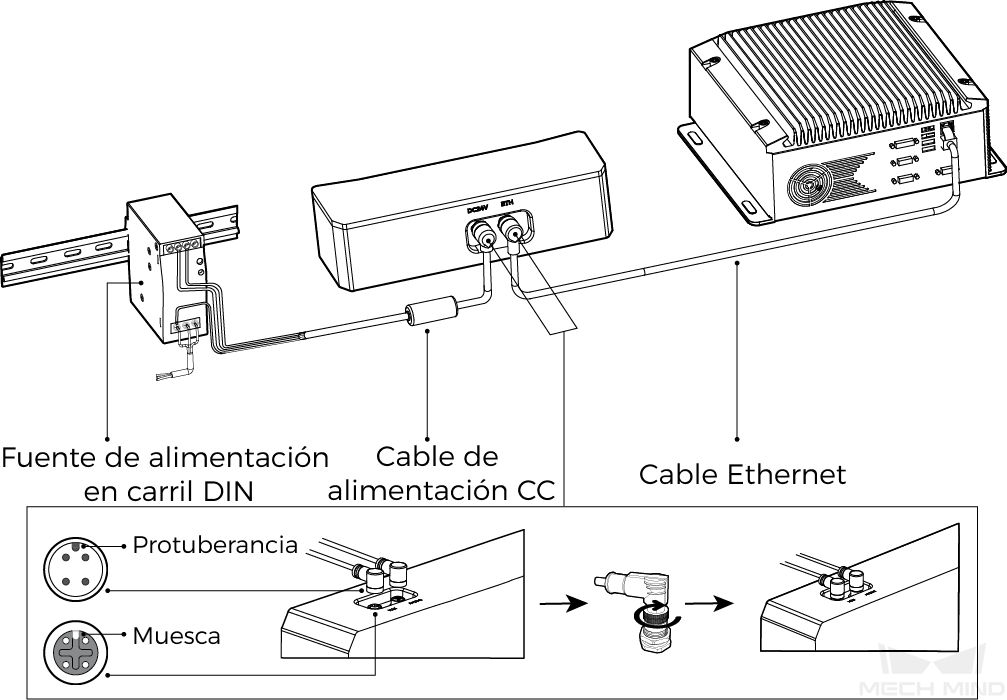
4.1. Cable Ethernet y Cable de alimentación CC
-
Cable Ethernet: Inserte el conector M12-A del cable Ethernet en el puerto ETH de la cámara y el RJ45 en el puerto Ethernet del IPC.
-
Cable de alimentación CC: Inserte el conector M12-A del cable de alimentación CC en el puerto de alimentación DC 24V de la cámara.
Cuando inserta el cable Ethernet y el cable de alimentación CC:
-
Durante la inserción, alinee la protuberancia del conector con la muesca del puerto.
-
Apriete la tuerca. La torsión de apriete recomendada para los tornillos es de 0,7 N·m. Queda un hueco de unos 2 mm después de apretar la tuerca completamente.
|
4.2. Fuente de Alimentación en Carril DIN
|
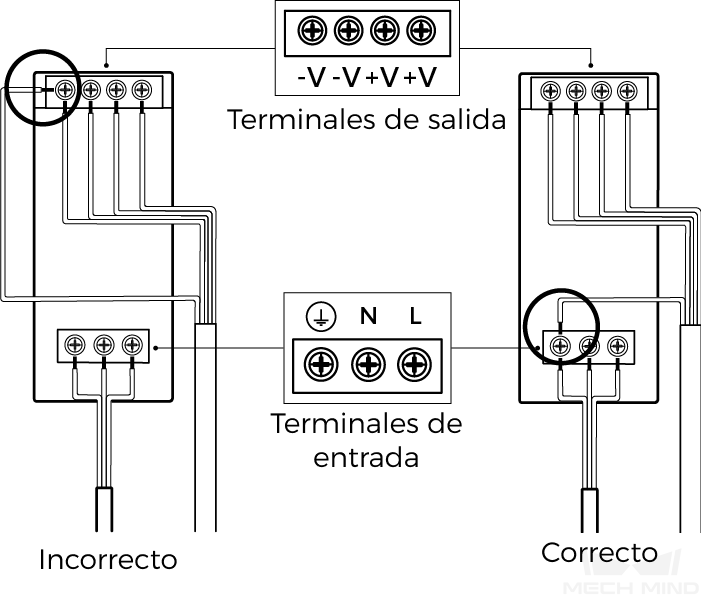
-
Use el destornillador plano para aflojar los tornillos sobre los terminales de la fuente de alimentación en Carril DIN.
-
Conecte el cable de alimentación CC: Inserte los dos alambres con signo +V en los dos terminales de salida con signo +V respectivamente, los alambre -V en los dos terminales de salida con signos -V, y el alambre con signo PE en el terminal de tierra (
 ).
). -
Conecte el cable de alimentación CA: Inserte el cable de corriente en el terminal de entrada L de la fuente de alimentación en carril DIN, el cable neutro en el terminal de entrada N y el cable de tierra en el terminal de tierra (
). -
Use el destornillador plano para apretar los tornillos en los terminales.
|
5. Calentamiento
Para garantizar que la precisión de los datos adquiridos por el producto alcance los valores indicados en las especificaciones técnicas, caliente el dispositivo con la Herramienta de Calentamiento antes de usarlo.
-
Tiempo de calentamiento recomendado: 60 minutos para UHP-140-GL y LSR S-GL, y 30 minutos para otros modelos.
-
Intervalo de adquisición de datos recomendado: Use el intervalo de adquisición de datos actualmente en uso para el calentamiento del producto. Si el intervalo de adquisición de datos actualmente en uso no es fijo, se recomienda calentar el producto con el intervalo promedio. Por ejemplo, si actualmente adquiere datos cada 6 a 10 segundos, se recomienda adquirir datos cada 8 segundos durante el calentamiento.
Se han finalizado del montaje y la conexión del hardware de la cámara. Las siguientes secciones describen cómo usar Mech-Eye Viewer para conectar la cámara y adquirir datos.
6. Descargar e Instalar Mech-Eye SDK
Descargue el paquete de instalación de Mech-Eye SDK en el Área de Descargas de Mech-Mind.
Después de descomprimir el paquete de instalación, haga doble clic para instalar Mech-Eye SDK. Para obtener más información, consulte el capítulo Manual de Instalación de Mech-Eye SDK.
7. Ajustar la Dirección IP
Antes de conectar la cámara, asegúrese de que las dos direcciones IP sean únicas y estén en la misma subred.
-
Dirección IP de la cámara
-
Dirección IP del puerto de Ethernet de la computadora conectado a la cámara
Siga los siguientes pasos para ajustar la dirección IP de la cámara:
-
Haga doble clic para abrir Mech-Eye Viewer.
-
Seleccione la cámara por conectar, y haga clic en
 .
.
8. Conectar la Cámara
-
Seleccione la cámara por conectar en Mech-Eye Viewer, y haga clic en el botón Conectar.
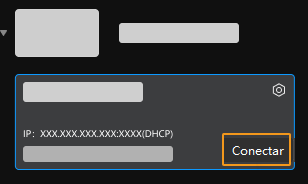
|
Si el software o firmware se necesita actualizar, se visualiza el botón Actualizar en su lugar. Haga clic en este botón para realizar la actualización primero, y conecte la cámara. |
9. Adquirir Datos
Haga clic en ![]() para adquirir datos de una vez.
para adquirir datos de una vez.
|
Haga clic en |
Haga clic en los tipos de datos debajo del botón adquirir para revisar la imagen 2D, el mapa de profundidad y la nube de puntos.
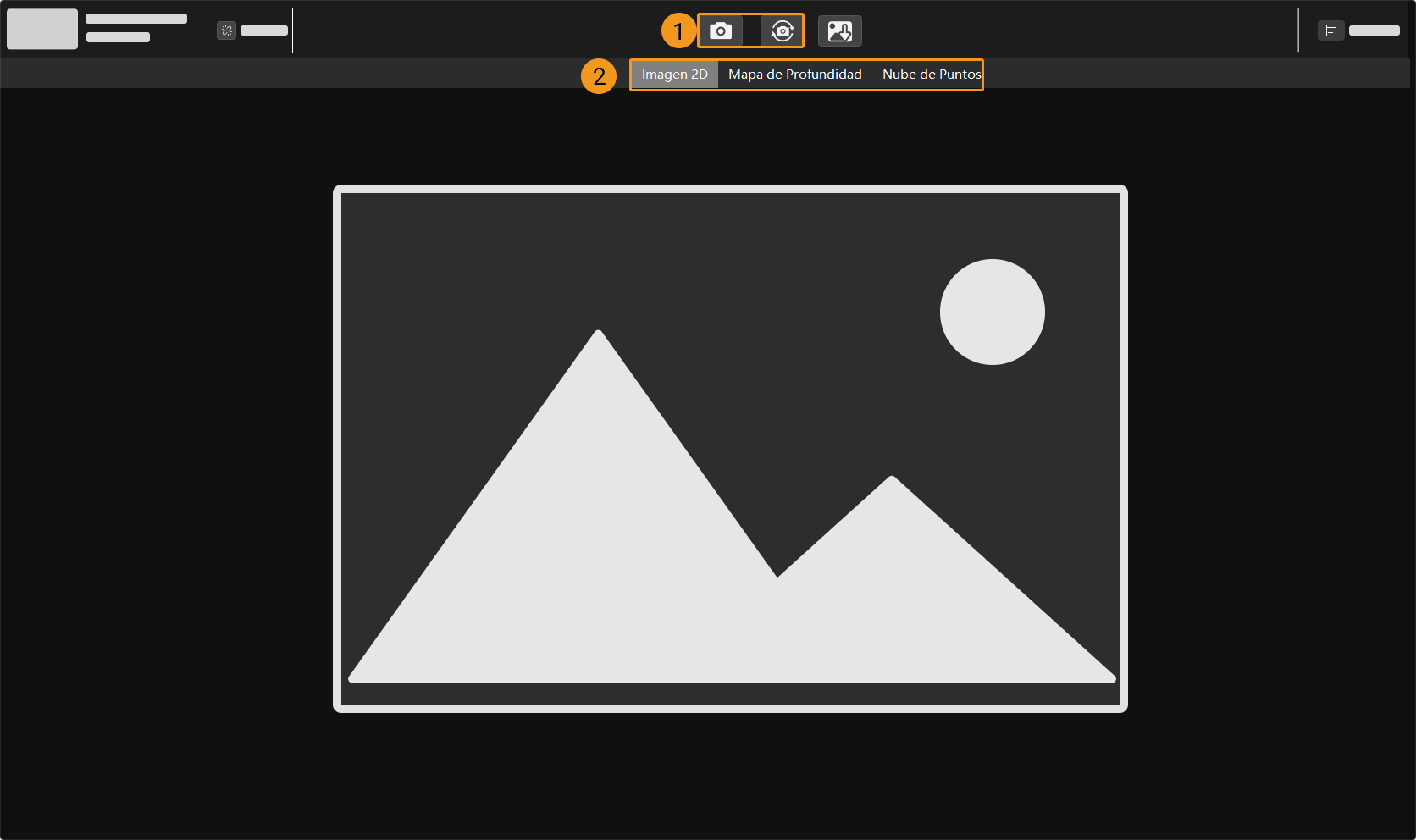
| Para obtener más información sobre la adquisición de datos y los tipos de datos, consulte el capítulo Adquirir y Revisar Datos. |
10. Ajustar los Parámetros
Si la calidad de la imagen 2D, el mapa de profundidad o la nube de puntos adquiridos no es satisfactoria, puede ajustar los parámetros correspondientes en la pestaña de parámetros ubicado en la derecha del software.
10.1. Revisar la Calidad de los Datos
Revise preliminarmente la calidad de los datos según los siguientes requisitos.
-
Imagen 2D: La imagen 2D no debe estar ni demasiado brillante ni oscura para que puedan ver las características de la superficie del objeto.
Demasiado oscura Adecuada Demasiado brillante 

-
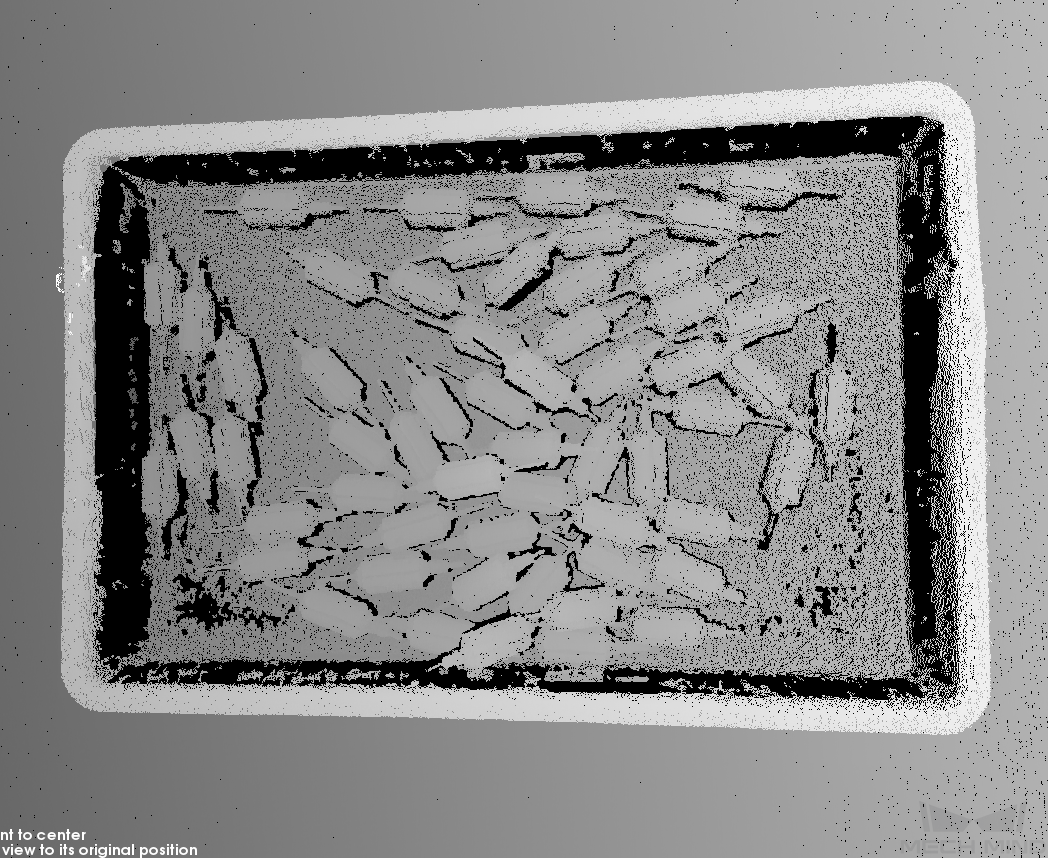
Mapa de profundidad y nube de puntos: Los datos correspondientes al objeto deben ser completos. El objeto de los ejemplos de abajo es rotor.
La nube de puntos del rotor está incompleta La nube de puntos del rotor está completa 
10.2. Mejorar la Calidad de Imagen 2D
-
Ajuste el parámetro Modo de Exposición de la categoría de Parámetros 2D a Fija, y ajuste el parámetro Tiempo de Exposición.
-
Si la imagen 2D está demasiado oscura, aumente el Tiempo de Exposición.
-
Si la imagen 2D está demasiado brillante, reduzca el Tiempo de Exposición.
DEEP-GL y LSR proporcionan dos tipos de imágenes 2D, que corresponden a diferentes parámetros. Para obtener más detalles, consulte Parámetros de series DEEP-GL y Parámetros de series LSR.
-
-
Adquiera de nuevo los datos y revise la calidad de la imagen 2D.
10.3. Mejorar la Calidad de Mapa de Profundidad y Nube de Puntos
-
Ajuste Tiempo de Exposición de la categoría de Parámetro 3D.
-
Si el objeto es bastante oscuro o menos reflectante, aumente el Tiempo de Exposición.
-
Si el objeto es bastante claro o más reflectante, reduzca el Tiempo de Exposición.
-
-
Adquiera de nuevo los datos y revise la calidad de mapa de profundidad y nube de puntos.
| Para obtener más información, consulte el capítulo Asistente de Referencia de Parámetros. |
11. Usar Datos
Puede guardar la imagen 2D, el mapa de profundidad y la nube de puntos obtenidos por Mech-Eye Viewer en su computadora, o usarlos para el procesamiento y cálculo posteriores mediante Mech-Vision o software de visión artificial de terceros.
-
Guarde los datos: Haga clic en
 de panel de adquisición de datos para ajustar la ruta para guardar datos, marque el tipo de datos y haga clic en el botón Guardar.
de panel de adquisición de datos para ajustar la ruta para guardar datos, marque el tipo de datos y haga clic en el botón Guardar. -
Use los datos en Mech-Vision: Consulte el capítulo Tutorial del Sistema de Visión para aprender a crear un sistema de visión completo que incluya Mech-Vision.
-
Use los datos en software de visión artificial de terceros: Puede transmitir los datos adquiridos por la cámara a software de terceros mediante Mech-Eye API o el puerto de GenICam.