Herramienta de Parámetro Intrínseco
Esta herramienta sirve para revisar si los parámetros intrínsecos de la cámara están precisos y corregirlos. Las coordenadas serán precisas solo cuando los parámetros intrínsecos sean precisos.
Haga clic en el menú Herramientas, y seleccione Herramienta de Parámetro Intrínseco para abrir la ventana de Herramienta de Parámetro Intrínseco para revisar los parámetros intrínsecos y corregirlos.
Revisar los Parámetros Intrínsecos
| Antes de revisar los parámetros intrínsecos, es necesario calentar la cámara con la Herramienta de Calentamiento. A continuación, consulte la sección Seleccionar el Modelo de Tabla de Calibración para elegir una tabla de calibración adecuada, teniendo en cuenta la cámara en uso y la distancia de trabajo real. |
Procedimiento de Revisar los Parámetros Intrínsecos
Siga los siguientes pasos para revisar los parámetros intrínsecos de la cámara con Herramienta de Parámetro Intrínseco.
-
En 1. Colocar tabla de calibración y revisar calidad de imagen, revise si la calidad de la imagen 2D y del mapa de profundidad cumple los requisitos de imagen.
-
Coloque la tabla de calibración en el FOV de la cámara, y asegúrese de que la tabla de calibración esté dentro de la distancia de trabajo recomendada, además de estar alineada verticalmente con el eje central de la cámara:

-
Haga clic en el botón Adquirir imágenes para obtener la imagen 2D y el mapa de profundidad de la tabla de calibración. Asegúrese de que la imagen 2D y el mapa de profundidad obtenidos cumplan los siguientes requisitos:
-
Los círculos en la tabla de calibración están capturados completamente.
-
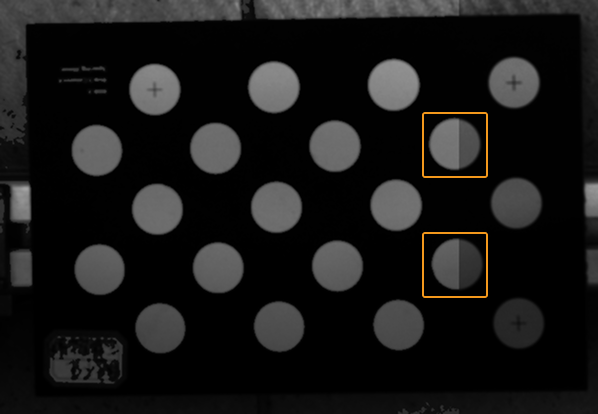
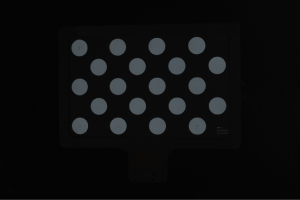
La tabla de calibración en la imagen 2D debe tener un brillo equilibrado, sin ser demasiado oscura, demasiado brillante o desigual. Los círculos de calibración deben estar claros.
-
Los círculos de calibración en el mapa de profundidad deben estar completos.
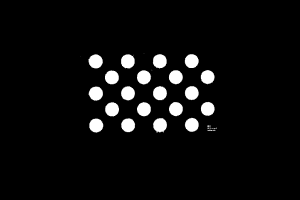
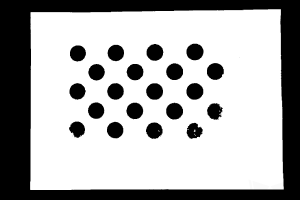
Ejemplos de la imagen 2D de la tabla de calibración:
Imagen demasiado oscura, los círculos en la tabla de calibración no pueden distinguirse fácilmente. Brillo desigual, los círculos en la tabla de calibración no pueden distinguirse fácilmente. Los círculos en la tabla de calibración están completos, sus límites están claramente visibles. Imagen demasiado brillante, los círculos en la tabla de calibración no pueden distinguirse fácilmente. 
Si la imagen 2D obtenida no cumple los requisitos de imagen, ajuste los parámetros según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración.
Ejemplos del mapa de profundidad de la tabla de calibración:
Tiempo de exposición demasiado corto, los círculos en la tabla de calibración están incompletos. Los círculos en la tabla de calibración están completos./ Toda la tabla de calibración está completa. Tiempo de exposición demasiado largo, algunos o todos los círculos en la tabla de calibración están perdidos. 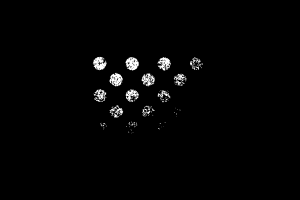
Si el mapa de profundidad obtenido no cumple los requisitos de imagen, ajuste los parámetros 3D según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración.
Para obtener una instrucción más detallada sobre cómo ajustar los parámetros, consulte el capítulo Asistente de Referencia de Parámetros.
-
-
-
En 2. Seleccionar modelo de tabla de calibración colocada, ajuste las especificaciones de esta tabla:
-
Si usa una tabla de calibración estándar, seleccione Estándar en la Categoría de tabla de calibración, y seleccione el modelo en uso en el menú desplegable según la etiqueta en la tabla de calibración.
-
Si usa una tabla de calibración personalizada, seleccione Personalizada en la Categoría de tabla de calibración, seleccione el tipo de tabla de calibración según las indicaciones de imagen, y establezca los valores de Filas, Columnas y Espacio.
-
-
En 3. Revisar y procesar los parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara. Una vez finalizada la revisión, aparecerá una ventana emergente de resultados de revisión.
-
Si observa un mensaje de error, solucione el problema según la próxima sección.
Preguntas Frecuentes en la Revisión de Parámetros Intrínsecos
Los siguientes problemas pueden presentarse al revisar los parámetros intrínsecos.
Resultado Grande en la Revisión de Parámetros Intrínsecos
Síntoma:
Los datos de resultados de revisión de parámetros intrínsecos son rojos, lo cual indica que el resultado en los parámetros intrínsecos de la cámara es grande.
Solución:
Intente las siguientes soluciones:
-
Revise si el tipo o la categoría de la tabla de calibración es correcto.
-
Si no es correcto, seleccione la opción correcta. Luego, haga clic de nuevo en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara.
-
Si es correcto, proceda con el siguiente paso.
-
-
Revise si la imagen 2D y el mapa de profundidad cumplen los requisitos de imagen. Consulte los requisitos de la imagen2D y del mapa de profundidad.
-
Si la imagen 2D no cumple los requisitos de imagen, ajuste los parámetros según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración. Si el mapa de profundidad no cumple los requisitos de imagen, ajuste los parámetros 3D según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración. Luego, haga clic de nuevo en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara.
-
Si ellos cumplen los requisitos de imagen, proceda con el próximo paso.
-
-
Revise si la cámara ha funcionado mal o presenta daños debido a colisiones con otros dispositivos, y contacte con el Soporte Técnico.
No se han Detectado los Círculos en la Tabla de Calibración
Síntoma:
La ventana de resultados de revisión de los parámetros intrínsecos indica que no se han detectado los círculos en la tabla de calibración.
Solución:
Intente las siguientes soluciones:
-
Revise si el tipo o la categoría de la tabla de calibración es correcto.
-
Si no es correcto, seleccione la opción correcta. Luego, haga clic de nuevo en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara.
-
Si es correcto, proceda con el siguiente paso.
-
-
Revise si la imagen 2D y el mapa de profundidad cumplen los requisitos de imagen. Consulte los requisitos de la imagen2D y del mapa de profundidad.
-
Si la imagen 2D no cumple los requisitos de imagen, ajuste los parámetros según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración. Luego, haga clic de nuevo en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara.
-
Si ellos cumplen los requisitos de imagen, proceda con el próximo paso.
-
-
Ajuste los parámetros de detección, como dibuje un círculo de ayuda, o ajuste los parámetros de detección (avanzado). Luego, haga clic de nuevo en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara.
-
Si la revisión se realiza con éxito, el problema se ha resuelto.
-
Si la ventana emergente de resultados de revisión de los parámetros intrínsecos sigue indicando que no se han detectado los círculos en la tabla de calibración, contacte con el Soporte Técnico.
-
Dibujar un Círculo de Ayuda
Esta función ayuda a solucionar el problema de no se detectan los círculos en la tabla de calibración.
Siga los siguientes pasos para usar la función de Dibujar Círculo de Ayuda:
-
En 3. Revisar y procesar los parámetros intrínsecos, haga clic en el botón Dibujar círculo de ayuda.
-
Localice un círculo completo en la tabla de calibración en la imagen 2D.
-
Presione el teclado Ctrl y haga clic izquierdo para seleccionar el centro del círculo.
-
Mueva el cursor a cualquier punto del círculo, presione el teclado Ctrl y haga clic izquierdo para confirmar el radio del círculo y finalizar el dibujo.
-
-
En 3. Revisar y procesar los parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar de nuevo los parámetros intrínsecos de la cámara.
|
Ajustar los Parámetros de Detección de Características (Avanzado)
Esta función ayuda a solucionar el problema de no se detectan los círculos en la tabla de calibración.
Siga los siguientes pasos para usar la función de Ajustar Parámetros de Detección de Características (Avanzado):
-
En 3. Revisar y procesar los parámetros intrínsecos, haga clic en el ítem de Ajustar Parámetros de Detección de Características (Avanzado).
-
Ajuste los parámetros de detección de características según la situación real.
-
Si no se pueden capturar todos los círculos en la tabla de calibración, marque la opción de Permitir ausencia de algunos círculos y ajuste los parámetros recién visualizados de detección de características.
-
En 3. Revisar y procesar los parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar de nuevo los parámetros intrínsecos de la cámara.
No se han Encontrado Puntos de Característica Válidos en el Mapa de Profundidad
Síntoma:
La ventana de resultados de revisión de los parámetros intrínsecos indica que no se han encontrado puntos de característica válidos en el mapa de profundidad.
Solución:
Revise si el mapa de profundidad cumple los requisitos de imagen. Consulte los requisitos de la imagen2D y del mapa de profundidad.
-
Si el mapa de profundidad no cumple los requisitos de imagen, ajuste los parámetros 3D según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración. Luego, haga clic de nuevo en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara.
-
Si el mapa de profundidad cumple los requisitos de imagen, contacte con el Soporte Técnico.
Exposición Inadecuada para la Imagen 2D
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que la imagen 2D está demasiado brillante, oscura o el brillo de la imagen 2D está desigual, no cumple los requisitos de imagen.
| Si es necesario un resultado de revisión más preciso, se recomienda ajustar los parámetros según la siguiente solución. |
Solución:
Intente las siguientes soluciones:
-
Si la imagen 2D está demasiado brillante u oscura, ajuste los parámetros según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración para asegurarse de que la imagen 2D cumpla los requisitos.
-
Si el brillo de la imagen 2D está desigual, revise y ajuste las configuraciones relativas según el capítulo Brillo Desigual de la Imagen 2D, con el fin de garantizar que el brillo de un solo círculo en la tabla de calibración sea uniforme.
Área del Círculo en la Tabla de Calibración Demasiado Pequeña
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que los círculos en la tabla de calibración ocupan muy poco el campo de visión de la cámara.
| Si es necesario un resultado de revisión más preciso, se recomienda ajustar los parámetros según la siguiente solución. |
Solución:
-
Si la resolución actual es demasiado baja, se recomienda aumentar la resolución de imagen según la sección Cambiar la Resolución de la Imagen.
-
Si la tabla de calibración actual es demasiado pequeña, se recomienda usar una tabla de calibración más grande.
Corregir los Parámetros Intrínsecos
Esta función ayuda a solucionar el problema de que los errores en los parámetros intrínsecos son grandes. Se recomienda usar la función de Corregir los parámetros intrínsecos en los siguientes escenarios:
-
El valor de diferencia escalar en el resultado de revisión de parámetros intrínsecos es mayor que el valor en la siguiente tabla.
-
El proyecto requiere una alta precisión de cámara, sin embargo, la precisión actual no cumple los requisitos establecidos.
| Modelo | Valor de diferencia escalar |
|---|---|
DEEP-GL |
0,6% |
LSR L-GL, LSR S-GL, Laser L Enhanced |
0,5% |
LSR XL-GL |
0,4% |
PRO M-GL, PRO S-GL, NANO-GL, NANO ULTRA-GL |
0,3% |
|
Si no se han encontrado anormalidades en la revisión de los parámetros intrínsecos, puede hacer clic en el botón Iniciar corrigiendo parámetros intrínsecos para abrir la página de Revisar parámetros intrínsecos para realizar la corrección.
Colocar la Tabla de Calibración
Al usar la función de Corregir Parámetros Intrínsecos, coloque la tabla de calibración según los siguientes requisitos:
-
Asegúrese de que el plano de la tabla de calibración sea lo más perpendicular posible al eje de la cámara:
-
Coloque la tabla de calibración en los siguientes dos planos: la superficie superior (plano 1) y la superficie inferior (plano 2) del objeto de destino. La diferencia de altura entre los dos planos no es menor que 100 mm.
Por ejemplo, para aplicaciones como la recogida de contenedor o despaletización/paletización, es necesario colocar la tabla de calibración en las superficies superior e inferior del contenedor o del palé respectivamente.
-
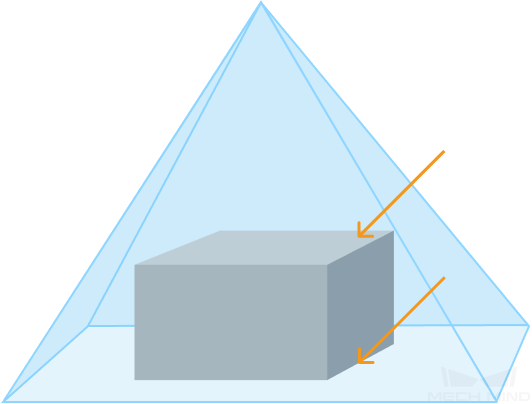
Asegúrese de que la tabla de calibración esté siempre dentro del FOV de la cámara.
Esta herramienta proporciona una ayuda para garantizar que la tabla de calibración esté siempre dentro del FOV de la cámara. Si desea usarla, siga los siguientes pasos:
-
Haga clic en el botón Iniciar la adquisición de imágenes, y coloque la tabla de calibración en diferentes posiciones del plano actual, la imagen 2D y el mapa de profundidad se actualizarán a una tasa fija (aproximadamente una vez cada cinco segundos).
-
Si la imagen 2D y el mapa de profundidad están completos, se indica que esta posición está dentro del FOV de la cámara. De lo contrario, puede que quede fuera.
-
Al confirmar el FOV de la cámara en el plano actual, es necesario hacer clic en el botón Parar la adquisición de imágenes. A continuación, puede añadir datos en el plano actual según la próxima sección.
-
Después de añadir datos en el plano actual, puede repetir dicho proceso para añadir datos en el otro plano.
-
El botón de activar/desactivar la adquisición de imágenes y los otros botones de esta página no se pueden usar al mismo tiempo.
-
Adquirir y Validar los Datos
Es necesario mover la tabla de calibración en ambos planos mencionados (plano 1 y plano 2), y hacer clic en el botón Adquirir datos para obtener datos de diferentes ubicaciones de la tabla de calibración. Los datos que superen la validación se consideran válidos. Los criterios de validación son los siguientes:
| Elemento | Valor |
|---|---|
Cobertura de área mínima |
25% |
Cobertura mínima de longitud |
50% |
Cobertura mínima de anchura |
50% |
Conjuntos de datos mínimos |
3 |
Para adquirir datos en los dos planos, es necesario cumplir los siguientes requisitos:
-
Primero adquiera los datos en el Plano 1 y luego adquiera los datos en el Plano 2.
-
Cuando existan datos en el Plano 2, no se podrán modificar los datos del Plano 1.
-
Después de completar la adquisición y validación de datos en ambos planos, haga clic en el botón Corregir parámetros intrínsecos para iniciar el proceso de corrección.
| El panel Áreas cubiertas por datos adquiridos, ubicado en la parte inferior, puede ayudar a ajustar la posición de la tabla de calibración, con el fin de garantizar que los datos adquirido superen la validación. |
Una vez validados los datos adquiridos en ambos planos, puede hacer clic en el botón Corregir los Parámetros Intrínsecos para iniciar la corrección de los parámetros intrínsecos. Si observa un mensaje de error durante el proceso de adquisición y adición de datos, solucione el problema según la próxima sección.
Si se ha corregido los parámetros intrínsecos con éxito, haga clic en el botón Actualizar parámetros intrínsecos en la ventana emergente de Resultado de corregir parámetros intrínsecos, con el fin de usar los parámetros intrínsecos corregidos para aumentar la precisión de la cámara.
Si no se puede corregir los parámetros intrínsecos, siga las instrucciones en la ventana emergente.
Preguntas Frecuentes en la Corrección de Parámetros Intrínsecos
Los siguientes problemas pueden presentarse al corregir los parámetros intrínsecos.
No se Puede Reconocer los Círculos en la Tabla de Calibración
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que en la imagen 2D no se puede reconocer los círculos en la tabla de calibración.
Solución:
Intente las siguientes soluciones:
-
Revise si la tabla de calibración está dentro del FOV de la cámara.
-
Si la tabla de calibración ha excedido el FOV de la cámara, ajuste su posición. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si la tabla de calibración está dentro de los FOVs de todas las cámaras, proceda con el próximo paso.
-
-
Revise si la imagen 2D cumple los requisitos de imagen. Consulte los requisitos de la imagen2D y del mapa de profundidad.
-
Si la imagen 2D está demasiado brillante u oscura, ajuste los parámetros según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración para asegurarse de que la imagen 2D cumpla los requisitos. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si el brillo de la imagen 2D está desigual, revise y ajuste las configuraciones relativas según el capítulo Brillo Desigual de la Imagen 2D, con el fin de garantizar que el brillo de un solo círculo en la tabla de calibración sea uniforme. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si la imagen 2D cumple los requisitos de imagen, proceda con el próximo paso.
-
-
Si el problema aún persiste, guarde el archivo técnico y contacte con el Soporte Técnico.
No se Puede Reconocer Todos los Círculos en la Tabla de Calibración
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que es necesario reconocer n círculos en la tabla de calibración, pero solo se reconocen m círculos.
Solución:
-
Revise si la tabla de calibración está dentro del FOV de la cámara y del rango de proyección del proyector.
-
Si la tabla de calibración no está dentro de los dos campos mencionados, ajuste su posición para asegurarse de que esté dentro del FOV de la cámara y del rango de proyección del proyector. Además, revise los parámetros 3D para garantizar una exposición adecuada. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si la tabla de calibración está dentro de los dos campos mencionados, proceda con el próximo paso.
-
-
Si el problema aún persiste, guarde el archivo técnico y contacte con el Soporte Técnico.
Los Datos Adquiridos no Está en el Plano Actual
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que los datos adquiridos no están en el plano actual. Es decir, la distancia entre el plano donde están los datos actuales y la cámara no está dentro del rango aceptable.
Solución:
-
Ajuste la posición de la tabla de calibración para que la distancia entre ella y la cámara esté dentro del rango aceptable. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si el problema aún persiste, guarde el archivo técnico y contacte con el Soporte Técnico.
El Error en los Datos Actuales es Demasiado Grande
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que el error en los datos actuales es demasiado grande.
Solución:
Intente las siguientes soluciones:
-
Revise si hay varias tablas de calibración dentro del FOV de la cámara.
-
Si hay varias, retire las otras. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si solo hay una tabla de calibración, proceda con el próximo paso.
-
-
Revise si la imagen 2D cumple los requisitos de imagen. Consulte los requisitos de la imagen2D y del mapa de profundidad.
-
Si la imagen 2D está demasiado brillante u oscura, ajuste los parámetros según el capítulo Ajustar los Parámetros de Exposición 2D y 3D para la Calibración para asegurarse de que la imagen 2D cumpla los requisitos. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si el brillo de la imagen 2D está desigual, revise y ajuste las configuraciones relativas según el capítulo Brillo Desigual de la Imagen 2D, con el fin de garantizar que el brillo de un solo círculo en la tabla de calibración sea uniforme. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si la imagen 2D cumple los requisitos de imagen, proceda con el próximo paso.
-
-
Revise si la tabla de calibración está dentro del FOV de la cámara y del rango de proyección del proyector.
-
Si la tabla de calibración no está dentro de los dos campos mencionados, ajuste su posición para asegurarse de que esté dentro del FOV de la cámara y del rango de proyección del proyector. Además, revise los parámetros 3D para garantizar una exposición adecuada. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si la tabla de calibración está dentro de los dos campos mencionados, proceda con el próximo paso.
-
-
Si el problema aún persiste, guarde el archivo técnico y contacte con el Soporte Técnico.
No se Puede Adquirir Datos
Síntoma:
En el panel de Mensajes ubicado en la parte inferior de la interfaz del software aparece un mensaje, diciendo que no se puede adquirir datos.
Solución:
-
Guarde el archivo técnico.
-
Revise la conexión de la cámara.
-
Si se presentan anomalías de la conexión, conecte la cámara de nuevo. A continuación, haga clic de nuevo en el botón Adquirir Datos para realizar la adquisición de datos.
-
Si la cámara está conectada correctamente, contacte con el Soporte Técnico.
-