Parámetros de NANO ULTRA-GL
Este capítulo presenta los parámetros de las cámaras NANO ULTRA-GL. Los parámetros se dividen en parámetros que afectan la imagen 2D y parámetros que afectan el mapa de profundidad o la nube de puntos, según los tipos de datos afectados por ellos.
Resumen
Las categorías de parámetros que afectan la calidad de imagen 2D, el mapa de profundidad y la nube de puntos son las siguientes:
| Categoría de parámetros | Imagen 2D | Mapa de profundidad | Nube de puntos |
|---|---|---|---|
|
|||
(1) |
|
|
|
|
|||
|
|
||
|
|
(1) La calidad de la imagen 2D (fuente de profundidad) puede verse afectada por el parámetro Ganancia en la categoría de Parámetros 3D.
El objetivo de ajustar los parámetros es obtener la imagen 2D, el mapa de profundidad y la nube de puntos de alta calidad, los criterios son los siguientes:
-
La imagen 2D no debe estar ni demasiado brillante ni oscura para que puedan ver las características de la superficie del objeto.
Cuando usa una cámara en color, si el color de imagen difiere significativamente del de los objetos por la iluminación de la escena, ajuste el balance de blancos. Para obtener instrucciones detalladas, consulte la sección Ajustar el Balance de Blancos. -
En el mapa de profundidad y la nube de puntos, los datos necesarios deben estar completos.
Determine qué parte de los datos son necesarios según sus demandas reales. Por ejemplo, si desea agarrar boles metálicos con la apertura hacia arriba desde el borde, normalmente solo necesita asegurarse de que los datos del borde de los boles estén completos.
1. Parámetros 2D
1.1. Modo de Exposición
Descripción de parámetro |
Ajusta el modo de exposición para capturar imagen 2D. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
|
Instrucciones |
Al seleccionar diferentes opciones, se visualizan diferentes parámetros en la categoría de Parámetros 2D para el ajuste:
|
1.1.1. Fija: Tiempo de Exposición
Descripción de parámetro |
Afecta el brillo de la imagen.
|
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
0,1 a 999 ms |
Instrucciones |
Ajuste este parámetro según la calidad de la imagen 2D. La imagen 2D no debe estar ni demasiado brillante ni oscura para que puedan ver las características de la superficie del objeto.
|
Imágenes 2D obtenidas con diferentes valores de Tiempo de Exposición (todas las otras condiciones son idénticas):
| 5 ms | 90 ms | 500 ms |
|---|---|---|
|
|
|

1.1.2. Auto: Valor de Escala de Grises
Descripción de parámetro |
Afecta el brillo de la imagen 2D. Aumenta el valor de grises cuando la imagen está demasiado oscura, y reduce cuando la imagen está demasiado brillante. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
0 a 255 |
Instrucciones |
Nada |
Imágenes 2D obtenidas con diferentes valores de Valor de Escala de Grises (todas las otras condiciones son idénticas):
| 50 | 100 | 150 |
|---|---|---|
|
|
|



| El Valor de Escala de Grises de una imagen en blanco y negro equivale al brillo de la imagen, y el Valor de Grises de una imagen en color equivale al brillo de cada canal de color. |
1.1.3. Auto: ROI de Auto-Exposición
Descripción de parámetro |
|
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
Nada |
Instrucciones |
Para obtener instrucciones más detalladas, consulte la sección Ajustar ROI de Auto-Exposición abajo. |
Imágenes 2D capturadas con diferentes valores de ROI de Auto-Exposición (todas las otras condiciones son idénticas):
| ROI de Auto-Exposición | Imagen 2D |
|---|---|
|
|
|
|
|
|




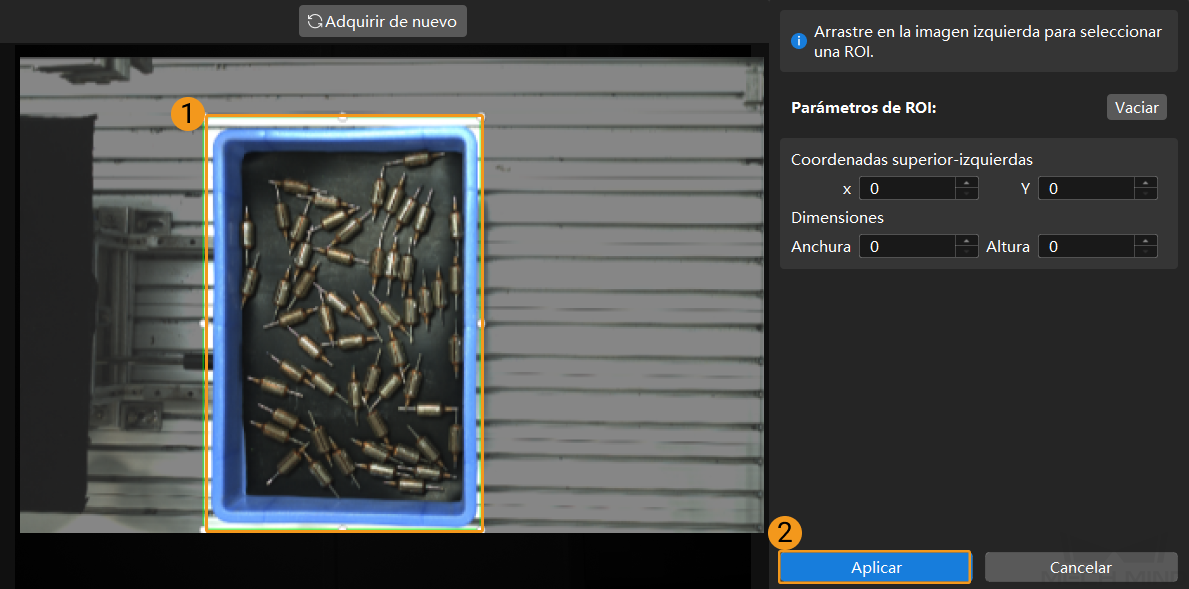
Ajustar ROI de Auto-Exposición
-
Haga clic en el botón Editar ubicado a la derecha de ROI de Auto-Exposición para visualizar la ventana de Ajustar ROI.
-
Seleccione y ajuste la ROI en la izquierda. Arrastre el cuadro de selección para moverlo y los indicadores blancos en el cuadro para ajustar dimensión del cuadro.
-
Haga clic en el botón Aplicar para aplicar la ROI de auto-exposición ajustada.
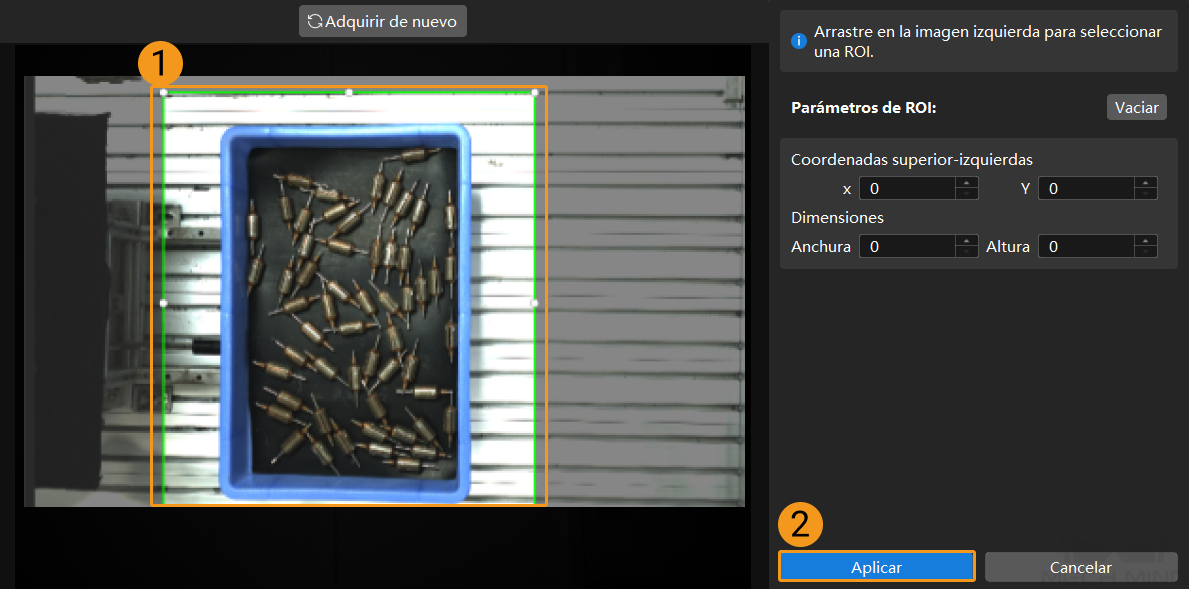
Haga clic en el botón Vaciar para eliminar la ROI de auto-exposición actual. -
Adquiera de nuevo los datos y vea la imagen 2D para revisar el resultado de ajuste de auto-exposición.
1.1.4. HDR: Mapeo de Tono
Descripción de parámetro |
Esta función puede hacer que la imagen parezca más natural. Si la imagen 2D parece muy diferente de los objetos actuales, puede activar este parámetro. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
Botón de Mapeo de Tono:
|
Imágenes 2D capturadas con el botón Mapeo de Tono activado o desactivado (todas las otras condiciones son idénticas):
| Desactivado | Activado |
|---|---|
|
|


1.1.5. HDR: Secuencia de Exposición
Descripción de parámetro |
Ajusta varios tiempos de exposición, y fusiona las imágenes capturadas para generar una imagen 2D que conserva más detalles en los destacados y las sombras. |
||
|---|---|---|---|
Visibilidad |
Principiante, Experto, Maestro |
||
Valores |
Nada |
||
Instrucciones |
|
Imágenes 2D capturadas con tiempo de exposición único (todas las otras condiciones son idénticas):
| 500 ms | 700 ms | 900 ms |
|---|---|---|
|
|
|



Imágenes 2D capturadas con diferentes secuencias de exposición que constan de los tiempos de exposición mencionados (todas las otras condiciones son idénticas):
| 500 ms & 900 ms | 500 ms & 700 ms & 900 ms |
|---|---|
|
|


1.1.6. Flash: Modo de Adquisición Flash
Descripción de parámetro |
Selecciona el modo de capturar imagen 2D cuando usa el proyector para la luz suplementaria. Para obtener más descripciones detalladas, consulte el capítulo Modo de Exposición Flash 2D. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
|
Instrucciones |
Ajuste la velocidad de adquisición y la tasa de actualización de la imagen 2D durante la adquisición continua según sus demandas reales. Al seleccionar Responsive, se visualizará el parámetro Tiempo de Exposición Flash para el ajuste. |
|
1.1.7. Flash: Tiempo de Exposición Flash
Descripción de parámetro |
Ajusta el tiempo de exposición para adquirir una imagen 2D al ajustar el Modo de Adquisición Flash a Responsive. |
||
|---|---|---|---|
Visibilidad |
Principiante, Experto, Maestro |
||
Valores |
0,1 a 99 ms |
||
Instrucciones |
Normalmente, se usa un tiempo de exposición largo en entornos oscuros , y corto en entornos luminosos.
|
1.2. Ganancia
Descripción de parámetro |
Aumenta el brillo de la imagen 2D (textura) capturada, pero puede causar más ruidos. |
||
|---|---|---|---|
Visibilidad |
Experto, Maestro |
||
Valores |
0 a 16 dB |
||
Instrucciones |
Si no puede obtener el brillo deseado mediante ajustar el Tiempo de Exposición, ajuste este parámetro.
|
Imágenes 2D obtenidas con diferentes valores de Ganancia (todas las otras condiciones son idénticas):
| 0 | 1 | 5 |
|---|---|---|
|
|
|



2. Parámetros 3D
Los parámetros en esta categoría afectan las imágenes usadas para calcular los datos de profundidad, influyendo así la calidad del mapa de profundidad y la nube de puntos.
Use el Asistente de Exposición para obtener las combinaciones de valores recomendados de parámetros de exposición. Haga clic en el botón Auto Ajustar ubicado a la derecha de Parámetros 3D para abrir la ventana de Asistente de Exposición.
2.1. Multiplicador de Exposición
Descripción de parámetro |
Ajusta el número de Tiempo de Exposición. |
||
|---|---|---|---|
Visibilidad |
Principiante, Experto, Maestro |
||
Valores |
1 a 3 |
||
Instrucciones |
|
|
Al ajustar el Modo de Codificación de Franja en la categoría de Parámetros 3D a Reflective, no se puede usar el Multiplicador de Exposición. |
2.2. Tiempo de Exposición
Descripción de parámetro |
Ajusta el tiempo de exposición para adquirir información de profundidad. El número de Tiempo de Exposición por ajustar depende del valor de Multiplicador de Exposición. |
||
|---|---|---|---|
Visibilidad |
Principiante, Experto, Maestro |
||
Valores |
|
||
Instrucciones |
|
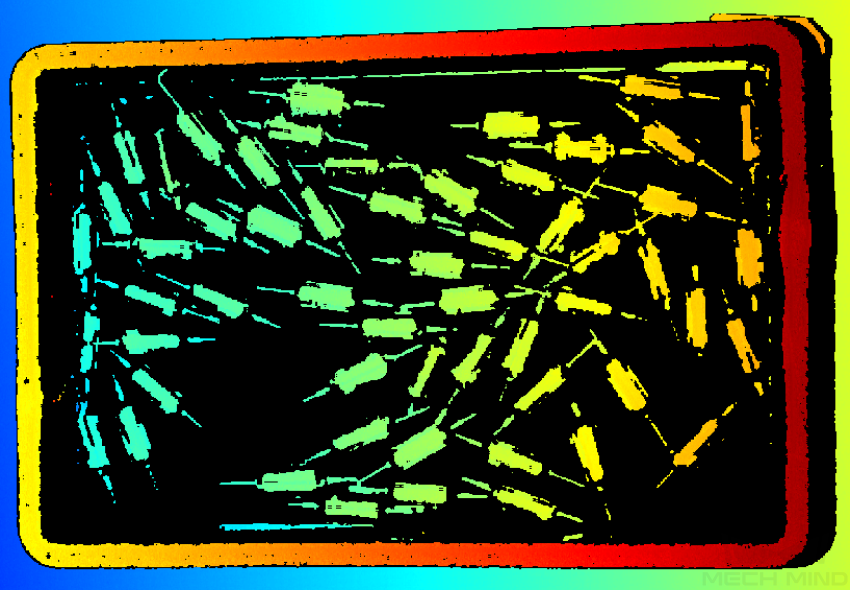
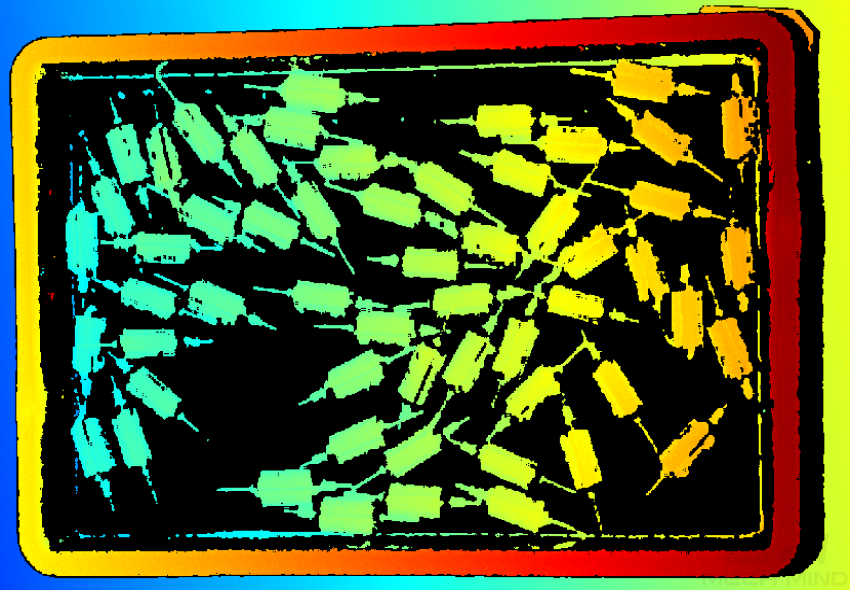
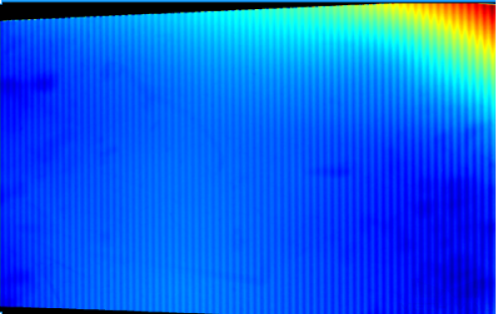
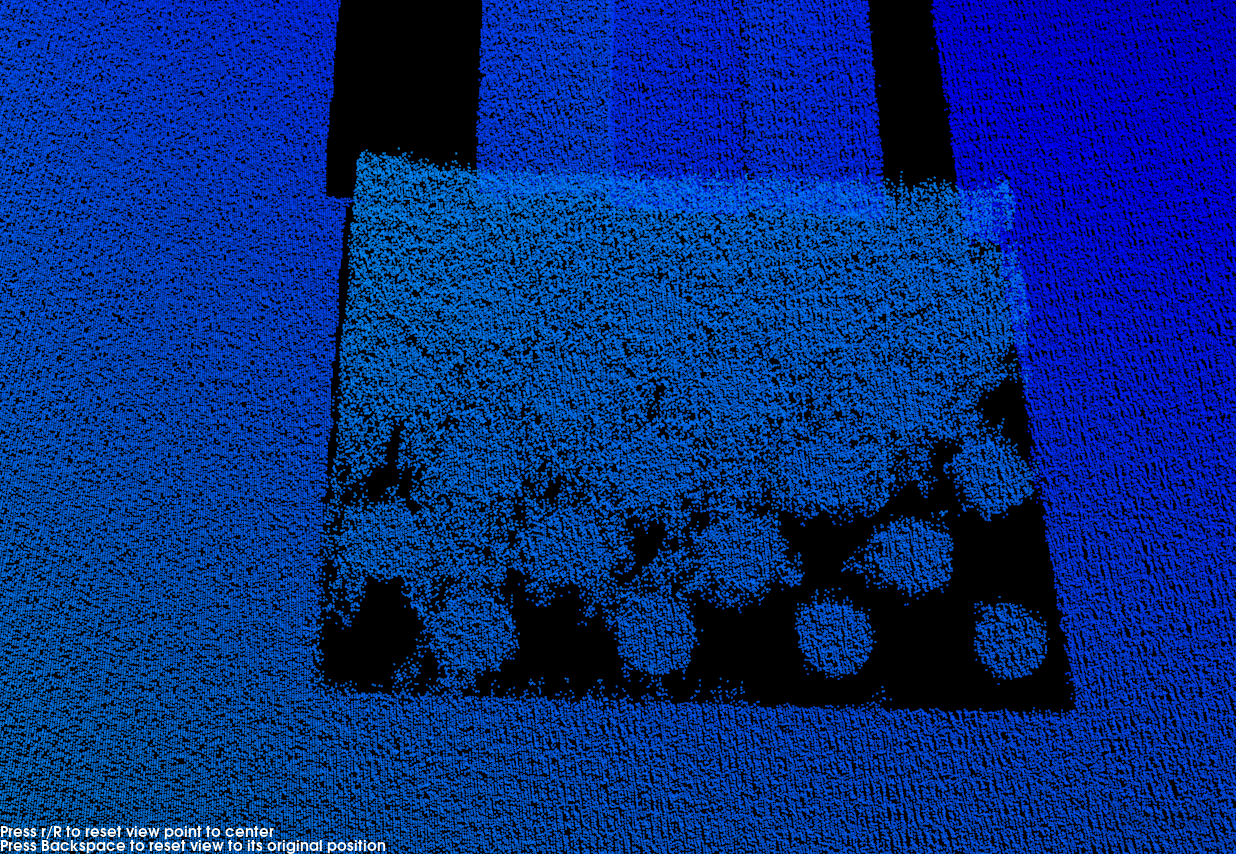
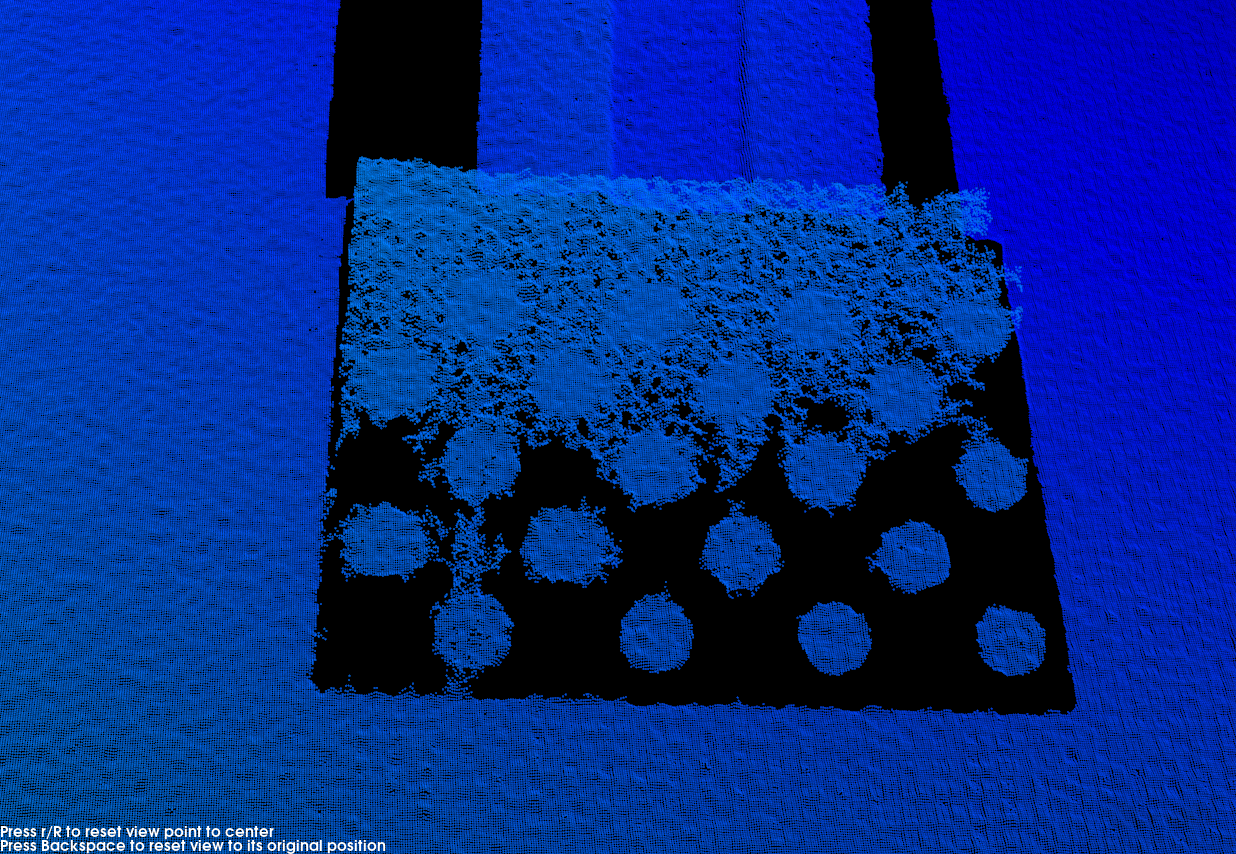
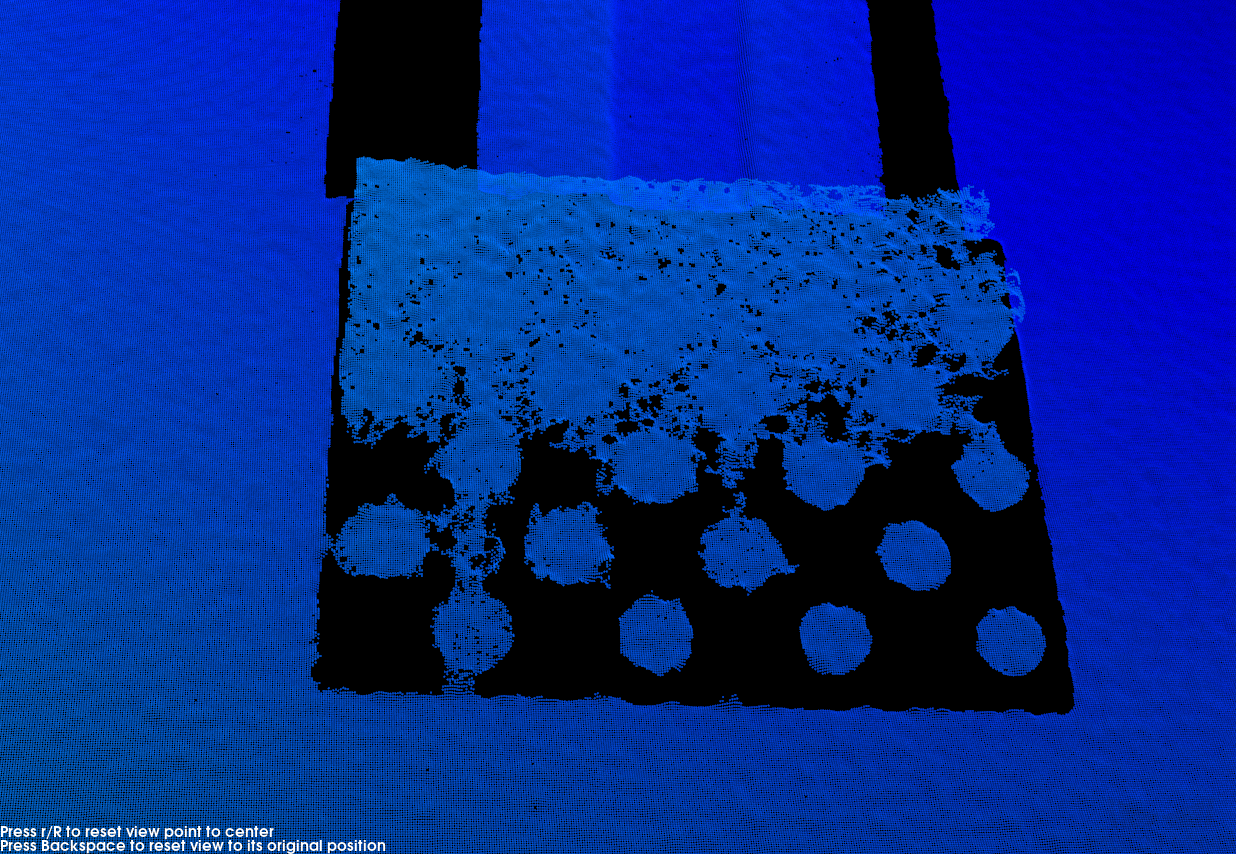
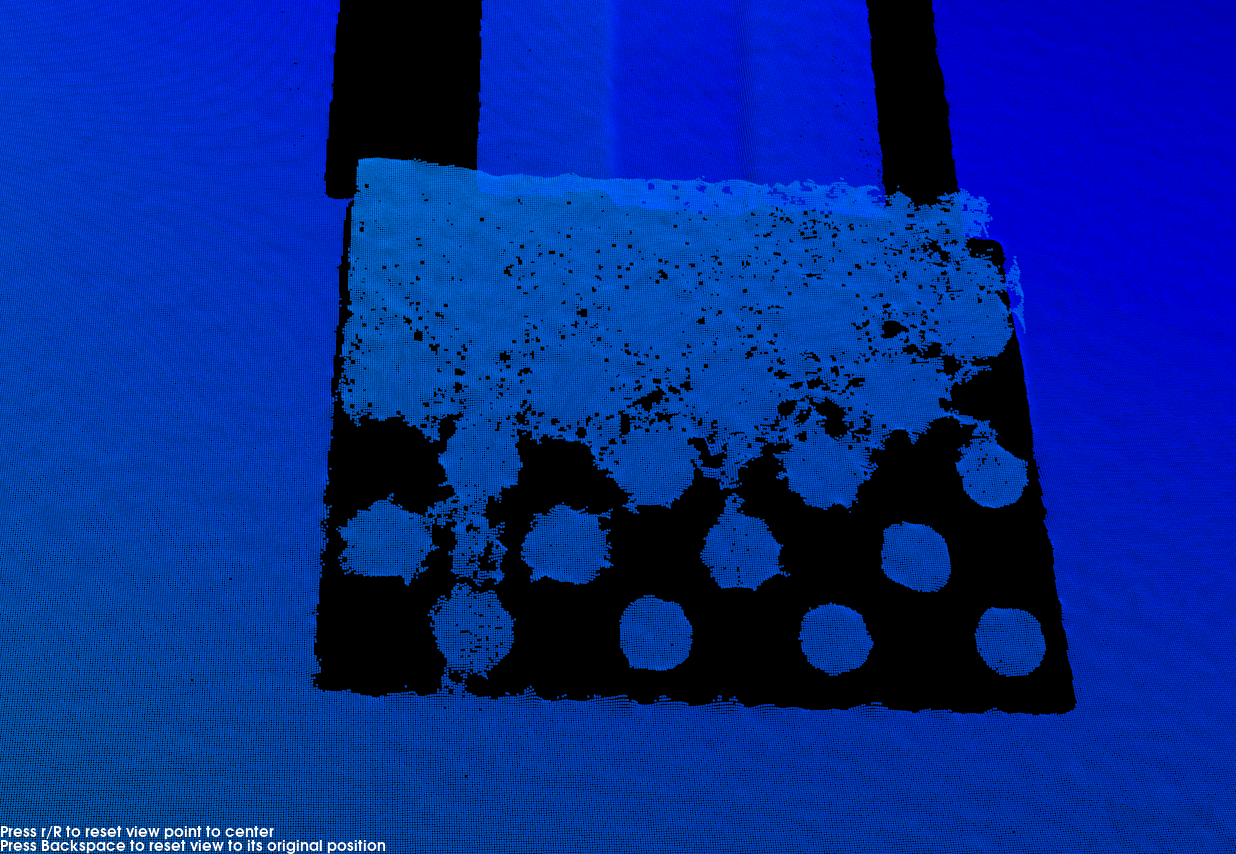
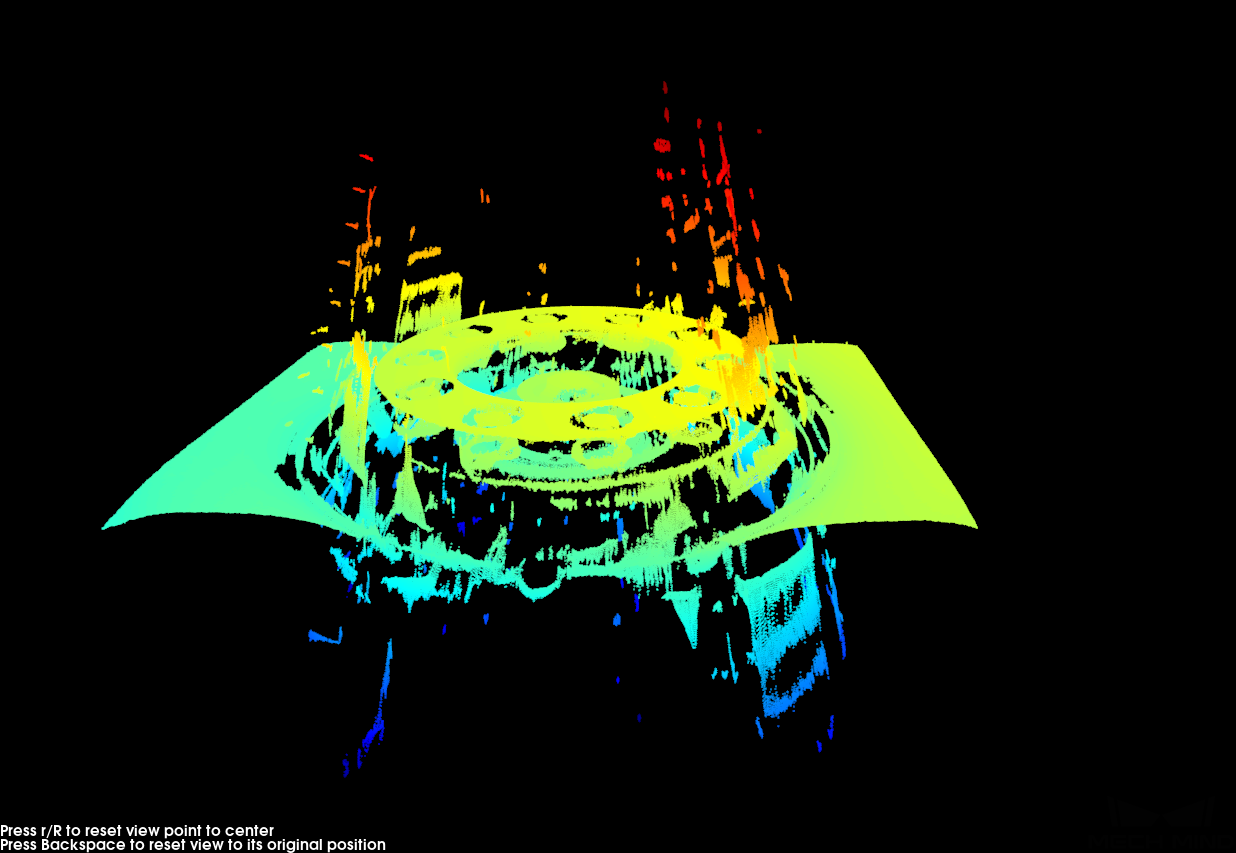
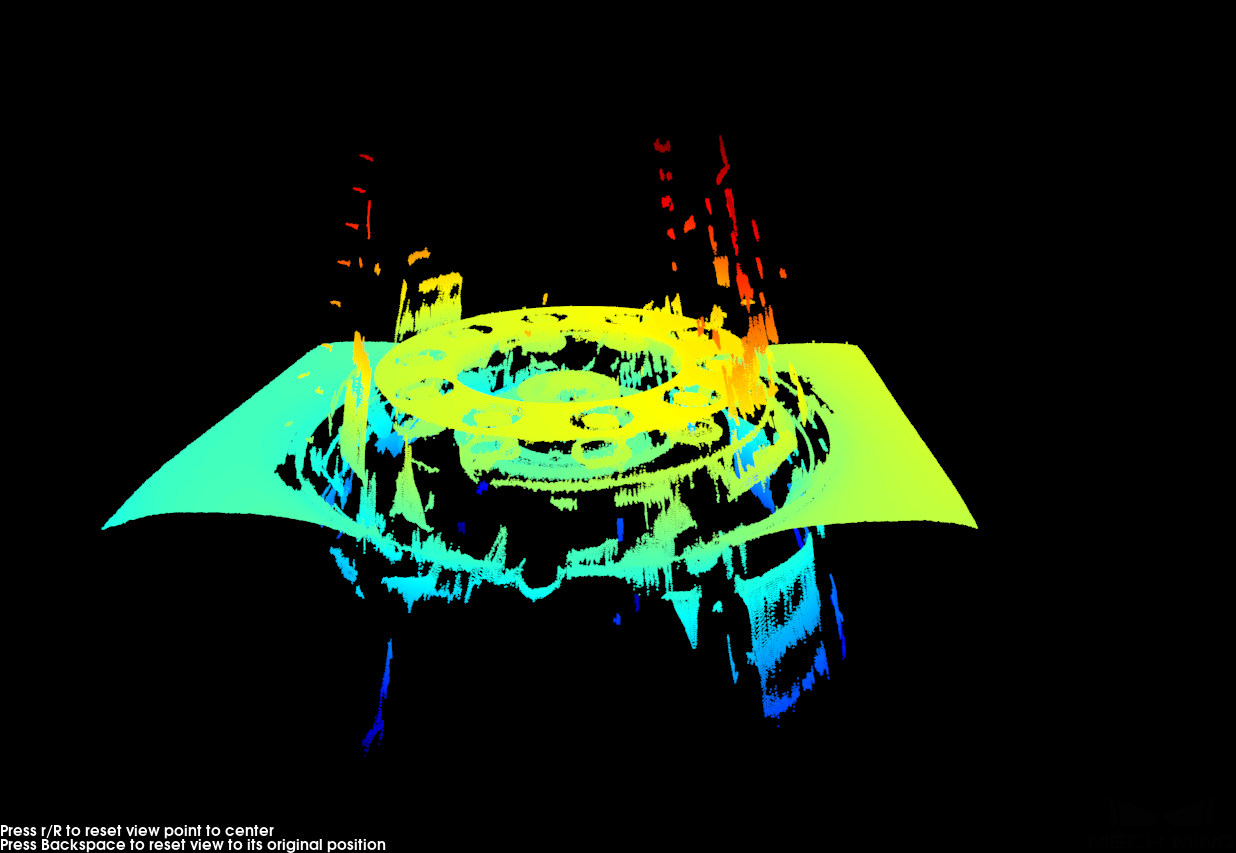
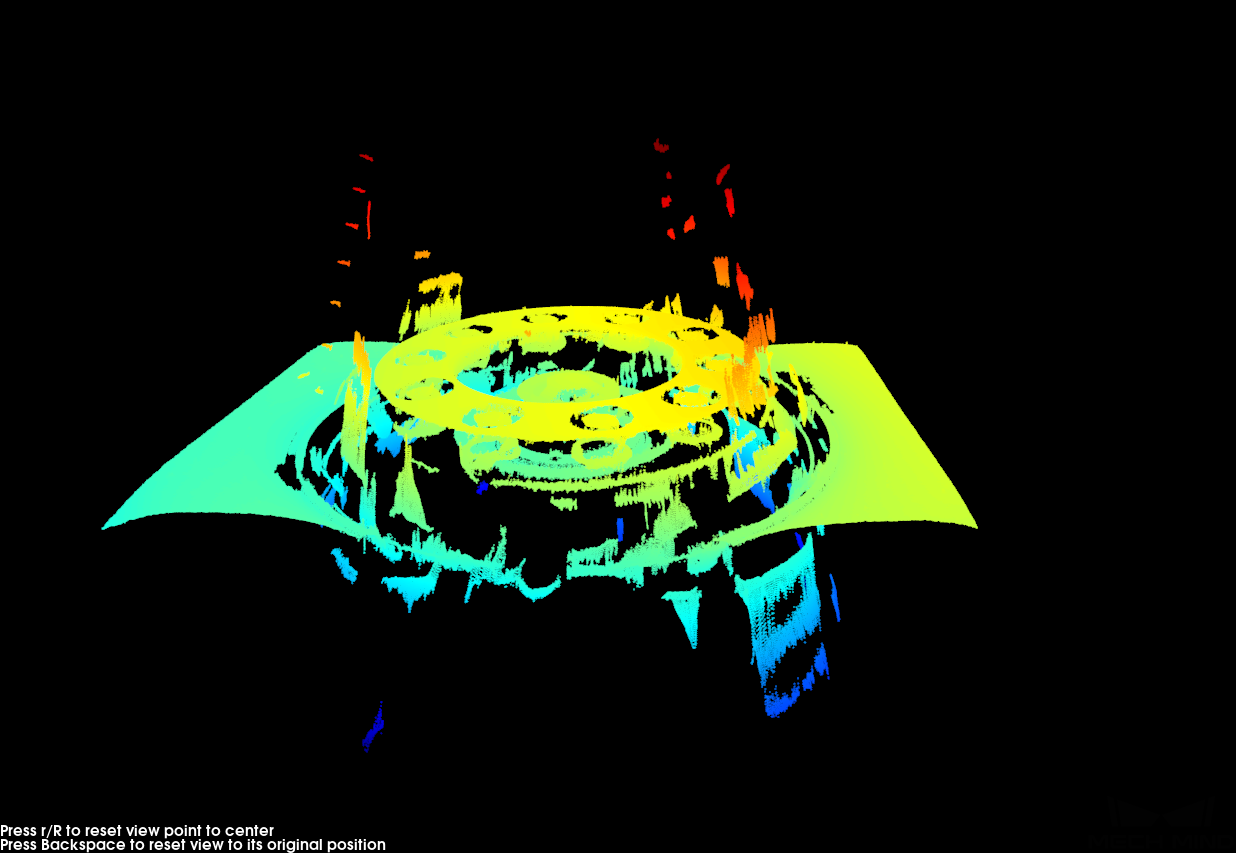
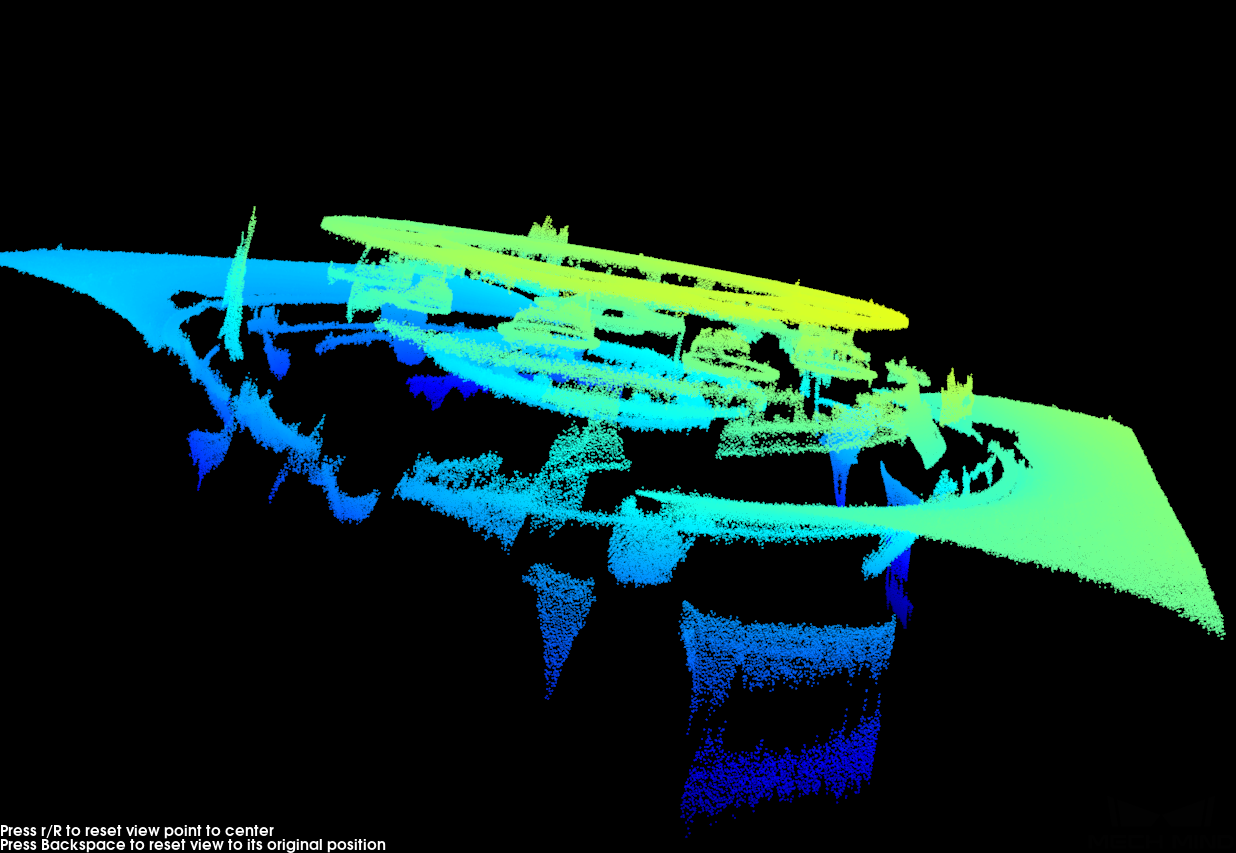
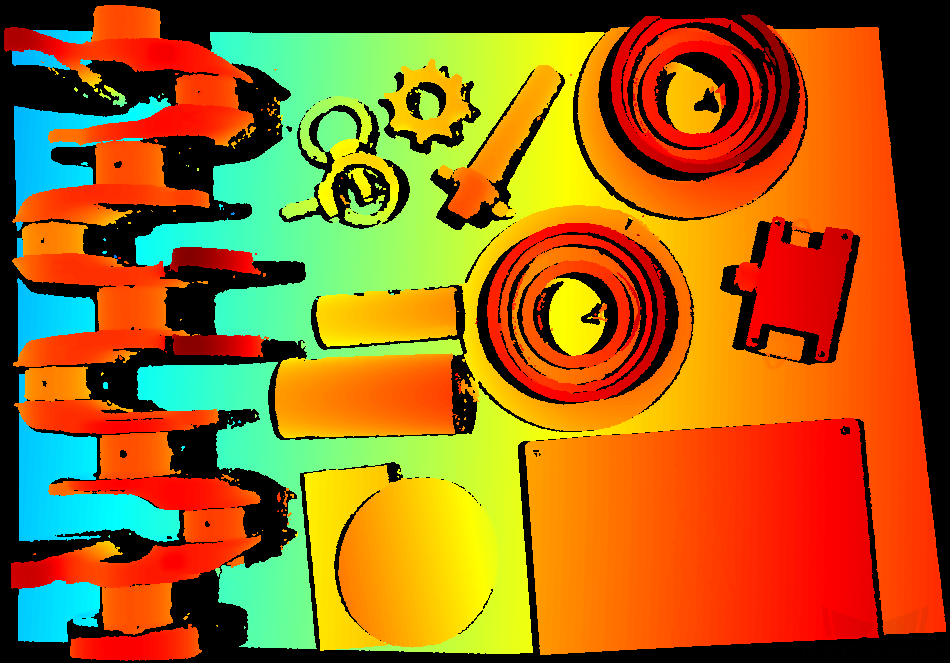
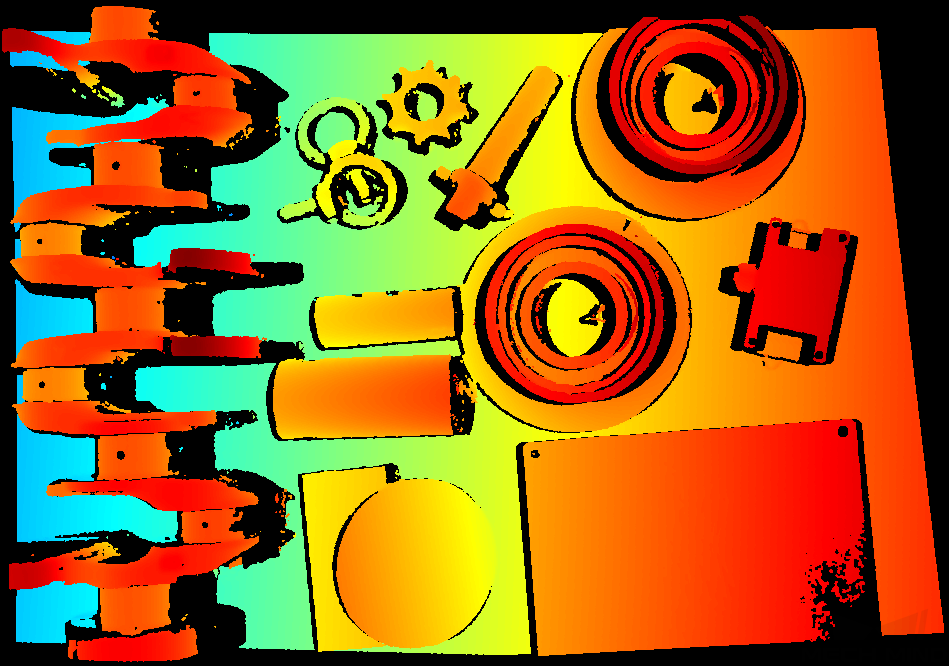
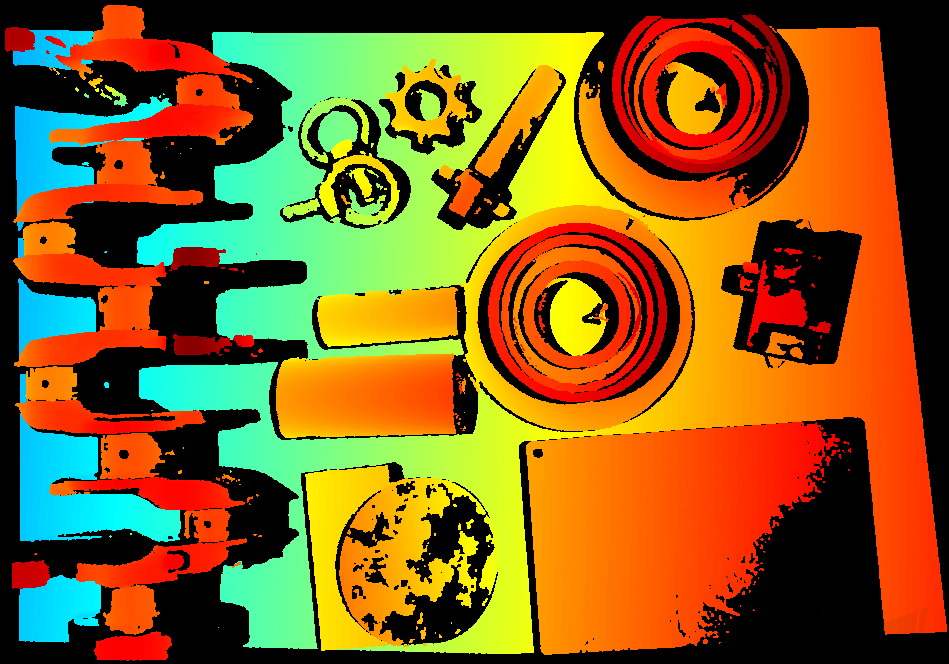
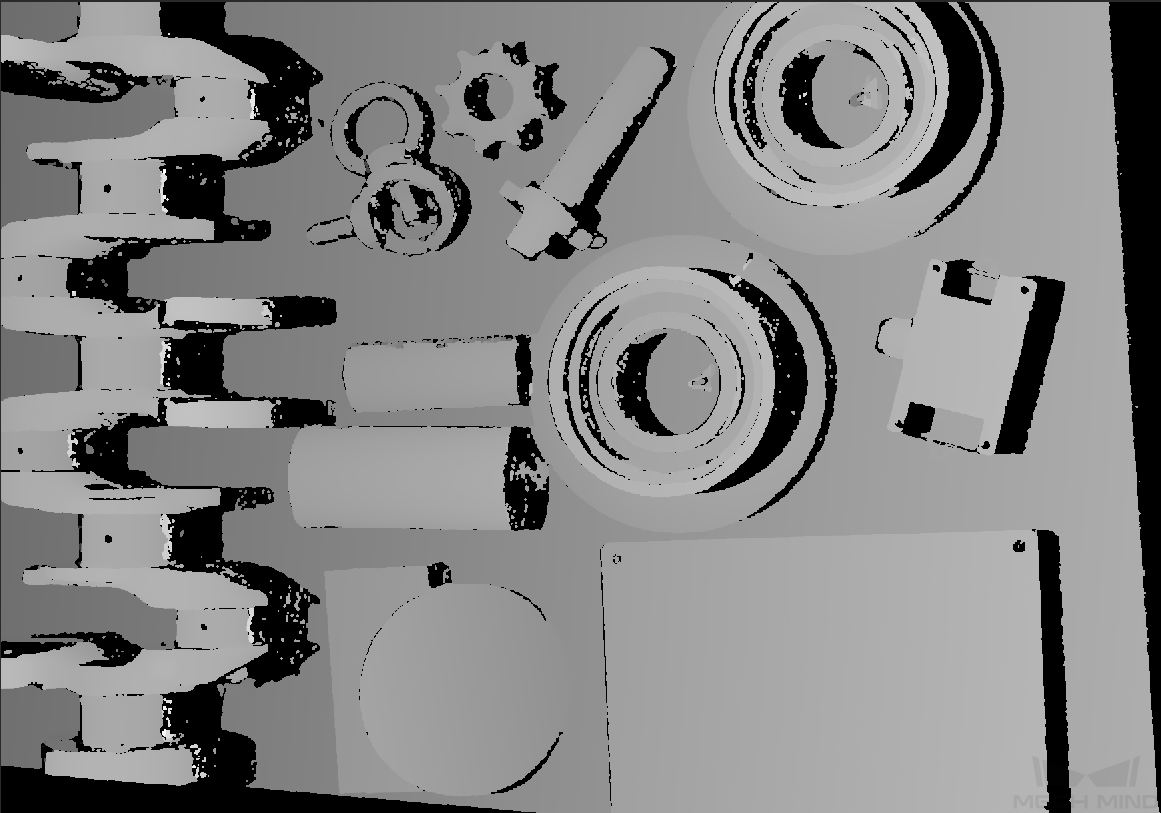
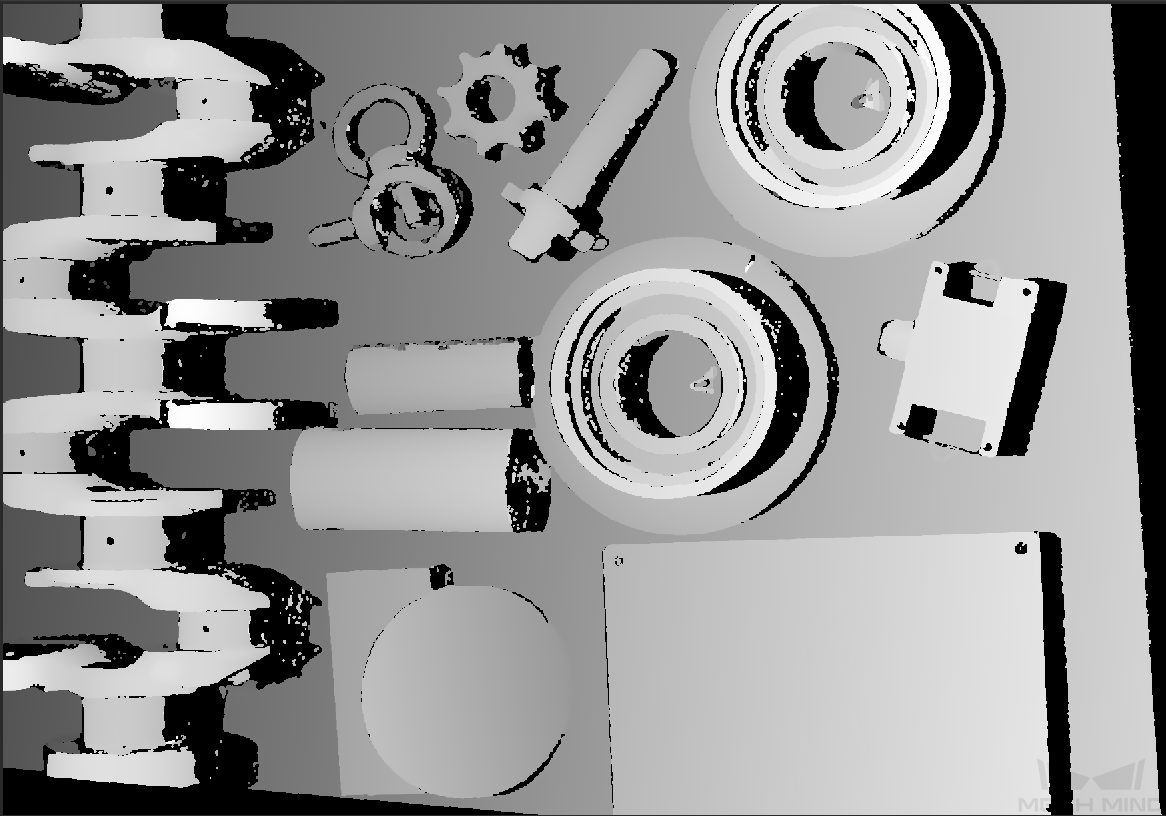
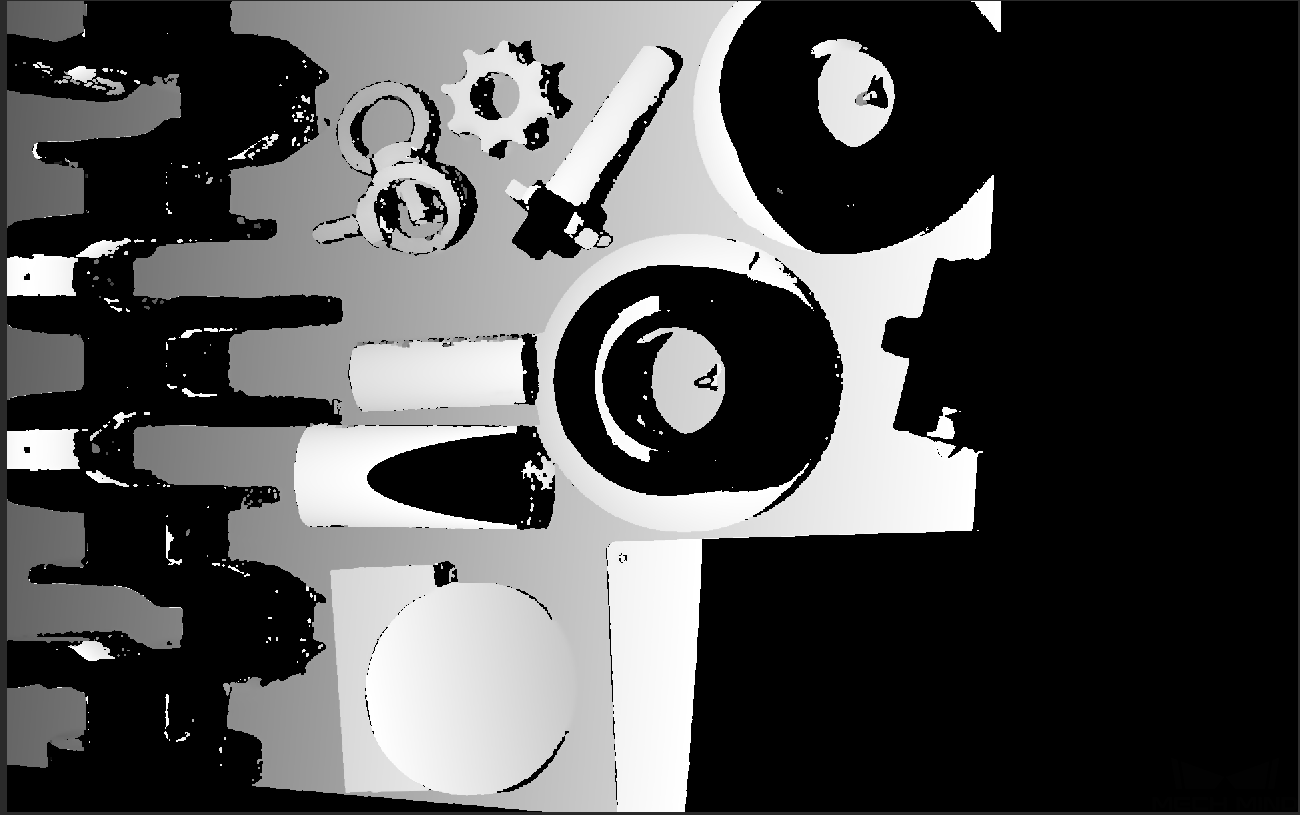
Nubes de puntos obtenidas con diferentes valores de Tiempo de Exposición (todas las otras condiciones son idénticas):
| Tiempo de Exposición 1 ms | Tiempo de Exposición 4 ms | Tiempo de Exposición 10 ms | Tiempo de Exposición 50 ms |
|---|---|---|---|
|
|
|
|

| A las áreas negras les falta información de profundidad para generar la nube de puntos correspondiente. |
2.3. Ganancia
Descripción de parámetro |
Aumenta el brillo del mapa de profundidad, pero puede causar más ruidos.
|
||
|---|---|---|---|
Visibilidad |
Experto, Maestro |
||
Valores |
0 a 16 dB |
||
Instrucciones |
Si no puede obtener el brillo deseado mediante ajustar el Tiempo de Exposición, ajuste este parámetro.
|
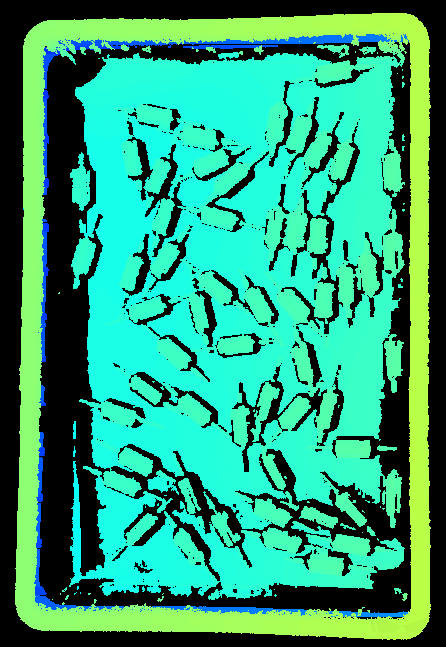
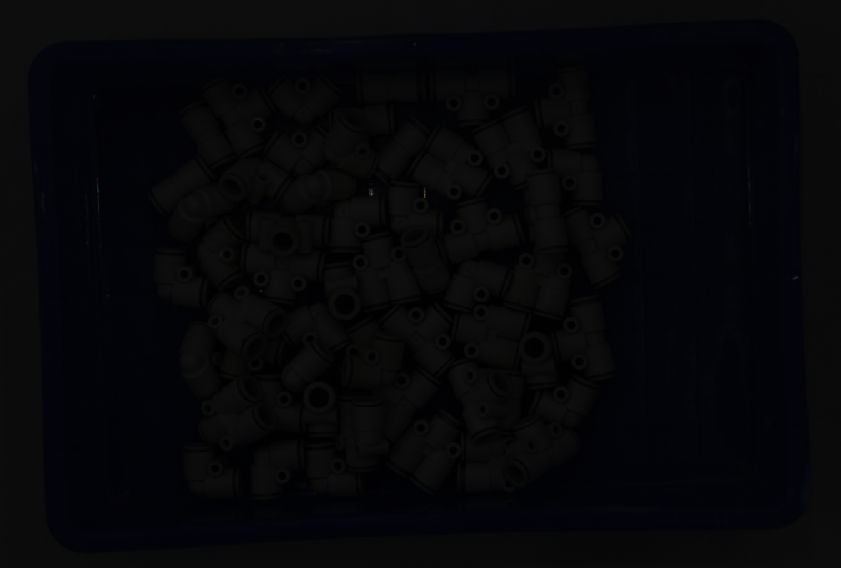
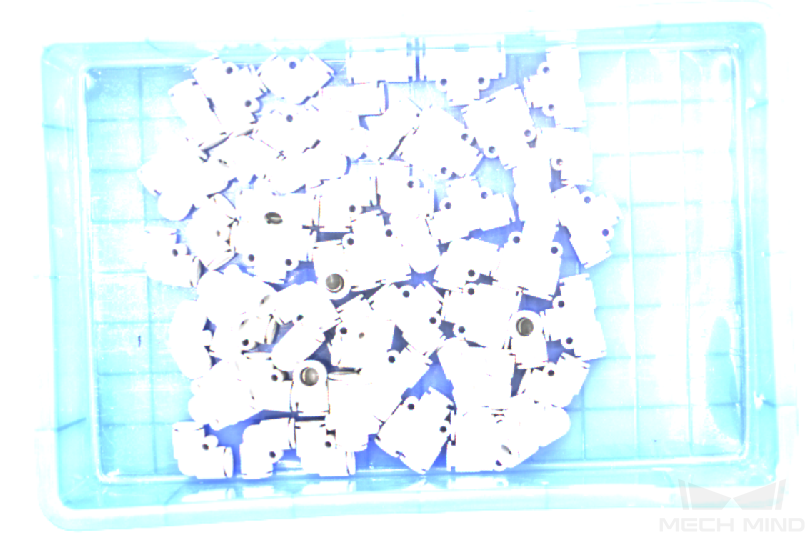
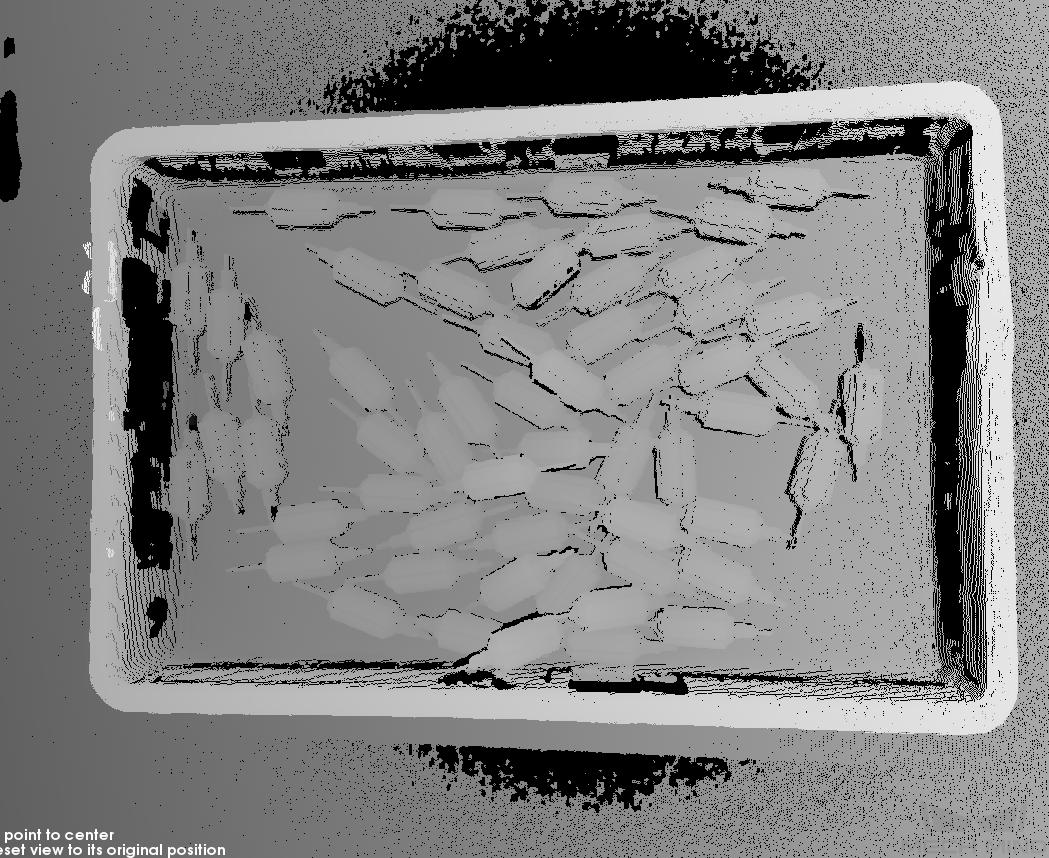
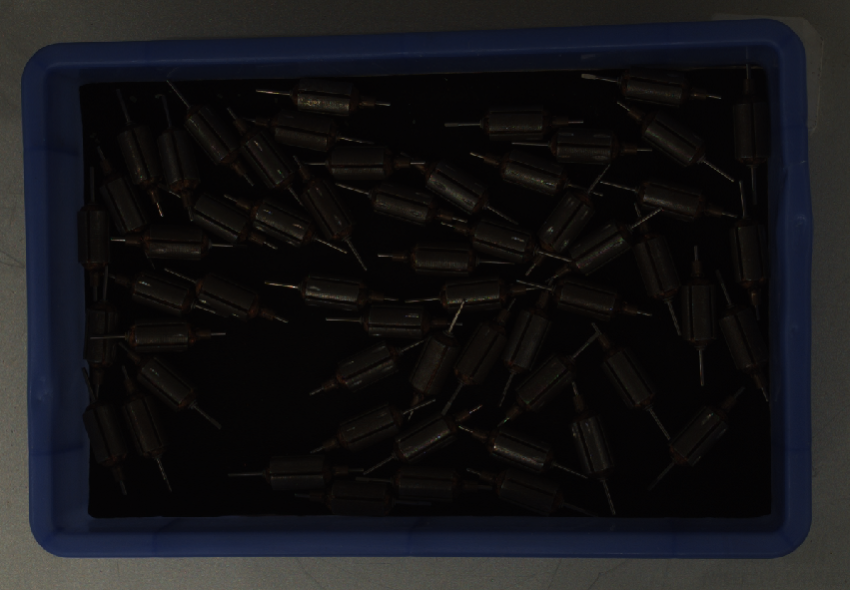
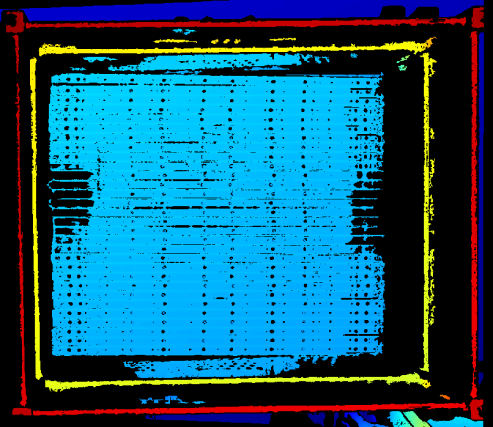
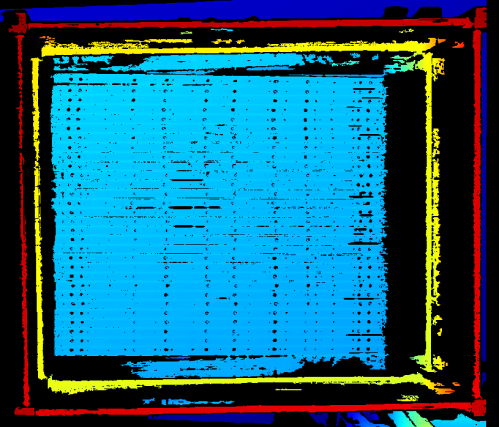
Imágenes 2D y mapas de profundidad obtenidos con diferentes valores de Ganancia (todas las otras condiciones son idénticas):
| 0 | 5 | 10 | |
|---|---|---|---|
Imagen 2D (fuente de profundidad) |
|
|
|
Mapa de profundidad |
|
|
|


2.4. Proyector
2.4.1. Brillo de Luz
Descripción de parámetro |
Afecta el brillo de la luz estructurada proyectada. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
|
Instrucciones |
Nada |
2.4.2. Modo de Codificación de Franja
Descripción de parámetro |
Selecciona el patrón de la luz estructurada por proyectar. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
|
Instrucciones |
Ajuste este parámetro según el tipo de objeto de destino, sus demandas reales de calidad de datos y velocidad de adquisición de datos. |
|
Nubes de puntos obtenidas con diferentes valores de Modo de Codificación de Franja (todas las otras condiciones son idénticas):
-
Cuando el objeto de destino es opaco o no reflectante, las nubes de puntos obtenidas al ajustar el Modo de Codificación de Franja a Accurate y Fast (todas las otras condiciones son idénticas):
Accurate Fast 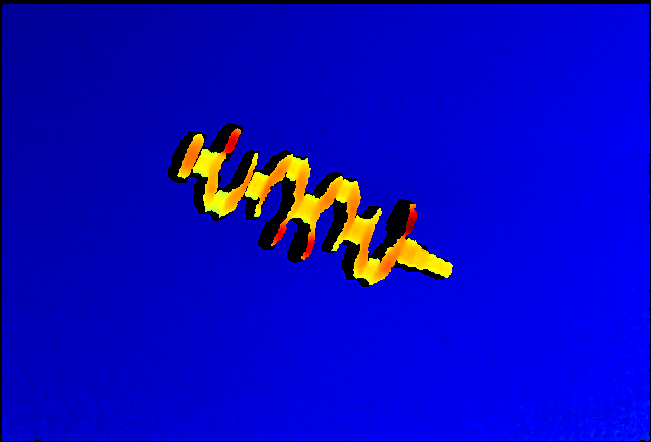

-
Cuando el objeto de destino es reflectante, las nubes de puntos obtenidas al ajustar el Modo de Codificación de Franja a Accurate y Reflective (todas las otras condiciones son idénticas):
Accurate Reflective 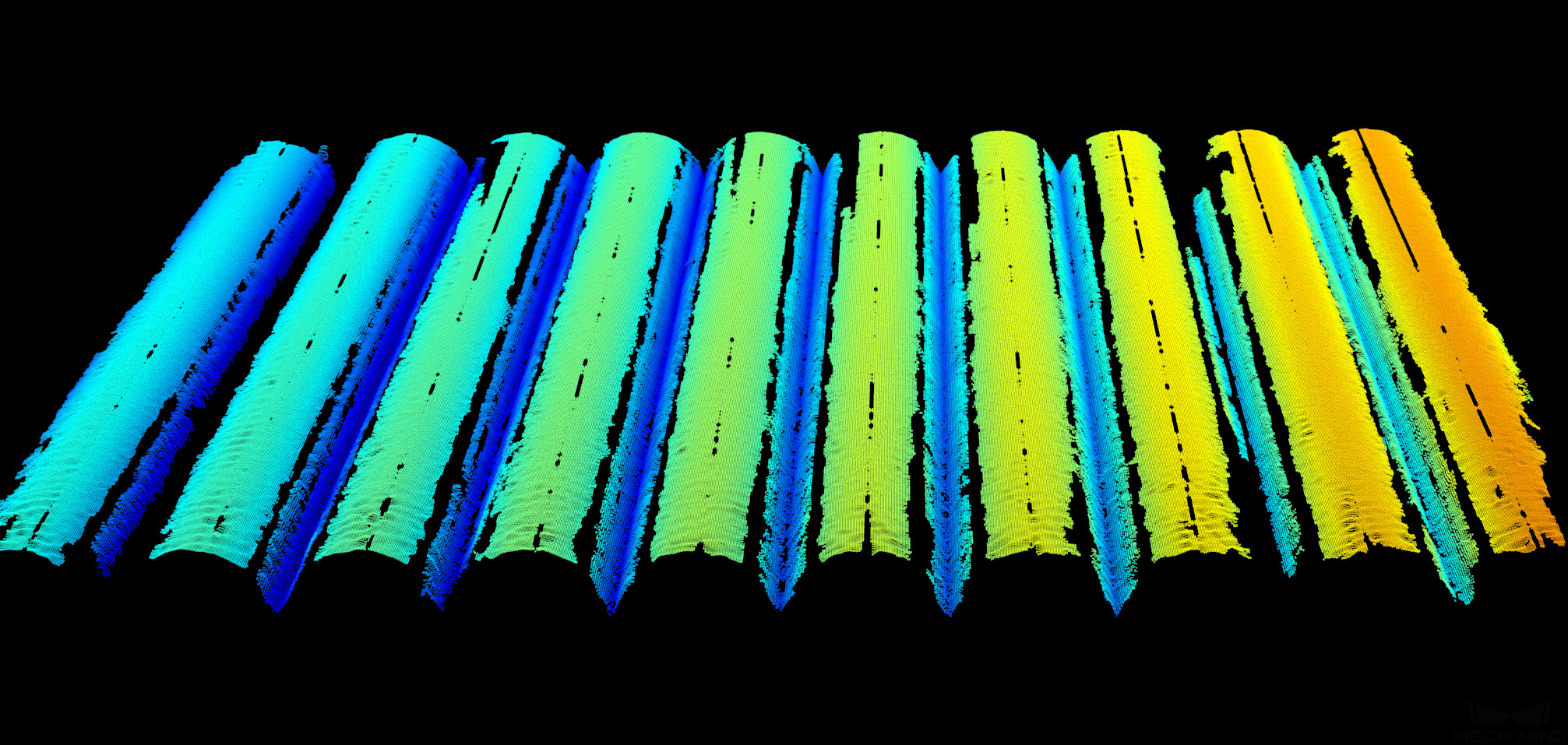
2.4.3. Reflective: Modo de Procesamiento
Descripción de parámetro |
Selecciona el modo de procesamiento de datos para el modo de codificación de franja en la opción de Reflective. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
|
Instrucciones |
Ajuste este parámetro según sus demandas reales de calidad de datos y velocidad de adquisición de datos. |
Nubes de puntos obtenidas con diferentes valores de Modo de Procesamiento (todas las otras condiciones son idénticas):
| Faster | More complete |
|---|---|
|
|
|
|
2.4.4. Modo Anti-Parpadeo
Descripción de parámetro |
El parpadeo se refiere al cambio rápido y periódico de la intensidad de luz artificial. Este fenómeno puede causar fluctuaciones en los datos de profundidad. Esta fluctuación puede reducirse ajustando la frecuencia de proyección de la luz estructurada. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
|
Instrucciones |
Seleccione la opción que corresponda a la frecuencia de la fuente de alimentación usada en su ubicación. La frecuencia de CA en la mayoría de los países y regiones es de 50Hz. La frecuencia de CA en los EE.UU. y algunos países asiáticos es de 60Hz. |
|
Al ajustar el Modo de Codificación de Franja en la categoría de Parámetros 3D a Reflective, no se puede usar el Modo de Anti-Parpadeo. |
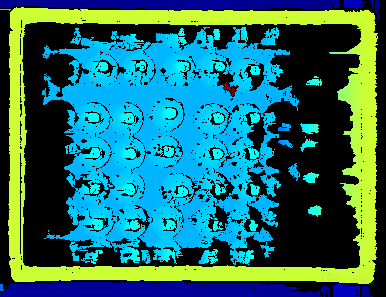
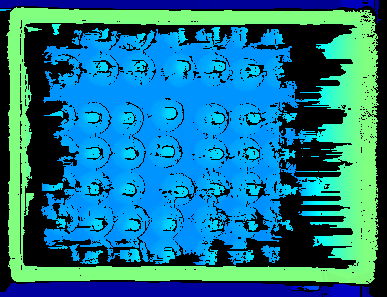
Mapas de profundidad obtenidos con Modo de Anti-Parpadeo off u on (todas las otras condiciones son idénticas):
| Off | Activo |
|---|---|
|
|

3. Procesamiento de Nube de Puntos
Ajustar los parámetros en la categoría de Procesamiento de Nube de Puntos puede mejorar la calidad de la nube de puntos.
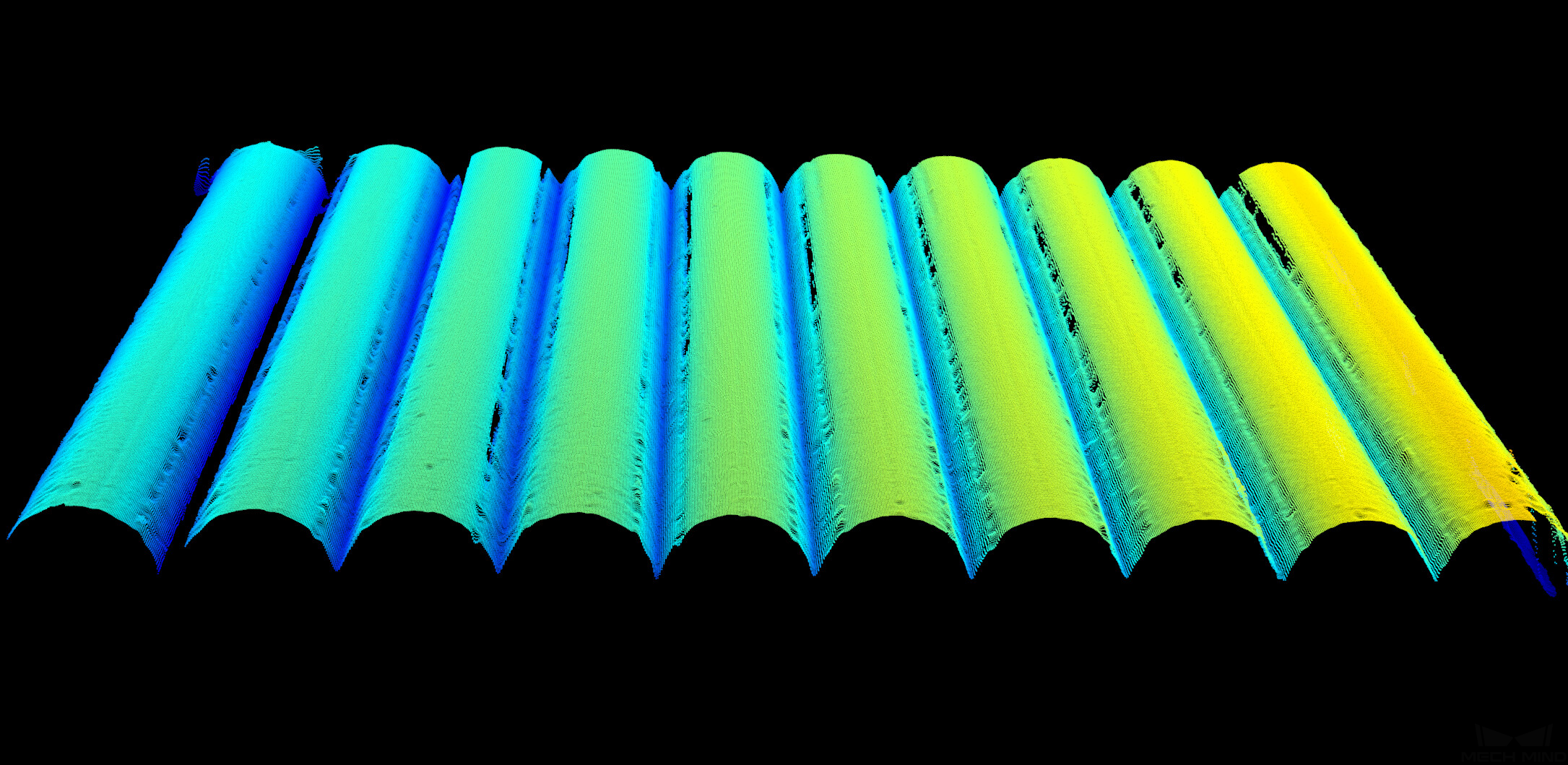
3.1. Suavizando Superficie
Descripción de parámetro |
Reduce la fluctuación de profundidad en la nube de puntos y mejora su semejanza con la superficie del objeto actual, pero puede provocar la pérdida de detalles de superficie del objeto. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
|
Instrucciones |
|
Nubes de puntos obtenidas con diferentes valores de Suavizando Superficie (todas las otras condiciones son idénticas):
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
3.2. Retirada de Valores Atípicos
Descripción de parámetro |
Retira los valores atípicos en la nube de puntos. Los valores atípicos son puntos agrupados alejados de la nube de puntos del objeto. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
|
Instrucciones |
|
Nubes de puntos obtenidas con diferentes valores de Retiración de Valores Atípicos (todas las otras condiciones son idénticas):
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
3.3. Relleno de Hueco
Descripción de parámetro |
Rellena los huecos en la nube de puntos para que las características de superficie del objeto estén completas. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
Botón de Activar Relleno de Hueco:
Tamaño de Hueco: Establece el tamaño de huecos por rellenar. Se rellenarán los huecos cuyos píxeles faltante sean menores que el valor establecido. |
Instrucciones |
Ajusta según el número de huecos en la nube de puntos. |
|
Este parámetro solo está disponible en la siguiente condición: Cuando ajusta el parámetro Modo de Codificación de Franja en la categoría de Parámetros 3D a Reflective. |
3.4. Retirada de Ruidos
Descripción de parámetro |
Retira los ruidos en la nube de puntos, reduciendo el impacto en la precisión del cálculo posterior. Los ruidos son los puntos dispersos cercanos a la superficie del objeto. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
|
Instrucciones |
|
Nubes de puntos obtenidas con diferentes valores de Retirada de Ruidos (todas las otras condiciones son idénticas):
| Off | Weak |
|---|---|
|
|
Normal |
Strong |
|
|
| Si esta función retira las características requeridas del objeto, reduce la intensidad de Retirada de Ruidos. Sin embargo, se conservará más ruidos. |
3.5. Preservación de Bordes
Descripción de parámetro |
Preserva la nitidez de los bordes del objeto durante la suavización de superficie. |
|---|---|
Visibilidad |
Maestro |
Valores |
|
Instrucciones |
Ajuste este parámetro según sus demandas para preservar los bordes de objetos de trabajo. |
3.6. Umbral de Contraste de Rayas
Descripción de parámetro |
Retira los ruidos en la nube de puntos. Ajuste este parámetro si el nivel de ruido sigue siendo alto después de ajustar Retirada de Valores Atípicos y Retirada de Ruidos. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
1 a 100 |
Instrucciones |
|
Nubes de puntos obtenidas con diferentes valores de Umbral de Contraste de Rayas (todas las otras condiciones son idénticas):
| 3 | 15 | 30 |
|---|---|---|
|
|
|
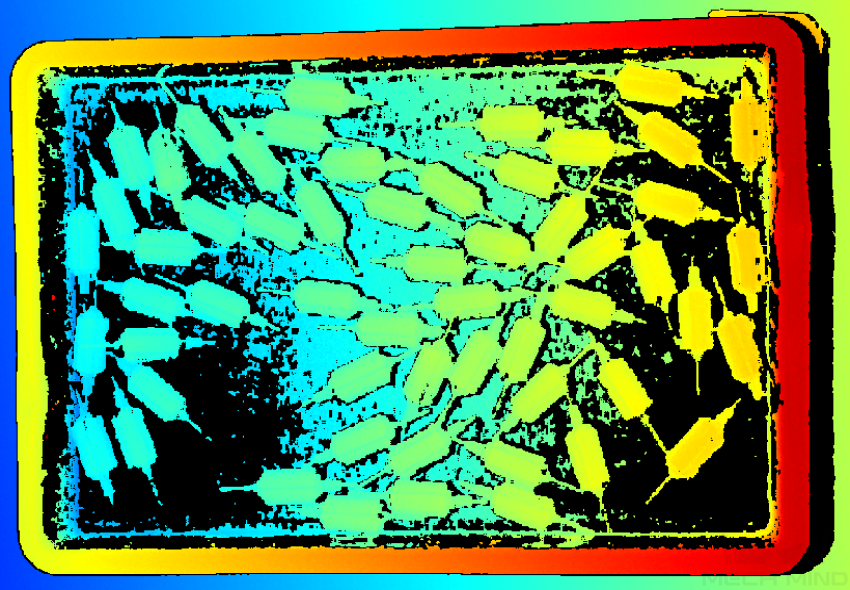
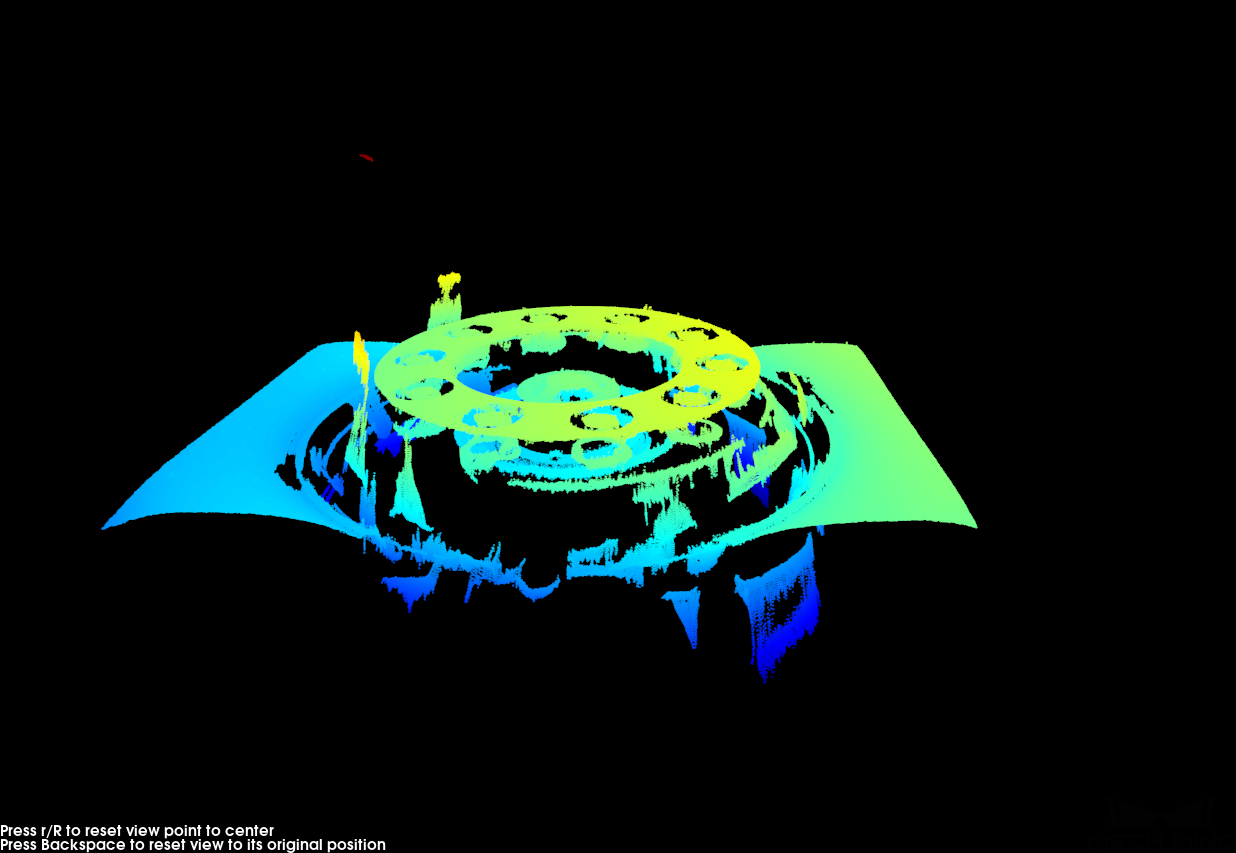
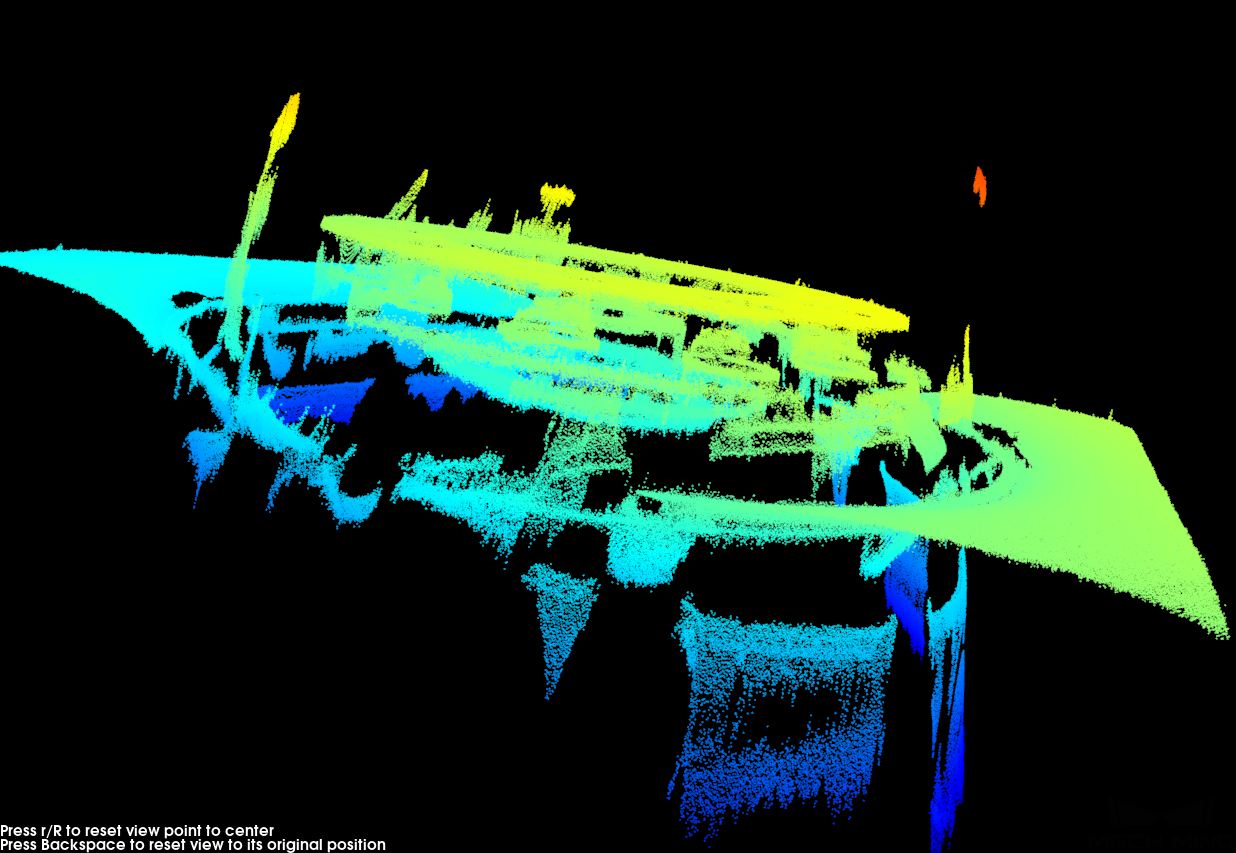
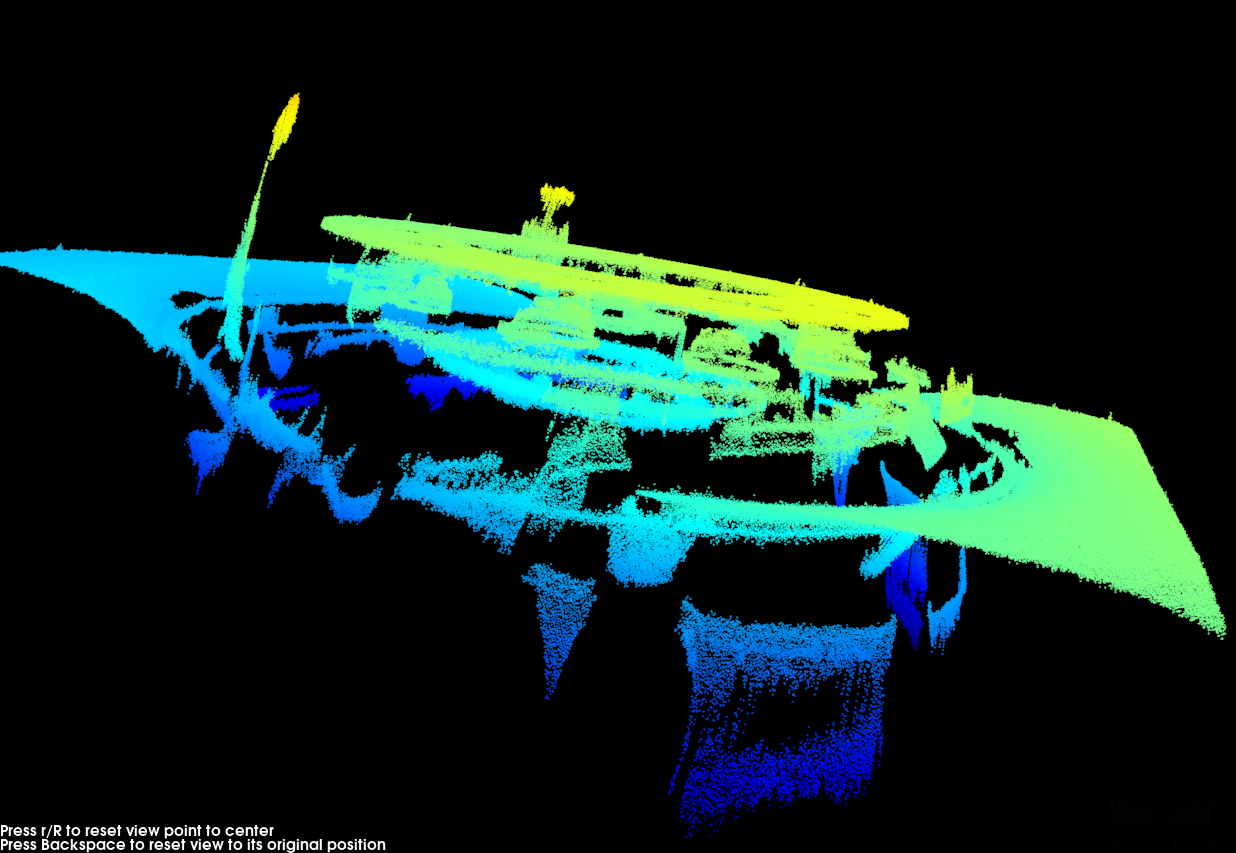
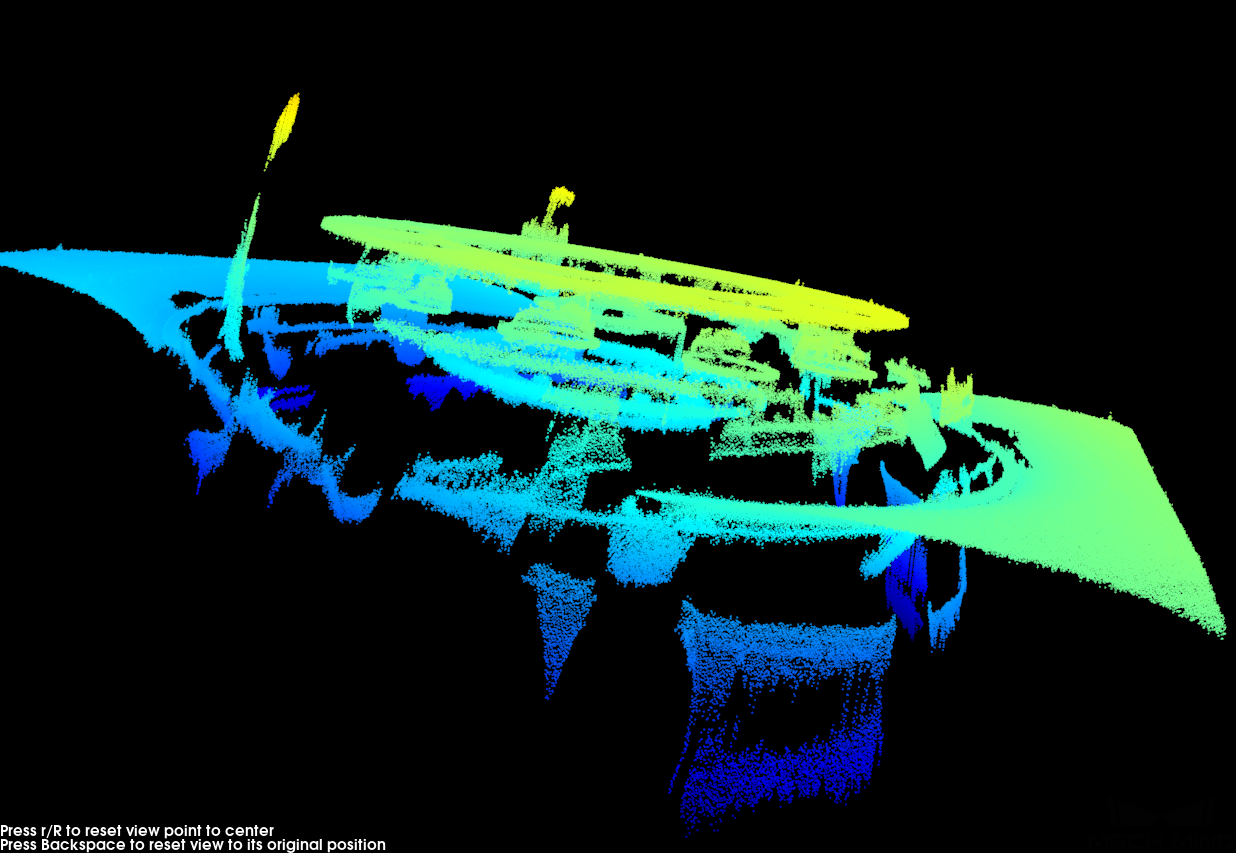
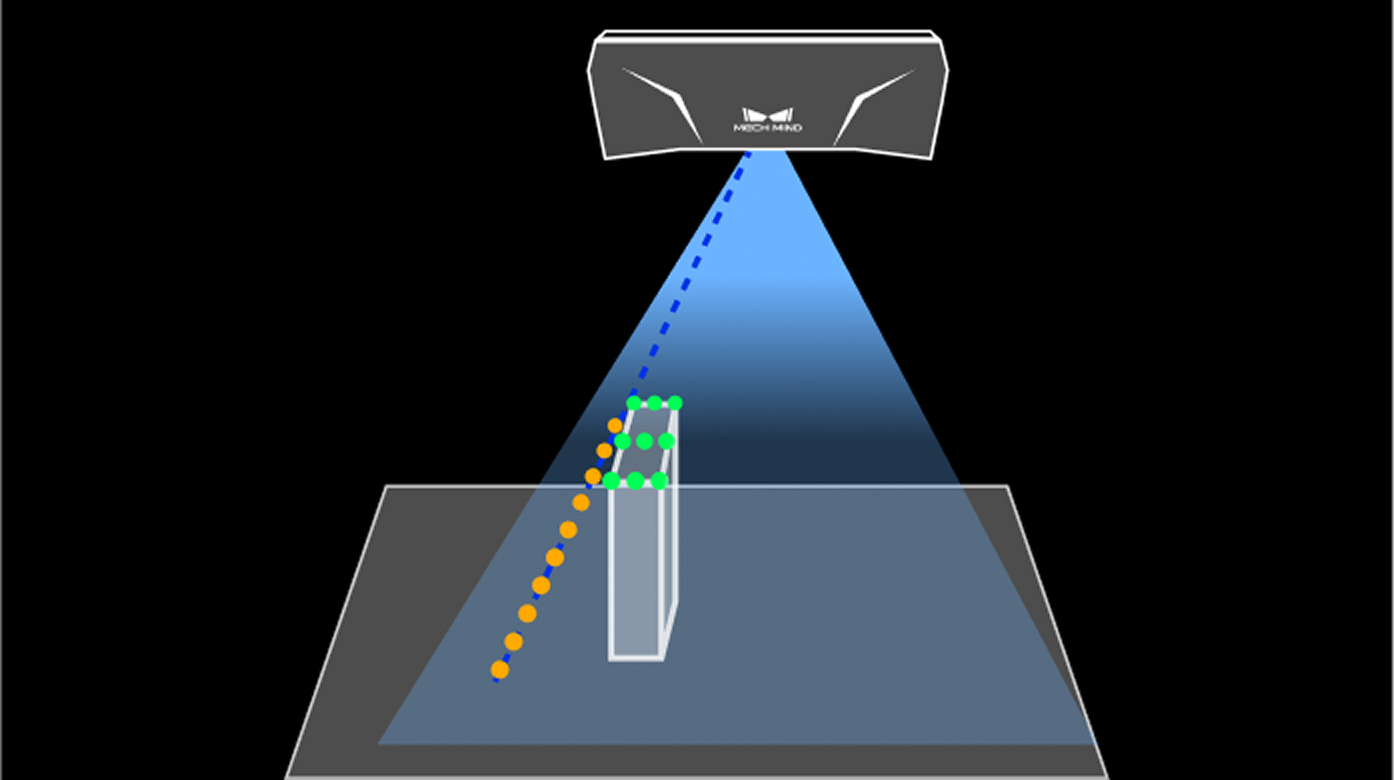
3.7. Retirada de Artefactos en Bordes
Descripción de parámetro |
Retira los artefactos en la nube de puntos que se encuentran en las regiones del contorno exterior o en los pliegues geométricos de un objeto. Los artefactos son datos erróneos que no existen realmente en los bordes del objeto, pero que se generan en la nube de puntos debido a la oclusión del campo de visión u otros factores. |
|---|---|
Visibilidad |
Experto, Maestro |
Valores |
Desactivado |
Instrucciones |
|
|
En la ilustración de abajo , los artefactos son los puntos amarillos.
|
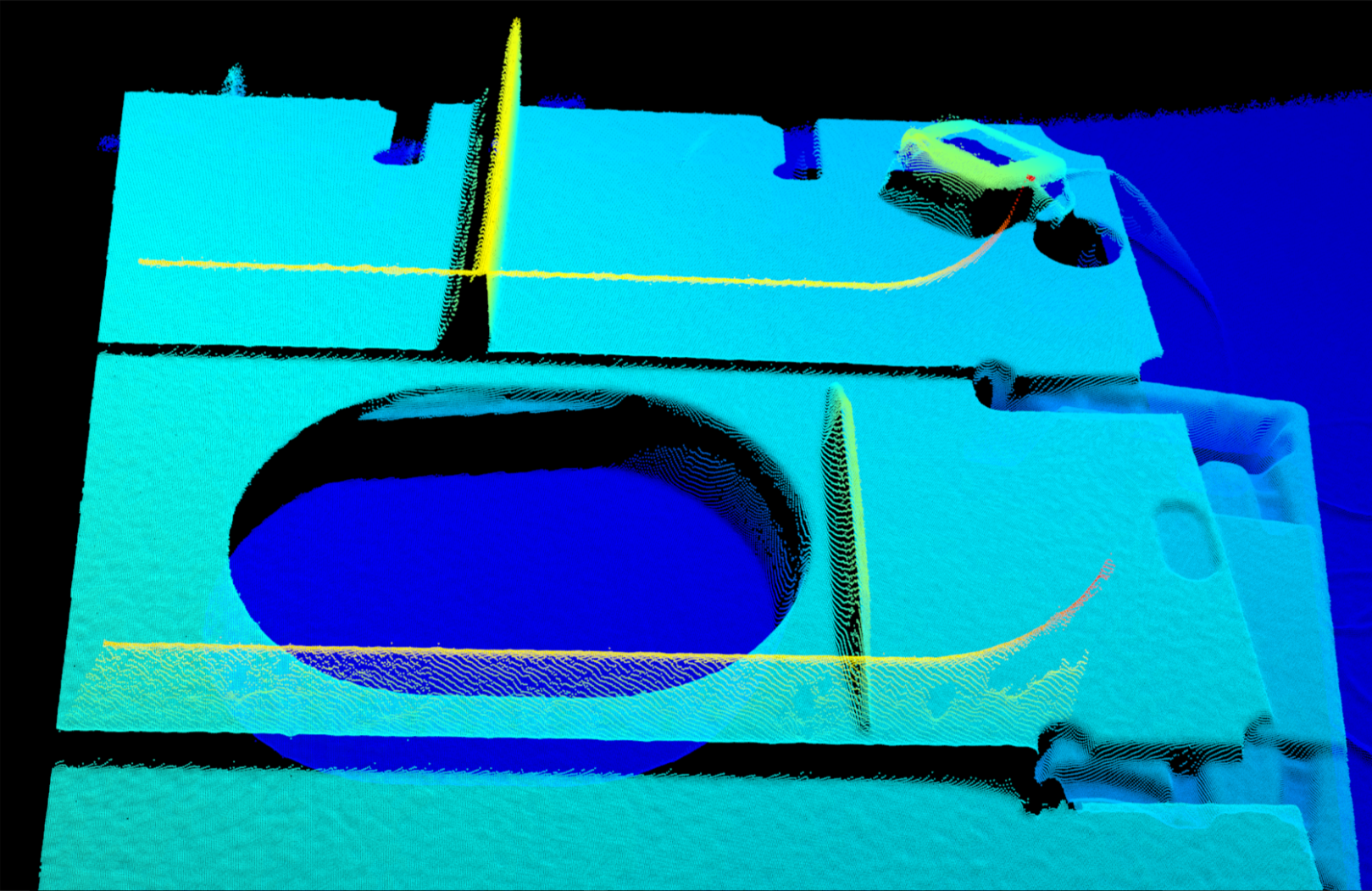
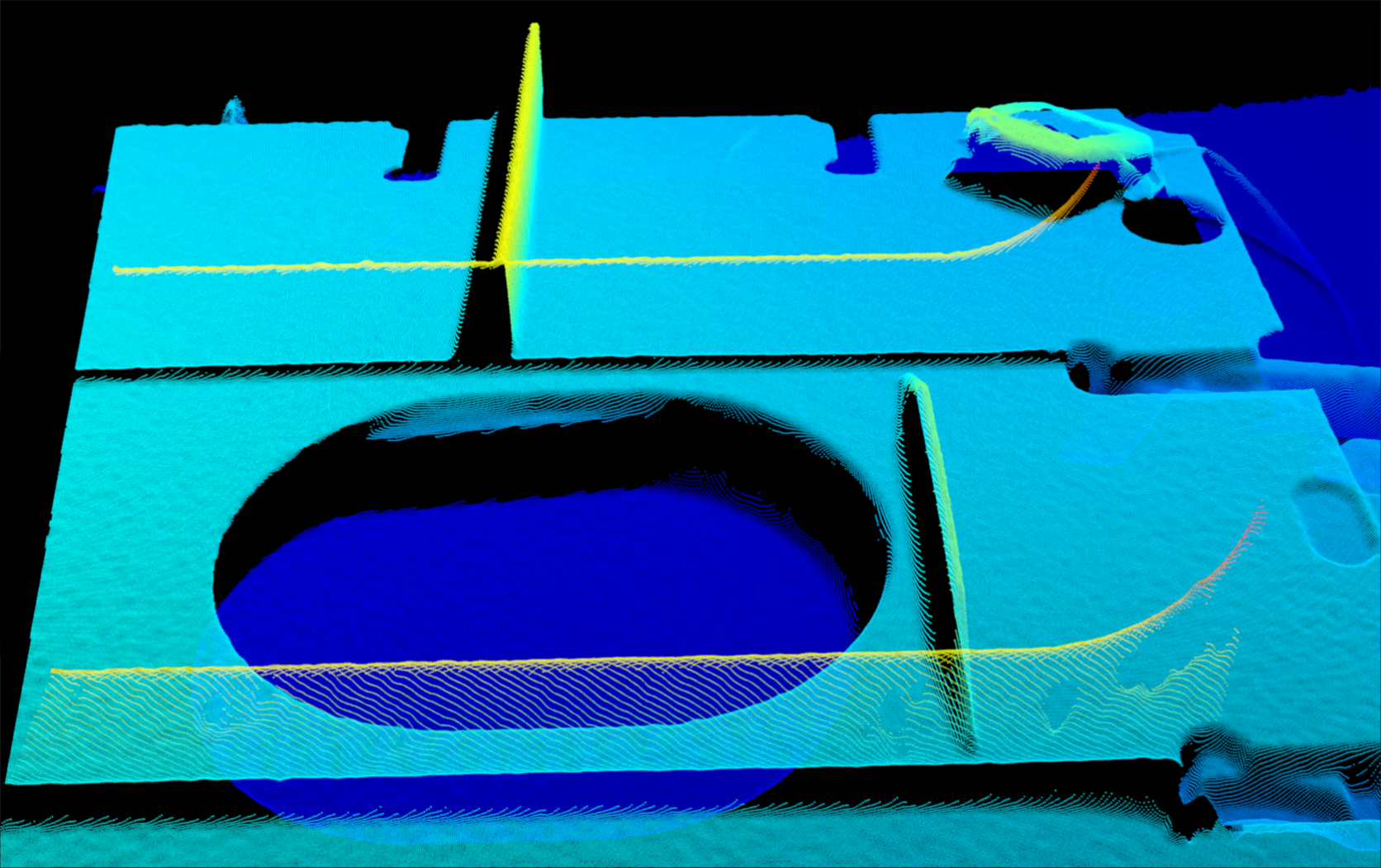
Nube de puntos obtenidas con el botón Retirada de Artefactos en Bordes activado o desactivado (todas las otras condiciones son idénticas):
| Desactivado | Activado |
|---|---|
|
|
4. Rango de Profundidad
Descripción de parámetro |
Ajusta una ROI de dirección Z para el mapa de profundidad y la nube de puntos. Ajusta el valor de Rango de Profundidad dentro del rango de distancia de trabajo de la cámara para retirar los datos fuera del rango de profundidad. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
|
Instrucciones |
|
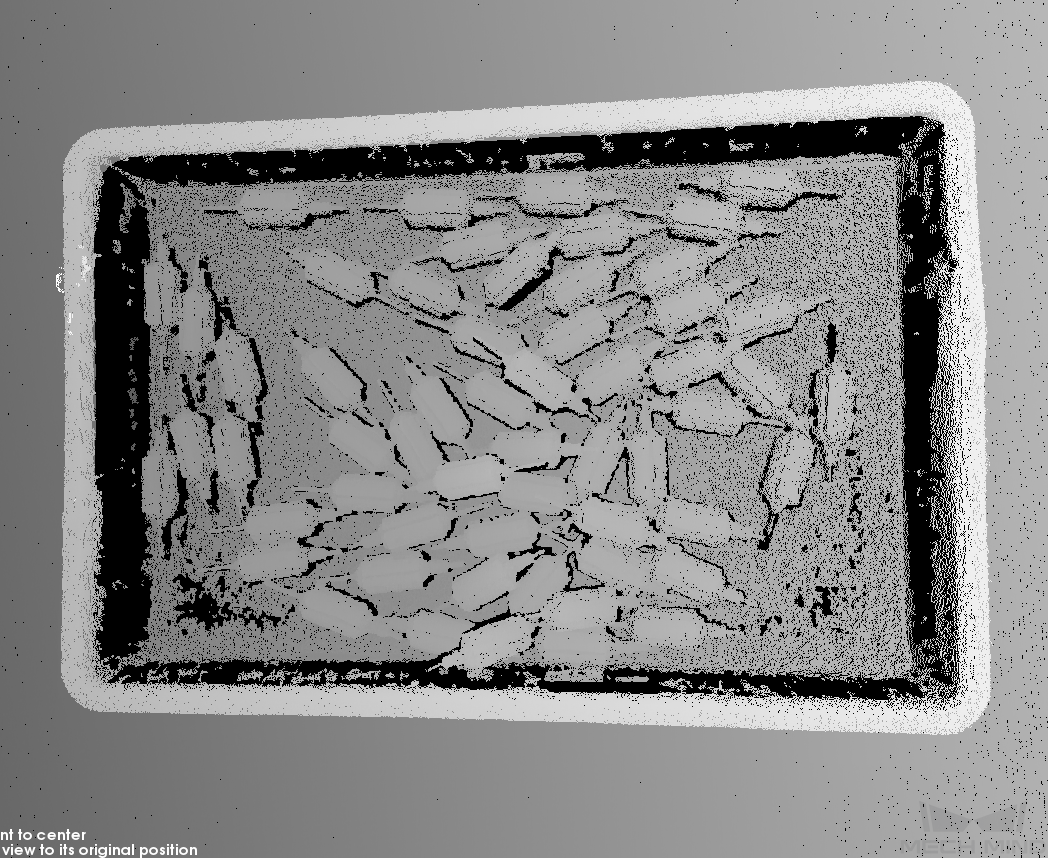
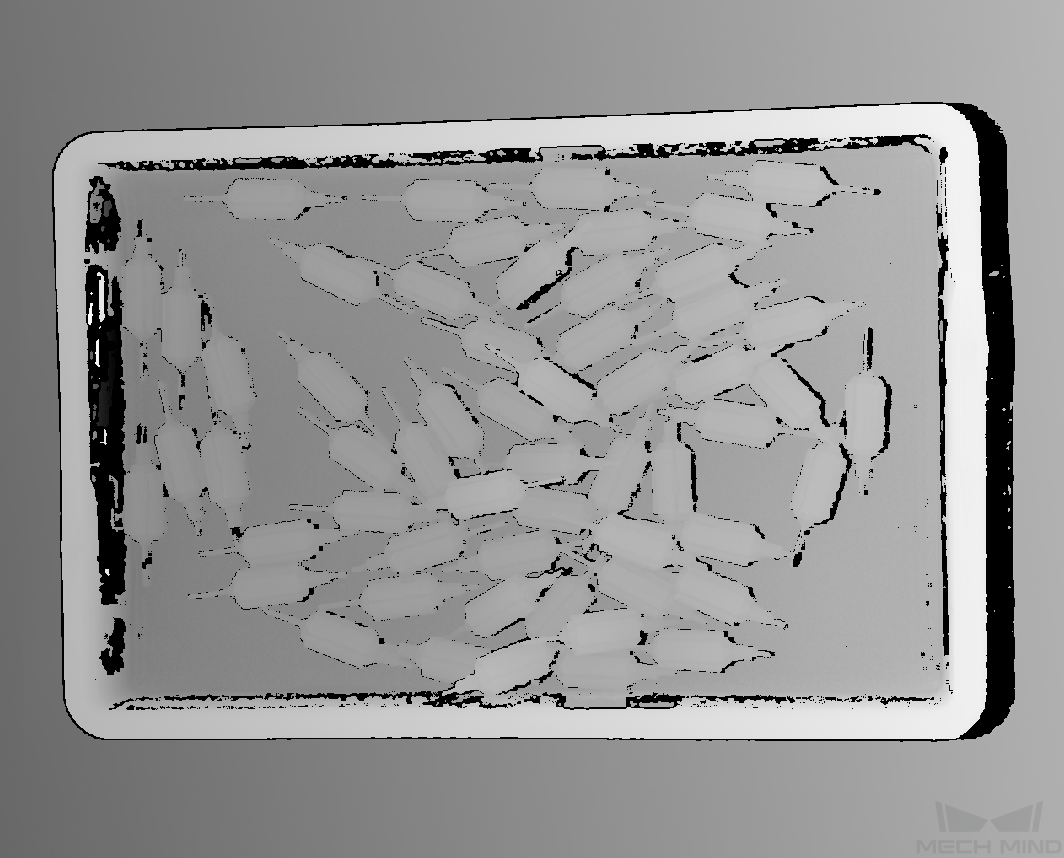
La misma nube de puntos con diferentes valores de Rango de profundidad (todas las otras condiciones son idénticas):
| Demasiado grande | Adecuado | Demasiado pequeño |
|---|---|---|
|
|
|
|
|
|


Ajustar el Rango de Profundidad
Siga los siguientes pasos para ajustar el valor de Rango de Profundidad:
-
Haga clic en el botón Editar ubicado a la derecha de Rango de Profundidad para abrir la ventana de Ajustar Rango de Profundidad.
-
Haga clic en el botón Actualizar nube de puntos ubicado en la parte superior derecha para adquirir la última nube de puntos.
-
Ajuste la posición de la nube de puntos: Ajuste la posición hasta que pueda ver los dos rectángulos grises que representan los límites superior e inferior de Rango de Profundidad.
-
Ajuste el rango de profundidad: Arrastre los controles deslizantes para ajustar el valor de Rango de Profundidad gruesamente. Inserte valores específicos para ajustar el valor de Rango de Profundidad finamente.
Norma para ajustar un rango de profundidad adecuado: Todas las características requeridas del objeto están entre los dos rectángulos grises, y la mayoría de los ruidos y valores atípicos están afuera. -
Una vez completado el ajuste, haga clic en el botón Guardar ubicado en la parte inferior derecha.
|
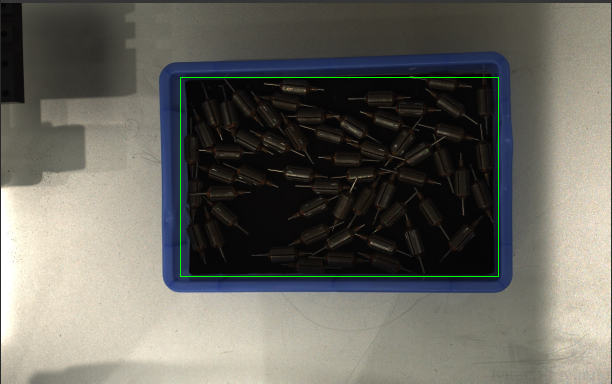
5. ROI
Descripción de parámetro |
Establece la ROI en el plano XY para el mapa de profundidad y la nube de puntos. Se retiran los puntos fuera de la región seleccionada. |
|---|---|
Visibilidad |
Principiante, Experto, Maestro |
Valores |
Nada |
Instrucciones |
Para obtener instrucciones más detalladas, consulte la sección Ajustar ROI abajo. |
Ajustar ROI
-
Haga clic en el botón Editar ubicado a la derecha de ROI para abrir la ventana de Ajustar ROI.
-
Seleccione y ajuste la ROI en la izquierda. Arrastre el cuadro de selección para moverlo y los indicadores blancos en el cuadro para ajustar dimensión del cuadro.
-
Haga clic en el botón Aplicar para aplicar la ROI ajustada.
-
Haga clic en el botón Vaciar para eliminar la ROI actual.
-
-
Adquiera de nuevo los datos y vea el mapa de profundidad o la nube de puntos para revisar el resultado de ajuste de ROI.