Getting Started
This section will introduce how to easily depalletize single-case cartons from a beginner’s perspective. The overall process is shown in the figure below.

Robot Communication Configuration
Before robot communication configuration, it is necessary to obtain the solution first. Click here to see how to obtain the solution.
-
Open Mech-Vision.
-
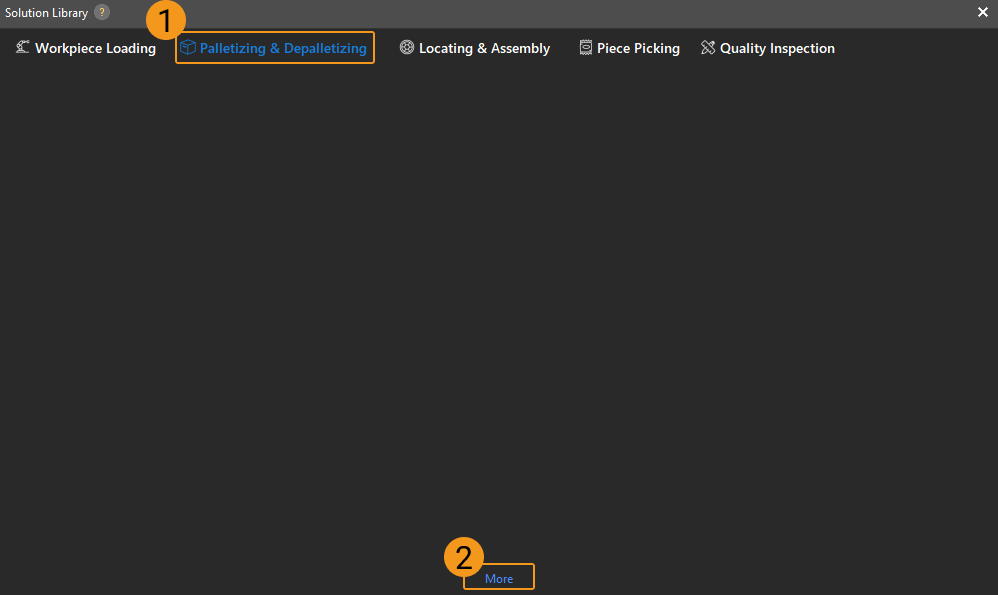
In the Welcome interface of Mech-Vision, click Create from solution library to open the Solution Library.

-
Click Palletizing & Depalletizing in the Solution Library, then click on More at the bottom, and click Yes in the pop-up window.
-
After acquiring the solution resources, select Single-Case Cartons V2. Then, fill in the Solution name and Path at the bottom, and finally click Create to download the Single-Case Cartons V2 depalletizing solution.
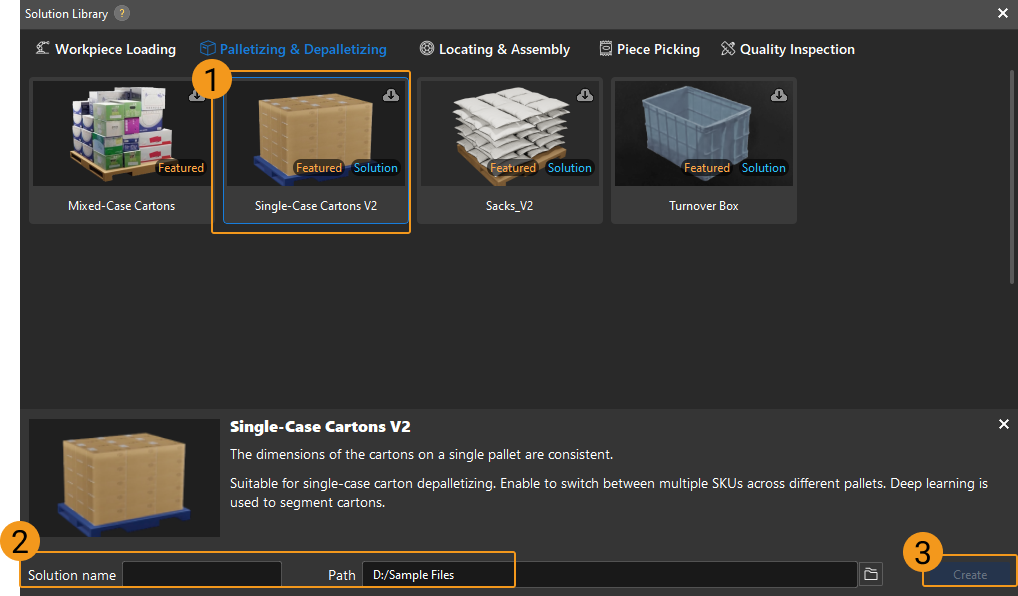
Once the solution is downloaded, it will be automatically opened in Mech-Vision.
When deploying a Mech-Mind vision solution, you need to set up the communication between the Mech-Mind Vision System and the robot side (robot, PLC or host computer).
The Single-Case Carton depalletizing solution uses Standard Interface communication. For specific operations, please refer to Standard Interface Communication Configuration.
Hand-Eye Calibration
Hand-eye calibration establishes the transformation relationship between the camera and robot reference frames. With this relationship, the object pose determined by the vision system can be transformed into that in the robot reference frame, which guides the robot to perform its tasks.
Please refer to Hand-Eye Calibration Guide to complete hand-eye calibration.
|
Every time the camera is mounted, or the relative position of the camera and the robot changes after calibration, it is necessary to perform hand-eye calibration again. |
Vision Project Configuration
After completing the communication setup and hand-eye calibration, you can use Mech-Vision to locate cartons. The process for carton locating is shown in the figure below.

Connect to the Camera and Capture Images
-
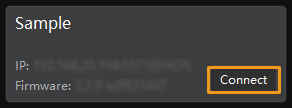
Connect to the camera.
Run Mech-Eye Viewer, find the camera to be connected, and then click Connect.
-
Set parameter group.
Click the dropdown arrow next to the Parameter Group on the right-hand side and select the Typical carton depalletizing.
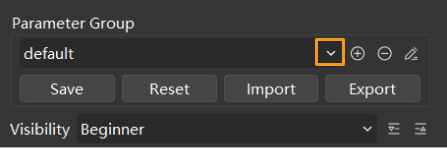
In addition to the default parameter group, Mech-Eye Viewer will also display parameter groups of other typical solutions.
-
Capture image data.
After the camera is successfully connected and the parameter group is set, you can start to capture carton images. Click the
 button on the top to capture a single image. At this time, you can view the captured 2D image and point cloud of the carton. Ensure that the 2D image is clear, the carton point cloud is intact, and the edges are clear. The qualified 2D image and point cloud of the carton are shown on the left and right in the figure below respectively.
button on the top to capture a single image. At this time, you can view the captured 2D image and point cloud of the carton. Ensure that the 2D image is clear, the carton point cloud is intact, and the edges are clear. The qualified 2D image and point cloud of the carton are shown on the left and right in the figure below respectively.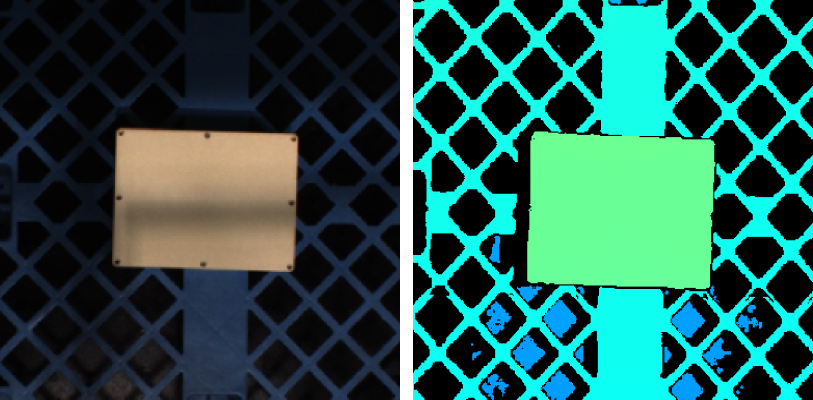
-
Add a camera in Mech-Vision.
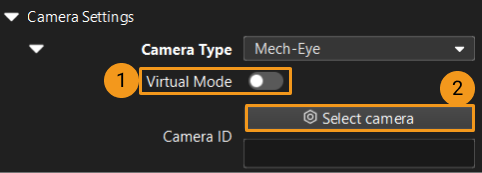
Click the Capture Images from Camera Step, disable the Virtual Mode option in the Step parameters tab, which is located in the lower right corner of the interface, and then click Select camera.
In the pop-up window, click the
 button on the right of the camera serial number. When the button turns into
button on the right of the camera serial number. When the button turns into  , the camera is connected successfully.
, the camera is connected successfully.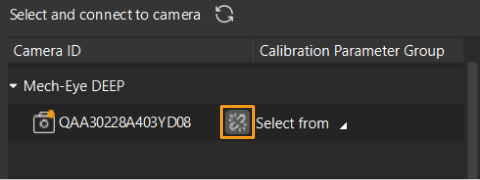
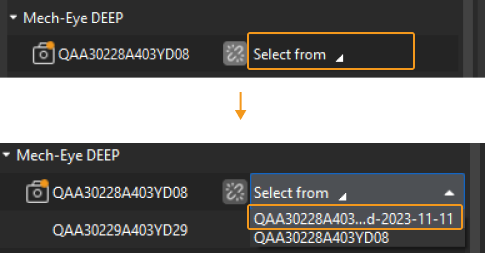
After that, you can click Select from and select the corresponding camera calibration parameter group, as shown below.
Once the above settings are complete, you can connect to a real camera. Other parameters can remain at their default values. Click the
 button on the right of the “Capture Images from Camera” Step to run this Step. If no error message occurs, the camera is connected successfully and images can be captured normally.
button on the right of the “Capture Images from Camera” Step to run this Step. If no error message occurs, the camera is connected successfully and images can be captured normally.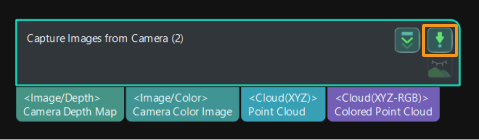
Get Highest-Layer Cartons
Set 3D Region of Interest (ROI)
-
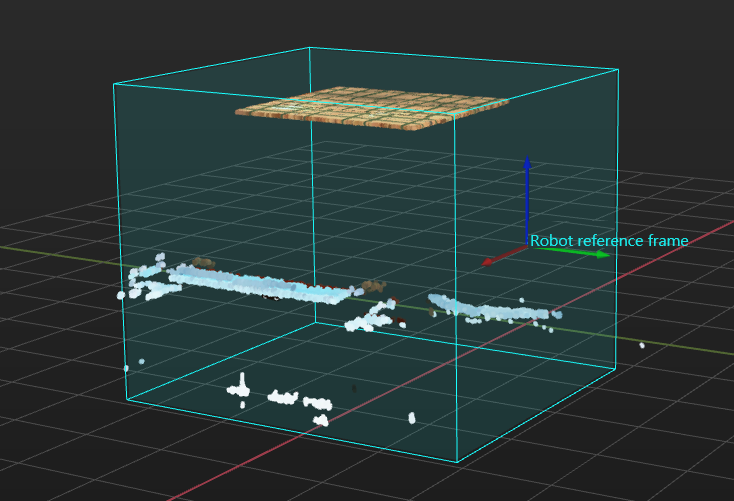
Select the Procedure(Point Cloud Preprocessing & Get the Mask of the Highest Layer), then click the Open the editor button in the ”Step Parameters” tab to open the Set 3D ROI window.

-
In the “Set 3D ROI” window, drag the default generated 3D ROI in the point cloud display area to a proper position. Make sure that the highest and lowest areas of the carton stack are within the green box at the same time, and that the green box does not contain other interfering point clouds, as shown in the following figure.
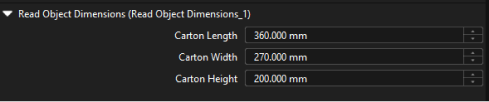
Set Box Size
Select the Point Cloud Preprocessing & Get the Mask of the Highest Layer Procedure, then fill in the Box Length, Box Width, Box Height in sequence.
|
This Procedure extracts the point clouds of the highest layer cartons according to the height of these cartons. If the Box Height you set is greater than that, it will lead to an error in the point cloud extraction of the highest layer cartons. |
Segment Individual Cartons
-
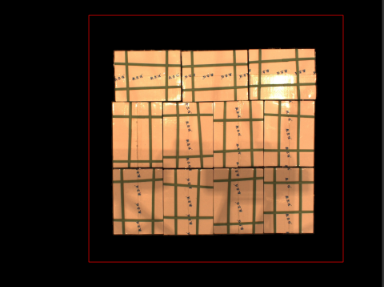
Select the Segment Masks of Individual Cartons Using Deep Learning Procedure, then click the Open the editor button next to ROI Path to open the Set ROI window.

-
Set the 2D ROI on the “Set ROI” panel. The 2D ROI needs to cover the highest-layer cartons, leaving an appropriate margin of about one-third, as shown in the figure below.
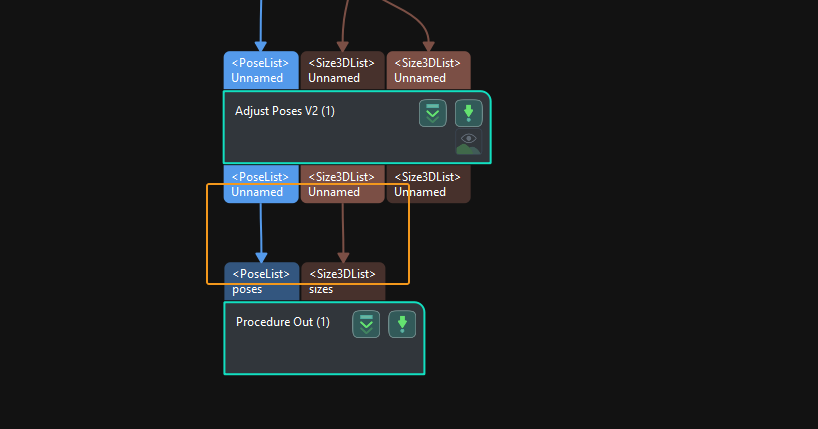
Calculate Carton Poses and Dimensions
The Calculate Carton Poses Procedure is used to calculate the poses and dimensions of cartons. There is no need to set parameters for this Procedure.
Picking
Once the carton recognition is complete, you can use Mech-Viz to plan a path and then write a robot program for carton picking.
Path Planning
The process of path planning is shown in the figure below.

|
The Standard Interface communication is used for path planning in the single-case carton depalletizing solution. For more information about the path planning under the Master-Control communication, please download the Viz_Single_Case_Cartons.zip. |
Configure Scene Objects
Scene objects are introduced to make the scene in the software closer to the real scenario, which facilitates the robot path planning. For specific operations, please refer to Configure Scene Objects.
Configure the Tool
The end tool should be configured so that its model can be displayed in the 3D simulation area and used for collision detection. For specific operations, please refer to Configure the Tool.
Adjust the Workflow
The workflow refers to the robot motion control program created in Mech-Viz in the form of a flowchart. After the scene objects and end tools are configured, you can adjust the workflow.
In the introductory stage, you only need to adjust the Home Point Step in the workflow, and there is no need to set parameters for other Steps.


Write a Robot Program
If the simulation results meet expectations, you can write a Standard Interface program.
Please refer to the picking example program and interface commands in Standard Interface Communication to learn how to write the robot program.
So far, you have learned how to get started with carton picking.