Mech-Eye SDK 2.2.1 更新説明
Mech-Eye Viewer
新機能
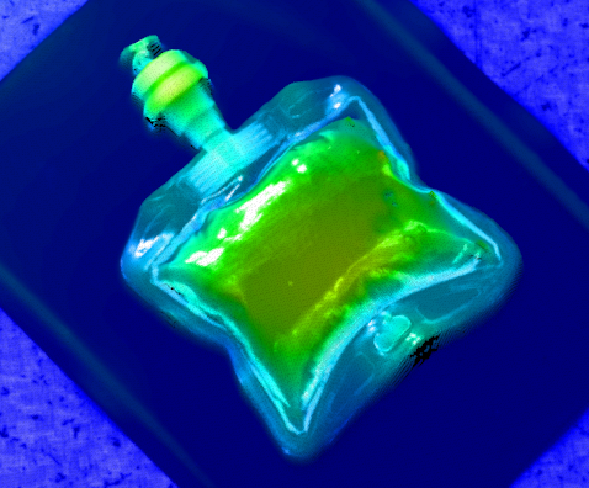
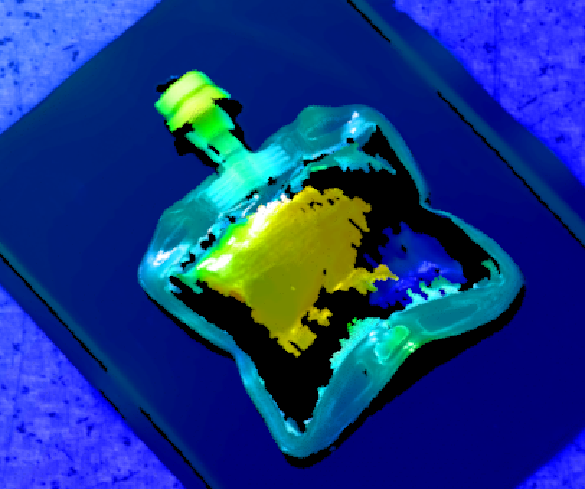
透明物体の深度データの品質改善
PRO S(V4)と PRO M(V4)カメラファームウェアを 2.2.1 バージョンにアップグレードした後の 3D パラメータクラスのコーディングモードパラメータに Translucent オプションを追加しました。生理食塩液バッグなど透明物体の深度データの品質を大幅に改善できます。
| 対象物 | Translucent | その他のオプション |
|---|---|---|
|
|
|
|
|
|

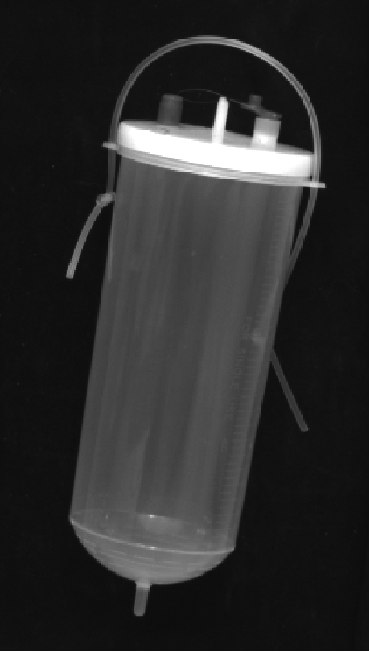


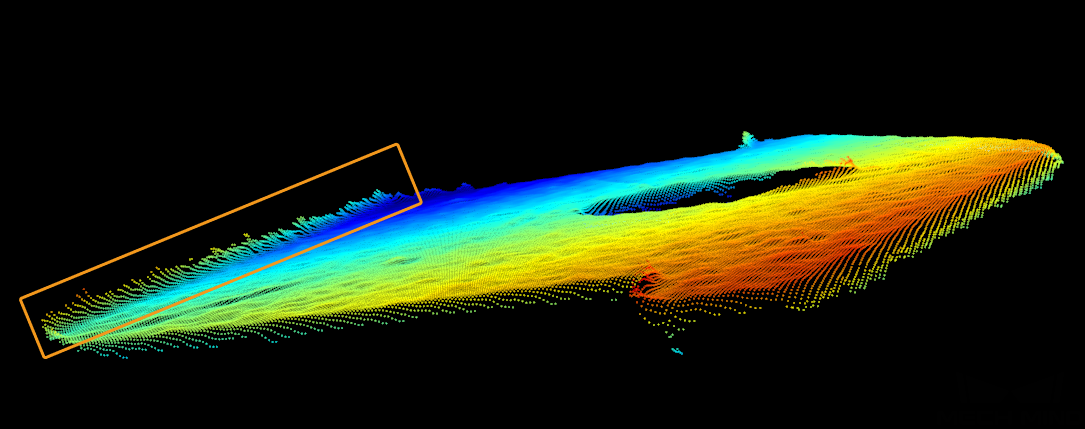
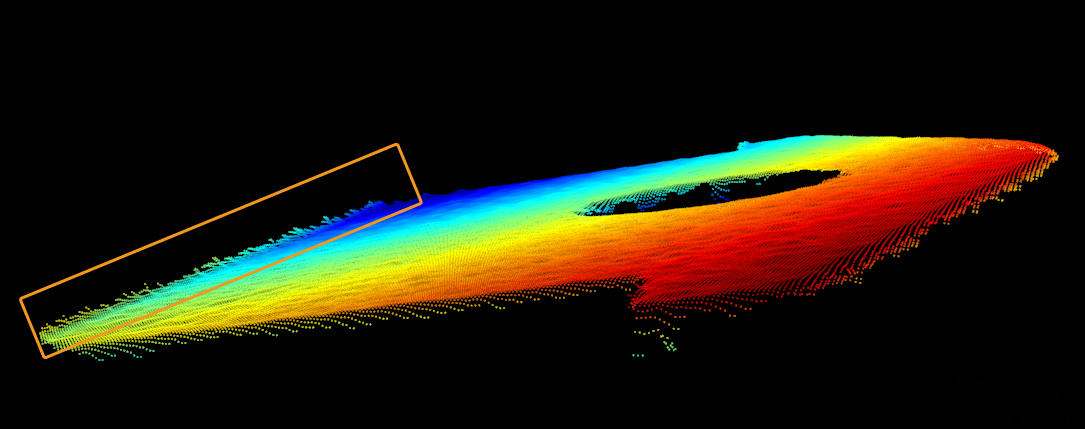
深度データの歪み補正
PRO S(V4)と PRO M(V4)、UHP-140(V4)カメラファームウェアを 2.2.1 バージョンにアップグレードした後の点群後処理クラスに歪み補正パラメータを追加しました。対象物の色や高さの激しい変動による深度データの歪みを補正できます。
| 対象物 | 歪み補正を使用しない | 歪み補正を使用する |
|---|---|---|
|
|
|

収集情報の表示
Mech-Eye Viewer 2.2.1 バージョンに収集情報パレットを追加し、今回の収集にかかった時間や収集した画像の解像度、カメラ CPU とプロジェクターの温度などが確認できます。
深度画像グリッド
Mech-Eye Viewer 2.2.1 バージョンに深度画像グリッドを追加し、深度画像に 2 × 2 または 3 × 3 のグリッドを表示して視野の中心を確認することができます。
Mech-Eye API
新機能
レフト・ライト 2D カメラから 2D 画像の取得
Deep(V3)や Laser L Enhanced(V3)、Pro XS(V3)、LSR L(V4)、LSR S(V4)、DEEP(V4)カメラを使用する時、以下のメソッドを使用することでレフト・ライト 2D カメラから 2D 画像または 2D 画像(深度ソース)を取得することができます。
| サンプルプログラムは、インストールパスまたは GitHub から入手できます。各言語の使用ガイドについては、サンプルプログラム使用ガイドをお読みください。 |
-
C++
-
C#
-
Python
mmind::eye::Frame2D stereoLeft, stereoRight;
camera.captureStereo2D(stereoLeft, stereoRight, false);Frame2D left = new Frame2D();
Frame2D right = new Frame2D();
camera.captureStereo2D(ref left, ref right)stereo_left = Frame2D()
stereo_right = Frame2D()
self.camera.capture_stereo_2d(stereo_left, stereo_right)透明物体の深度データの品質改善
PRO S(V4)と PRO M(V4)カメラファームウェアを 2.2.1 バージョンにアップグレードした後の 3D パラメータクラスのコーディングモードパラメータに Translucent オプションを追加しました。生理食塩液バッグなど透明物体の深度データの品質を大幅に改善できます。
| 対象物 | Translucent | その他のオプション |
|---|---|---|
|
|
|
|
|
|
深度データの歪み補正
PRO S(V4)と PRO M(V4)、UHP-140(V4)カメラファームウェアを 2.2.1 バージョンにアップグレードした後の点群後処理クラスに歪み補正パラメータを追加しました。対象物の色や高さの激しい変動による深度データの歪みを補正できます。
| 対象物 | 歪み補正を使用しない | 歪み補正を使用する |
|---|---|---|
|
|
|
GenICam インターフェース
新機能
透明物体の深度データの品質改善
PRO S(V4)と PRO M(V4)カメラファームウェアを 2.2.1 バージョンにアップグレードした後の 3D パラメータクラスのコーディングモードパラメータに Translucent オプションを追加しました。生理食塩液バッグなど透明物体の深度データの品質を大幅に改善できます。
| 対象物 | Translucent | その他のオプション |
|---|---|---|
|
|
|
|
|
|
深度データの歪み補正
PRO S(V4)と PRO M(V4)、UHP-140(V4)カメラファームウェアを 2.2.1 バージョンにアップグレードした後の点群後処理クラスに歪み補正パラメータを追加しました。対象物の色や高さの激しい変動による深度データの歪みを補正できます。
| 対象物 | 歪み補正を使用しない | 歪み補正を使用する |
|---|---|---|
|
|
|