Mecanismo de Cámara 3D de Luz Estructurada
La Cámara Industrial 3D de Mech-Eye (en adelante, “cámara 3D”) es una cámara 3D de luz estructurada y, está compuesta por cámara(s) 2D y un proyector. Mediante la luz estructurada emitida por el proyector, la cámara 3D puede adquirir los datos de profundidad del objeto de destino. Al mismo tiempo, puede adquirir la imagen 2D del objeto de destino, como una cámara 2D normal.
El proceso completo del funcionamiento de la cámara 3D se divide en tres etapas: adquisición de datos, cálculo y procesamiento de datos, y salida de datos. En las siguientes secciones se presentan las tres etapas.
La Adquisición de Datos
La cámara 3D puede adquirir los datos 2D y 3D del objeto de destino al mismo tiempo.
-
Adquisición de datos 3D:
-
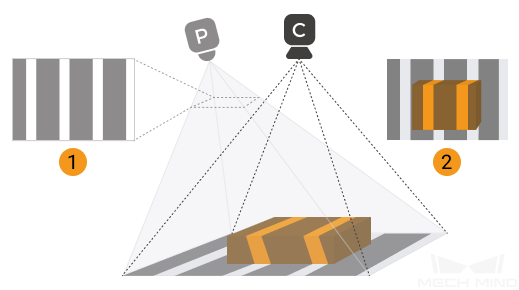
El proyector (P en la figura de abajo) emite un patrón de luz estructurada (① en la figura de abajo) sobre la superficie del objeto de destino. Debido a la forma del objeto de destino, el patrón de la luz se distorsiona.
-
La cámara 2D (C en la figura de abajo) captura imágenes (② en la figura de abajo) que incluyen el patrón distorsionado de la luz y el objeto de destino.
-
El proyector sigue emitiendo luces estructuradas con diferentes patrones, y la cámara 2D captura imágenes hasta que se proyecten todos los tipos de luz estructurada.
-
-
Adquisición de datos 2D: Cuando el proyector no emite la luz estructurada, la imagen capturada por la cámara 2D es la imagen 2D del objeto de destino.
Cálculo y Procesamiento
Basándose en la deformación del patrón de rayas, la cámara 3D calcula los datos de profundidad de la superficie del objeto. Después de procesar dichos datos, genera mapas de profundidad y nubes de puntos.
Salida
La cámara 3D transmite los datos generados a Mech-Eye SDK o el cliente de GenICam. De este modo, el usuario puede obtener la imagen 2D, el mapa de profundidad y la nube de puntos.
-
Imagen 2D: La imagen capturada por la cámara 2D cuando el proyector no emite la luz estructurada.
-
Mapa de profundidad: Una imagen con la información de profundidad.
-
Nube de puntos: Una colección de puntos de datos que contienen la información de las coordenadas tridimensionales (XYZ) de la superficie del objeto.