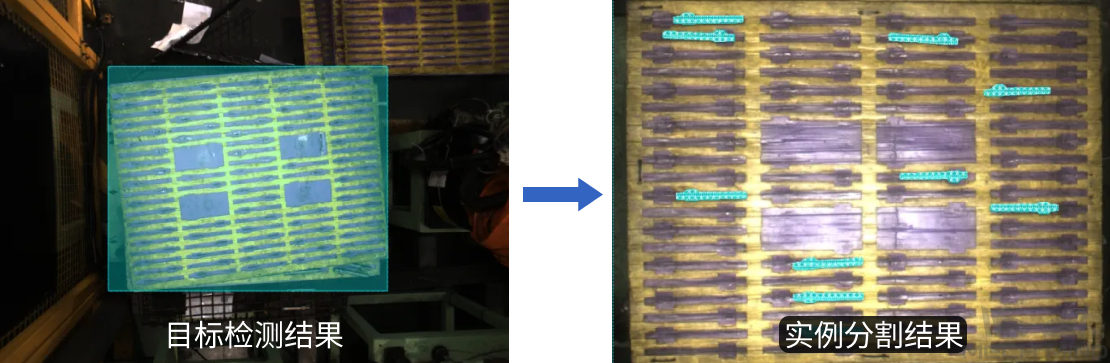
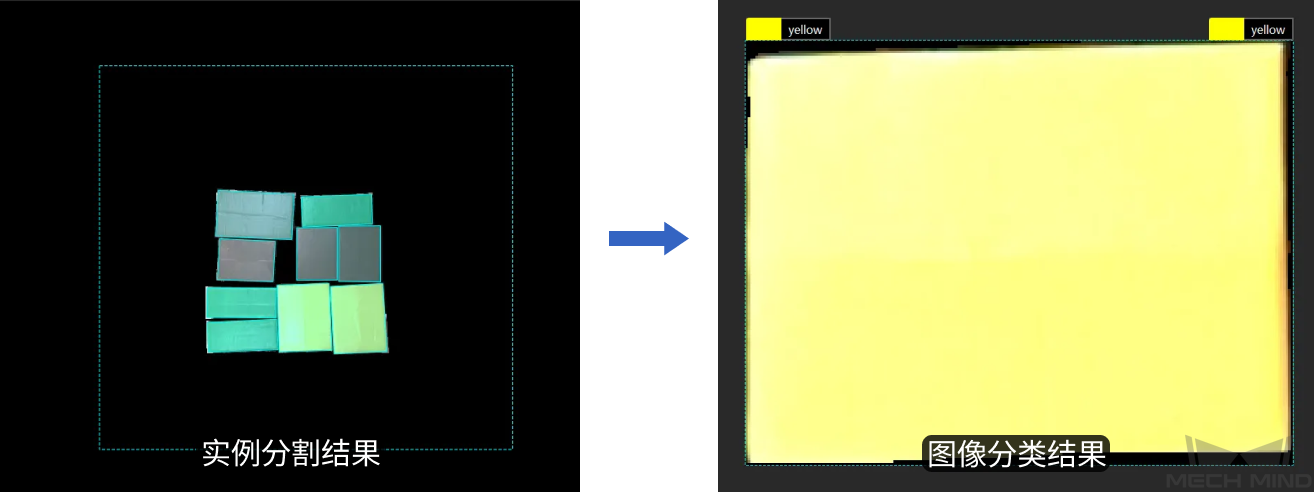
常用于3D视觉引导业务的级联组合 您正在查看V2.5.3版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 本文介绍3D视觉引导业务中常见的级联组合,并提供示例工程用于实践。 目标检测 - 实例分割(单击下载示例工程) 特点:检测到目标所在区域后,定位区域中待抓取的目标。 适用场景:适用于托盘、料筐、堆垛场景,来料高度变化较大且来料位置随机,一个固定ROI无法覆盖所有位置。 实例分割 - 图像分类(单击下载示例工程) 特点:分割出图像中的单个物品后,对物品进行分类,标注每个物品对应的类别。 适用场景:使用超级模型识别纸箱、麻袋,并且需要根据表面颜色、图案等特征区分物品类型。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 常用于AI质检业务的级联组合 深度学习算法与3D匹配算法使用场景比较