把持位置姿勢の作成戦略
把持位置姿勢は、ロボットが把持できるワーク上の位置を表します。ワークが複数の方法で把持可能な場合、特にバラ積みピッキングのシーンでは、ワークライブラリで異なる把持戦略を設定することをお勧めします。これにより、異なる配置状態のワークがロボットの到達可能な範囲内で把持できるようになり、把持成功率が向上します。
以下では、ワークライブラリでサポートされている把持戦略について説明します。
複数の把持位置姿勢を設定
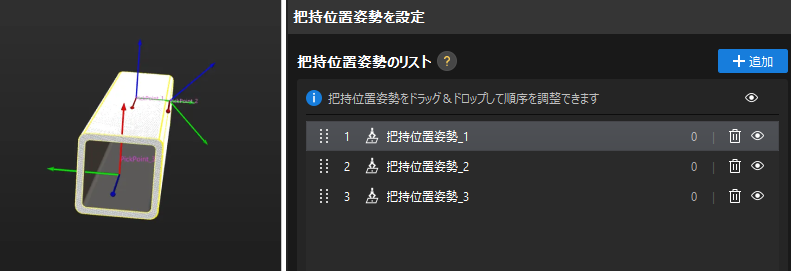
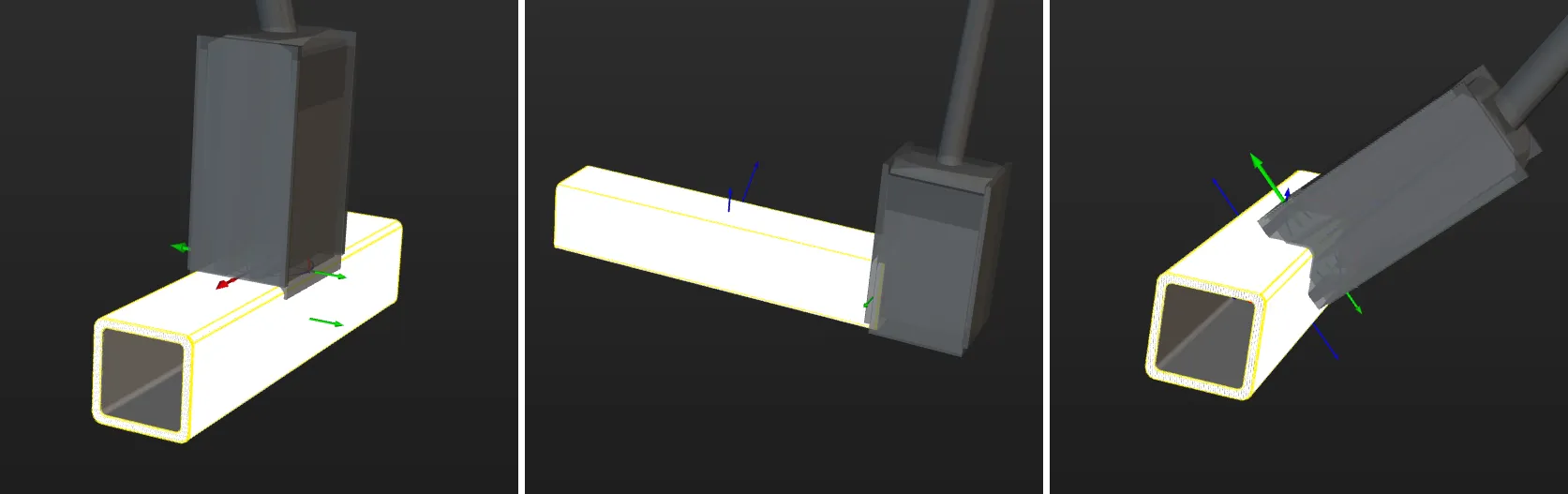
下図に示すように、角管の側面、端面、およびエッジはすべて磁気吸着式ハンドで吸着可能です。そのため、角管のこれらの3つの位置に把持位置姿勢を設定できます。
複数の把持位置姿勢を設定する場合、把持位置姿勢リスト内の把持位置姿勢の位置も変更できます。つまり、把持位置姿勢の順序を上または下に調整することで、その優先順位を設定できます。実際に把持する際には、リストの一番上にある把持位置姿勢が優先されます。