Solution Deployment FAQs
This section introduces the common problems, possible causes, and solutions for the Round Steel Billets solution.
Problem 1: Long Path Planning Time
Possible Causes
-
The pose sequence output by Mech-Vision is unreasonable, leading to an increased number of path-planning failures in Mech-Viz.
-
There is a problem with the Mech-Viz project parameter configuration.
-
Multiple unnecessary attempts based on the rotational symmetry were made when using Mech-Viz for path planning.
Solution
-
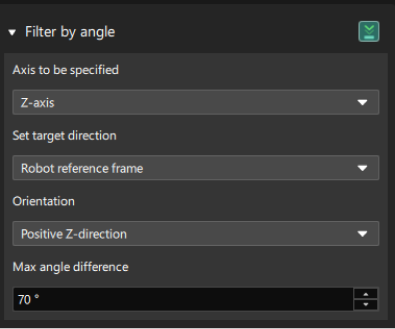
Use the pose adjustment tool to filter poses, such as using the Filter by angle method to filter out poses with inappropriate picking angles.
-
Disable time-consuming and unnecessary features in Mech-Viz, such as turning off the switch next toProblem One under Solutions to common problems in the Collisions functional panel, i.e., do not remove the point cloud of the target object.

-
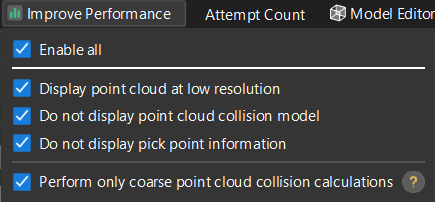
Make sure that all options under Improve Performance in the Mech-Viz toolbar are selected.
-
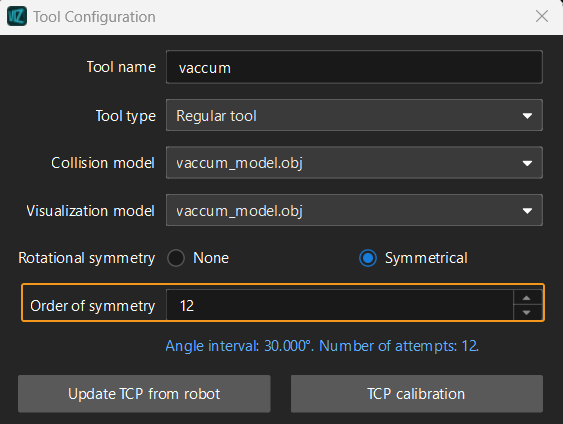
When configuring end tools, set the Order of symmetry value according to the actual situation, reducing unnecessary picking attempts.
Problem 2: Low Matching Accuracy in Z-Direction

Question 3: Path Planning Failure
Possible Causes
-
The target object poses output by Mech-Vision are beyond the robot workspace.
-
The waypoint settings in Mech-Viz are unreasonable, resulting in collisions between the robot and scene objects.
-
When picking a target object with a tool, the tool collides with the point cloud representing the target object surface and the collision volume exceeds the Collision detection threshold.
Solution
-
Check if the target object poses output by Mech-Vision are correct.
-
Add appropriate intermediate waypoints in Mech-Viz according to the actual situation.
-
Consider whether collisions are allowed when the tool picks the target object.
-
If collisions are allowed, turn on the switch on the right of Problem 2 under Solutions to common problems in the Collisions functional panel and set the Non-detection range. Once this option is enabled, point cloud collisions in the adjacent area to the pick point will not be detected.

-
If collisions are not allowed, check if the Collision detection threshold is too small. If this parameter value is appropriate, but the target object does collide with the tool, other picking strategies may be considered.
-
Problem 4: Point Cloud Model Matching Failure or Missed Recognition of Target Object
Symptom
During point cloud model matching, there are instances of matching failures or missed target objects.

Possible Causes
-
The maximum number of poses obtained by matching has been reached.
-
The score of the matched pose is below the Confidence threshold.
-
Some target objects are overlapped by others and the Overlap ratio threshold is exceeded, leading to missed recognition.
-
Missing points in the target object point cloud results in missed recognition.
Solution
-
Adjusts the value of the Max outputs parameter.
-
Adjust the value of the Confidence threshold parameter according to the actual situation to remove the lower score poses.
-
In actual applications, a larger Coincidence ratio threshold and Overlap ratio threshold can be used if picking of the overlapped and coinciding target objects is allowed.