Solution Design
This section introduces the solution design of the Long Sheet Metal Parts solution, including the workflow of the vision system, software combination, camera model selection, and calibration board selection.
Workflow of the Vision System
The workflow of the vision system is shown in the figure below.

This solution needs to be implemented in three steps:
-
First, use LSR XL to locate the bin in which the long sheet metal parts are placed. This step corresponds to the Vis-Bin Positioning project in Mech-Vision.
-
Second, use LSR XL to locate the image-capturing point for PRO S (the image-capturing point in the third step of the workflow above) and send it to the robot. This step corresponds to the Vis-Camera Positioning project in Mech-Vision.
-
Third, use PRO S to recognize and pick target objects. The visual recognition part corresponds to the Vis-Workpiece Positioning project in Mech-Vision.
After configuring the visual recognition project, you can run the modified robot picking program to guide the robot to accurately pick the neatly arranged long sheet metal parts, automating the material supply.
Software Combination
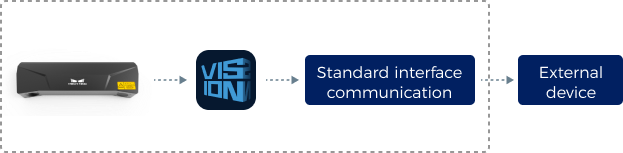
This solution uses Mech-Vision to recognize the poses of long sheet metal parts and plan the path for picking them.
As shown below, Mech-Viz plans a robot picking path based on the pose and returns it to an external device (such as a robot, PLC, etc.) through Standard Interface communication.
Select Camera and Determine Mounting Height
Select Camera Model
For loading long sheet metal parts, Mech-Eye LSR XL Industrial 3D Camera (hereinafter referred to as LSR XL) and Mech-Eye PRO S Industrial 3D Camera (hereinafter referred to as PRO S) are recommended, based on the camera’s field of view, accuracy and working distance.
LSR XL features high camera accuracy, large field of view, and excellent resistance to ambient light. Imaging stability is ensured when the target object is highly reflective. In this solution, the camera is used to locate the bin and output the image-capturing point for PRO S. For detailed technical specifications of the camera, please refer to LSR XL Technical Specifications.
PRO S features high camera accuracy, fast speed, and excellent resistance to ambient light. In this solution, the camera is mounted on the end of the robot and is used to collect data of the long sheet metal parts in the bin, making it easier for the vision system to process the data and output the target object poses. For detailed technical specifications of the camera, please refer to PRO S Technical Specifications.
If you need to use a camera of other models, please use the 3D Camera Selector to select the appropriate model.
Calculate Camera Mounting Height
After determining the camera model, please use the 3D Camera Selector to determine the mounting height of LSR XL. Follow the steps below:
-
Determine the dimensions of the objects on the top layer and the possible maximum height, and fill in the Length, Width, and Height in the Object dimensions panel.
To accommodate deviations in the position of the incoming objects, a margin of 150–200 mm should be left on each side of the top layer, as shown below. Namely, the length and height values should equal the dimensions of the top layer of the objects plus the reserved margin shown in the figure below.

-
Turn on the switch to the right of Distance from camera to object and keep adjusting the parameter value until the square on the right that represents the object is at the center of the camera FOV and is completely covered, i.e., the square becomes green.

-
Mounting height = Distance from camera to object + object height.
| PRO S is mounted on the end of the robot and moves with the robot. There is no need to calculate its mounting height. |
Select Calibration Board
-
LSR XL
-
When the working distance is 1600–3000 mm, the recommended calibration board model is CGB-050.
-
-
PRO S
-
When the working distance is 500–800 mm, the recommended calibration board model is CGB-020.
-
When the working distance is 800–1000 mm, the recommended calibration board model is CGB-035.
-
Select IPC Model
The recommended IPC is Mech-Mind IPC ADV, which is suitable for scenarios using the Deep Learning Model Package Inference Step.
Select Robot Model
In the Long Sheet Metal Parts solution, a high-load, high-accuracy six-axis robot should be selected based on the requirements for the picking range and accuracy. In this solution, KUKA_KR_210_R3100_ULTRA_ULTRA_F is used as an example.
For robots of other brands, please refer to Robot Model Selection.
Workstation Layout Design
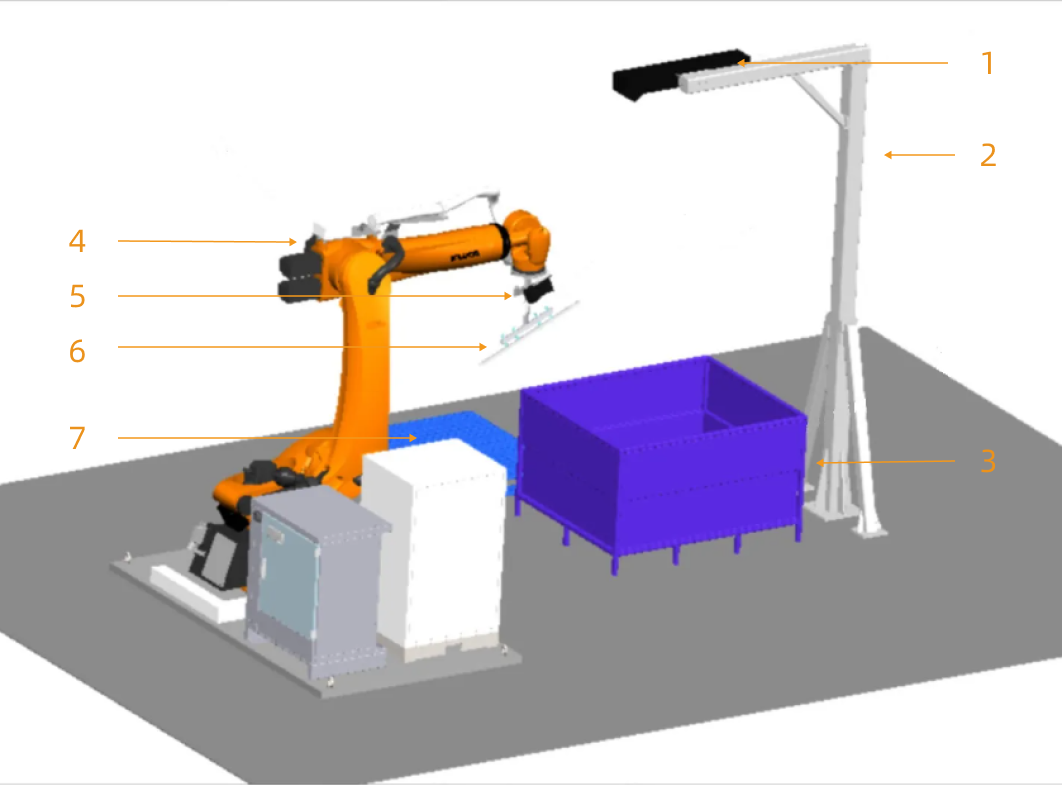
The layout of the on-site workstation is shown in the figure below. LSR XL is mounted 3 meters directly above the part tray. PRO S is mounted on the end of the robot, which allows the camera to acquire point clouds of all target objects after capturing images. The items in the figure are: 1-LSR XL; 2-camera mounting frame; 3-bin; 4-robot; 5-PRO S; 6-robot tool; 7-palletizing point.
Robot Tool Design
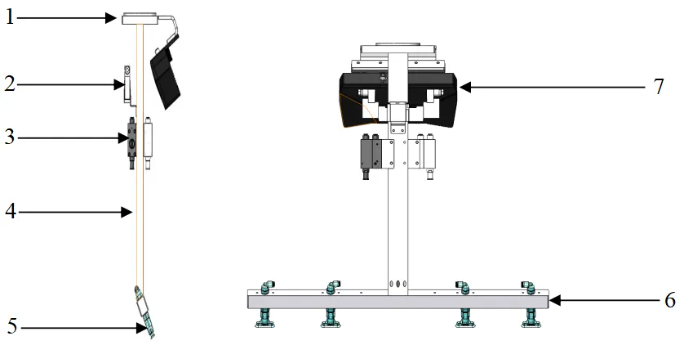
Two types of tools are commonly used to pick long sheet metal parts: vacuum grippers and magnetic grippers. The application scenarios, structures, and advantages and disadvantages of the two types of grippers are shown in the table below:
| Type | Vacuum gripper | Magnetic gripper |
|---|---|---|
Application scenario |
The target object surface is clean and flat, without holes. |
The target object is ferromagnetic, with no or a small number of holes in the surface. |
Illustration |
|
|
Structure |
1-Flange; 2-Control valve; 3-Vacuum generator; 4-Connecting rod; 5-Suction cup; 6-Suction cup mounting frame; 7-3D camera |
1-Flange; 2-Electromagnet; 3-Magnet accessory; 4-Buffering mechanism; 5-Camera mounting frame; 6-3D camera |
Advantages |
|
|
Disadvantages |
|
|
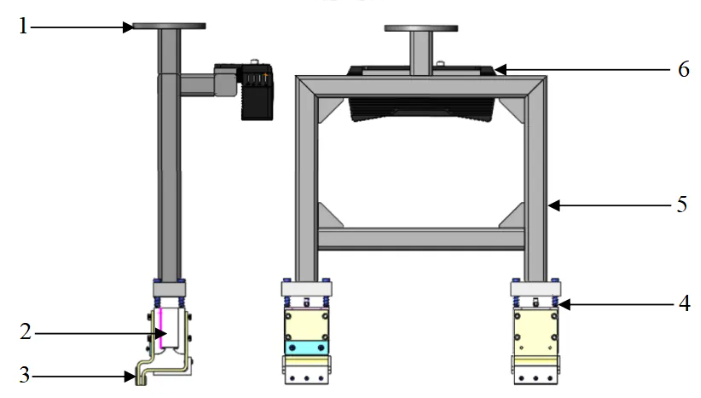
Since the long sheet metal parts have holes and are made of ferromagnetic material, it is recommended to use a magnetic gripper in this solution.