Herramienta de Parámetro Intrínseco
Esta herramienta sirve para revisar si los parámetros intrínsecos de la cámara están precisos y corregirlos, así como restablecer los parámetros intrínsecos de fábrica. Las coordenadas serán precisas solo cuando los parámetros intrínsecos sean precisos.
Condiciones Previas
Antes de revisar los parámetros intrínsecos, prepare la tabla de calibración en el paquete de accesorio de la cámara.
Coloque la tabla dentro del FOV de la cámara para obtener la imagen 2D y el mapa de profundidad de dicha tabla. Asegúrese de que la imagen 2D y el mapa de profundidad obtenidos cumplan los siguientes requisitos:
-
La región que contiene los círculos en la tabla de calibración está completamente capturada.
-
La imagen 2D no está demasiado brillante ni oscura, y los círculos en la tabla de calibración están claros y completos.
-
Los círculos en la tabla de calibración del mapa de profundidad están completos.
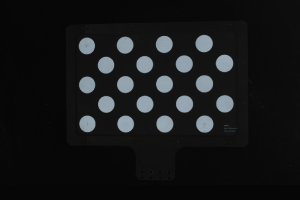
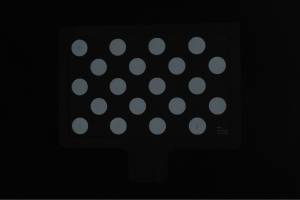
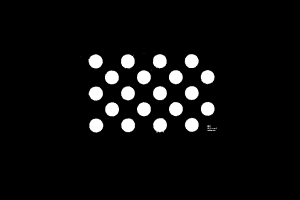
Ejemplos de la imagen 2D de la tabla de calibración:
| Imagen demasiado oscura, los círculos en la tabla de calibración no pueden distinguirse fácilmente. | Los círculos en la tabla de calibración están completos, sus límites están claramente visibles. | Imagen demasiado brillante, los círculos en la tabla de calibración no pueden distinguirse fácilmente. | |
|---|---|---|---|
|
|
|
|

Si la imagen 2D obtenida no cumple los requisitos, ajuste los parámetros que afectan la imagen 2D.
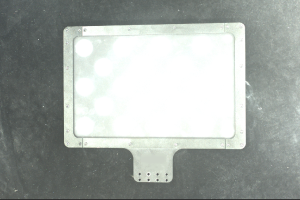
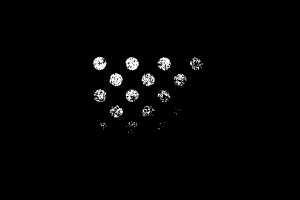
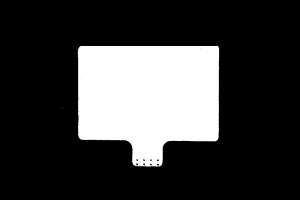
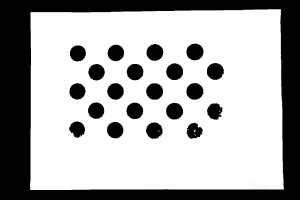
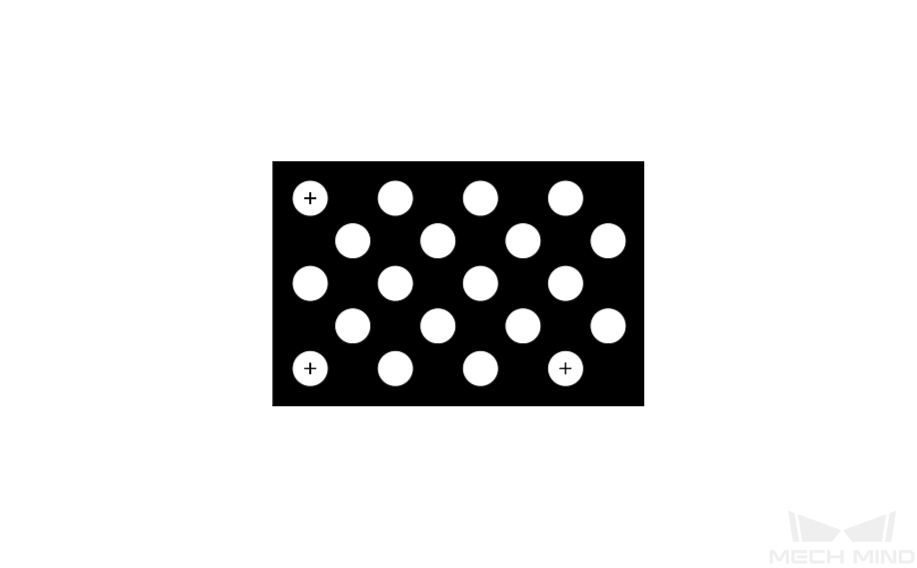
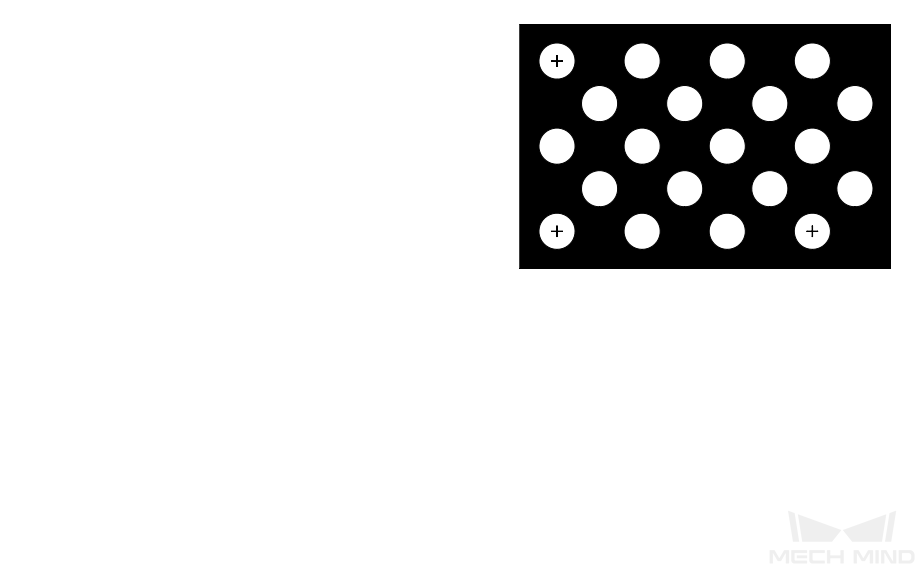
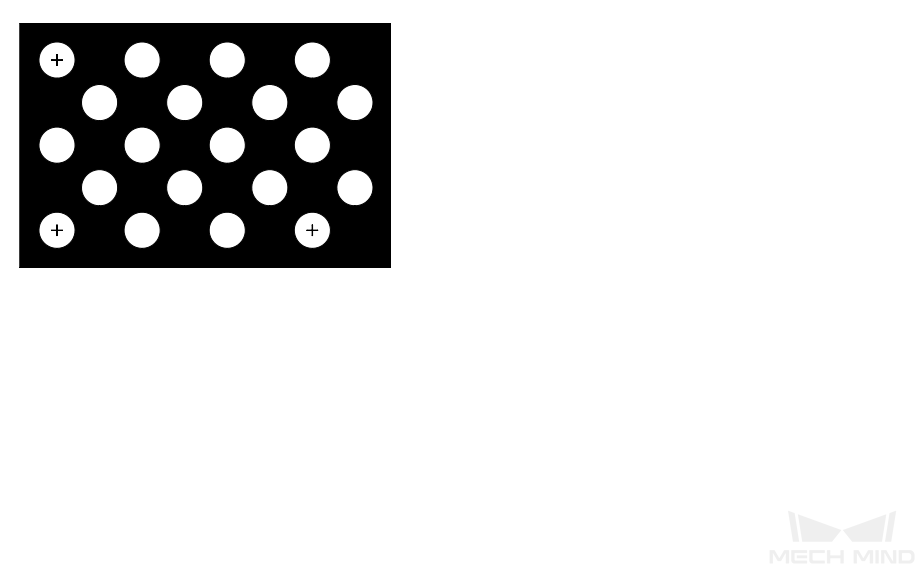
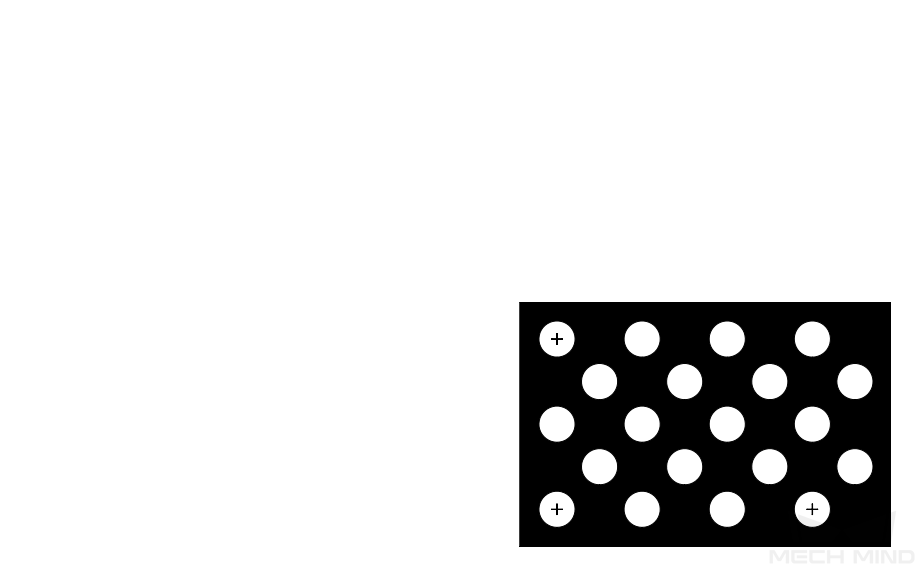
Ejemplos del mapa de profundidad de la tabla de calibración:
| Tiempo de exposición demasiado corto, los círculos en la tabla de calibración están incompletos. | Los círculos en la tabla de calibración están completos./ Toda la tabla de calibración está completa. | Tiempo de exposición demasiado largo, algunos o todos los círculos en la tabla de calibración están perdidos. | |
|---|---|---|---|
|
|
|
|
Si el mapa de profundidad obtenido no cumple los requisitos, ajuste los parámetros que afectan el mapa de profundidad.
Revisar los Parámetros Intrínsecos
Haga clic en el menú Herramientas, y seleccione Herramienta de Parámetro Intrínseco para abrir la ventana de Herramienta de Parámetro Intrínseco.
Siga los siguientes pasos para revisar los parámetros intrínsecos de la cámara con Herramienta de Parámetro Intrínseco.
-
En 1. Colocar tabla de calibración y revisar calidad de imagen, haga clic en el botón Adquirir imágenes para obtener la imagen 2D y el mapa de profundidad de la tabla de calibración. Revise si las imágenes adquiridas cumplen los requisitos.
-
En 2. Seleccionar modelo de tabla de calibración colocada, ajuste las especificaciones de esta tabla:
-
Si usa una tabla de calibración estándar, seleccione el modelo en el menú desplegable ubicado a la derecha.
-
Si usa una tabla de calibración personalizada, seleccione Personalizado y ajuste Modelo, Filas, Columnas y Espacio según la información proporcionada por el ingeniero.
-
-
En 3. Revisar parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de la cámara. Una vez finalizada la revisión, aparecerá una ventana emergente de resultados de revisión.
| Si visualiza un mensaje de error, solucione el problema según la próxima sección. |
Preguntas Frecuentes
Los siguientes problemas pueden presentarse al revisar los parámetros intrínsecos.
No se han Detectado los Círculos en la Tabla de Calibración
Síntoma:
La ventana de resultados de revisión de los parámetros intrínsecos indica que No se han detectado los círculos en la tabla de calibración.
Solución:
Intente las siguientes soluciones:
-
Revise si las especificaciones de la tabla de calibración son correctas.
-
Si no son incorrectas, inserte las especificaciones correctas. Luego, revise los parámetros intrínsecos de la cámara de nuevo.
-
Si son correctas, proceda con el siguiente paso.
-
-
Revise si la imagen 2D y el mapa de profundidad cumplen los requisitos de la imagen. Consulte los requisitos de imagen.
-
Si la imagen 2D no cumple los requisitos, ajuste los parámetros que afectan la imagen 2D. Si el mapa de profundidad no cumple los requisitos, ajuste los parámetros que afectan el mapa de profundidad. Luego, revise los parámetros intrínsecos de la cámara de nuevo.
-
Si las imágenes cumplen los requisitos, proceda con el siguiente paso.
-
-
Use la función de Dibujar círculo de ayuda para facilitar la detección. Para obtener instrucciones detalladas, consulte la sección dibujar un círculo de ayuda.
-
En 3. Revisar parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de nuevo.
-
Si la revisión se realiza con éxito, el problema se ha resuelto.
-
Si la ventana de resultados de revisión de los parámetros intrínsecos sigue indicando que No se han detectado los círculos en la tabla de calibración, proceda con el siguiente paso.
-
-
Use la función de Editar parámetros de Detección de Características (Avanzado) para facilitar la detección. Para obtener instrucciones detalladas, consulte la sección editar los parámetros de detección de características (avanzado).
-
En 3. Revisar parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de nuevo.
-
Si la revisión se realiza con éxito, el problema se ha resuelto.
-
Si la ventana emergente de resultados de revisión de los parámetros intrínsecos sigue indicando que No se han detectado los círculos en la tabla de calibración, contacte con el Soporte Técnico.
-
No se han Encontrado Puntos de Característica Válidos en el Mapa de Profundidad
Síntoma:
La ventana de resultados de revisión de los parámetros intrínsecos indica que No se han encontrado puntos de característica válidos en el mapa de profundidad.
Solución:
Revise si el mapa de profundidad cumple los requisitos. Consulte los requisitos de imagen.
-
Si el mapa de profundidad no cumple los requisitos, ajuste los parámetros que afectan el mapa de profundidad. Luego, revise los parámetros intrínsecos de la cámara de nuevo.
-
Si el mapa de profundidad cumple los requisitos, contacte con el Soporte Técnico.
Funciones Complementarias
La Herramienta de Parámetro Intrínseco proporciona las siguientes funciones para ayudar a solucionar los problemas frecuentes.
Corregir los Parámetros Intrínsecos
Esta función ayuda a solucionar el problema de que los errores en los parámetros intrínsecos son grandes.
| Las series UHP no puede usar la función de Corregir los Parámetros Intrínsecos. Si el error en los parámetros intrínsecos son grandes, contacte con el Soporte Técnico. |
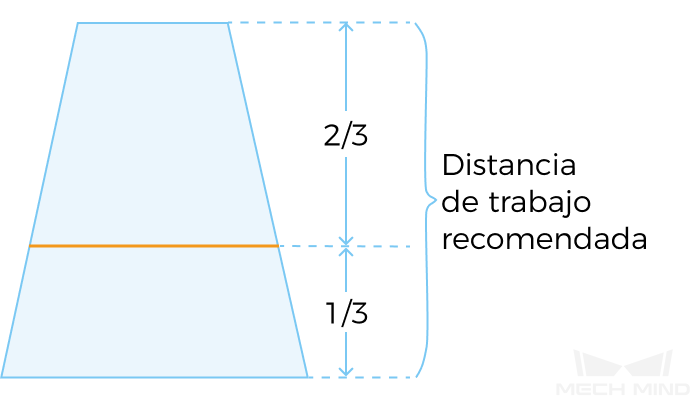
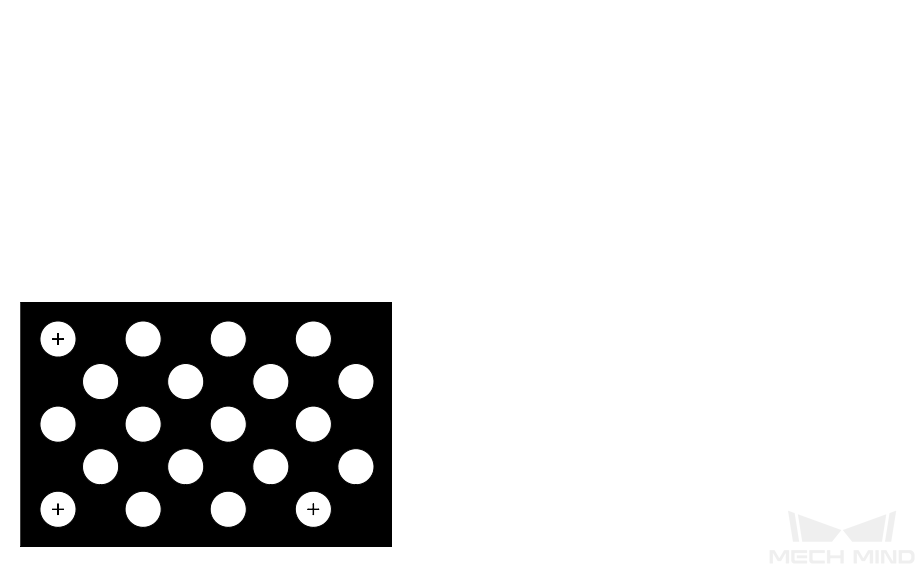
Al usar la función de Corregir Parámetros Intrínsecos, coloque la tabla de calibración según los siguientes requisitos:
-
Coloque la tabla de calibración a la altura de la línea naranja que se muestra en la ilustración de abajo:
-
Adquiera por lo menos cinco conjuntos de datos cuando la tabla de calibración está en el centro o cuatro esquinas del FOV.
|
|
|
|
|
Siga los siguientes pasos para usar la función de Corregir Parámetros Intrínsecos:
-
Coloque la tabla de calibración según los requisitos de arriba.
-
Marque la opción de Corregir Parámetros Intrínsecos, y haga clic en el botón Adquirir datos.
-
Mueva la tabla de calibración y haga clic de nuevo en el botón Adquirir datos.
-
Después de añadir los datos, haga clic en el botón Corregir parámetros intrínsecos. Una vez finalizada la corrección, aparecerá una ventana emergente de resultado de corrección.
Dibujar un Círculo de Ayuda
Esta función ayuda a solucionar el problema de no se detectan los círculos en la tabla de calibración.
Siga los siguientes pasos para usar la función de Dibujar Círculo de Ayuda:
-
Haga clic en 3. Revisar parámetros intrínsecos, haga clic en el botón Dibujar círculo de ayuda.
-
Localice un círculo completo en la tabla de calibración en la imagen 2D. Mueva el cursor al centro del círculo. Mantenga pulsado el teclado Ctrl, haga clic izquierdo y mueva el cursor en diagonal hacia arriba o hacia abajo para ajustar el tamaño del círculo de ayuda. Haga clic de nuevo para completar el dibujo del círculo.
-
Solo se necesita un círculo de ayuda, que debe estar lo más cerca posible del borde del círculo en la tabla de calibración.
-
Para dibujar el círculo de ayuda de nuevo, haga clic otra vez en el botón Dibujar círculo de ayuda.
-
Para acercar o alejar la imagen 2D, coloca el cursor en la imagen 2D y desplace la rueda del ratón.
-
Editar los Parámetros de Detección de Características (Avanzado)
Esta función ayuda a solucionar el problema de no se detectan los círculos en la tabla de calibración.
Siga los siguientes pasos para usar la función de Editar Parámetros de Detección de Características (Avanzado):
-
En 3. Revisar parámetros intrínsecos, haga clic en Editar Parámetros de Detección de Características (Avanzado).
-
Ajuste los parámetros de detección de características según la situación real.
-
Si no se pueden capturar todos los círculos en la tabla de calibración, marque la opción de Permitir ausencia de algunos círculos y edite los parámetros recién visualizados de detección de características.
-
En 3. Revisar parámetros intrínsecos, haga clic en el botón Revisar parámetros intrínsecos para revisar los parámetros intrínsecos de nuevo.