Troubleshooting
This section introduces the common problems, possible causes, and solutions for the neatly arranged cylindrical shaft loading solution.
Problem 1: 3D Matching Failure with Abnormal Output Poses.
Symptom
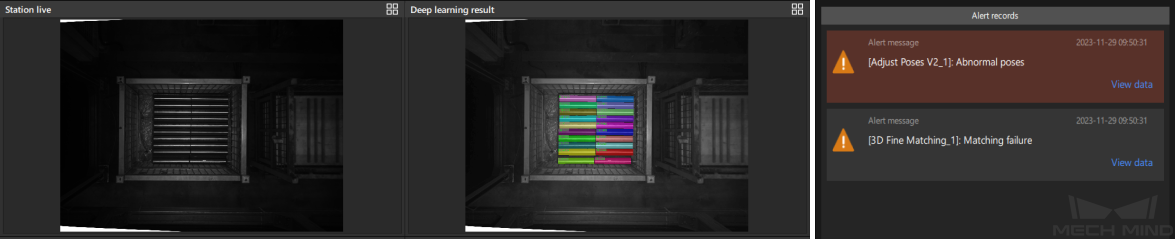
The “Station live” in the production interface showed that there were workpieces, and the “Deep learning result” was normal (as shown in the left figure below), but Mech-Vision project did not output recognition results and picking results, resulting in an alarm message saying matching failure and abnormal poses (as shown in the right figure below).
Problem 2: Abnormal Vision Recognition Results
Symptom
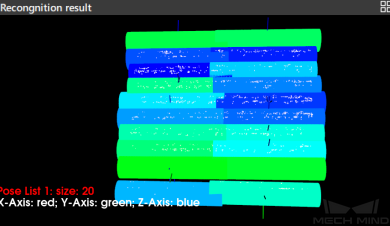
The “Recognition result” in the production interface showed overlapping workpieces and a mismatch between the sizes of the color point cloud model and the white workpiece point cloud.

Problem 3: Abnormal Masks Obtained from Deep Learning

Possible Causes
-
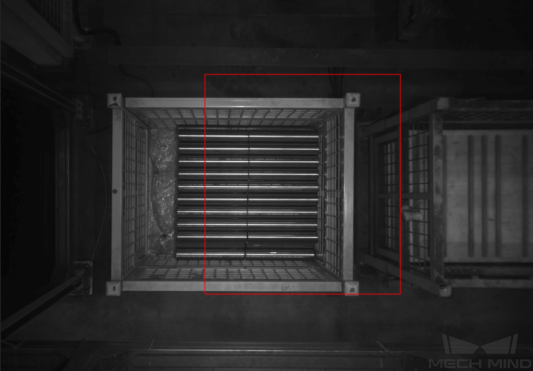
The setting of deep learning recognition region (2D ROI) was incorrect.
-
When acquiring a 2D image, the exposure time was not set properly, resulting in the 2D image being too bright or too dark.

-
A stable recognition of the current workobject using the deep learning model was not available.
Solutions
-
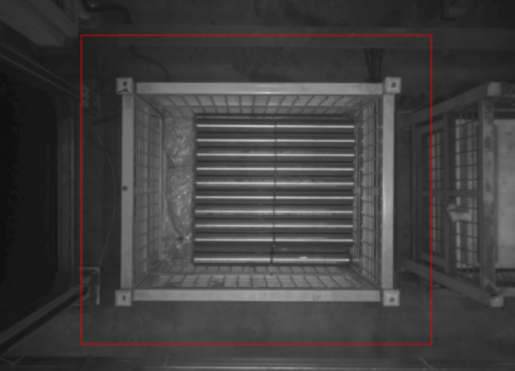
Reset 2D ROI. Ensure that the set ROI enclose the entire upper surface of the bin and there are as few interfering points in the ROI as possible.
-
Adjust the exposure time of the camera to ensure that the acquired 2D images are normal.

-
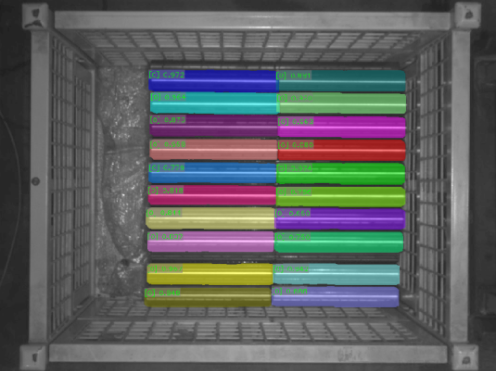
Acquire shaft image data to iterate your deep learning model. A normal deep learning recognition is shown in the figure below.
Problem 4: Path Planing Failure Resulting in Robot Colliding with Scene Object
Symptom
When using Mech-Viz to run the project, you were informed that “the path planning fails, and there is a collision with the scene object.”
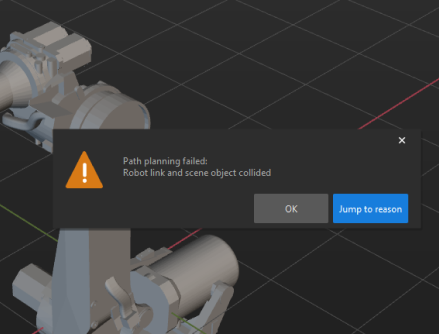
Solution
Review the plan history to check at which Step the collision occurred and then adjust the waypoints according to the site layout.
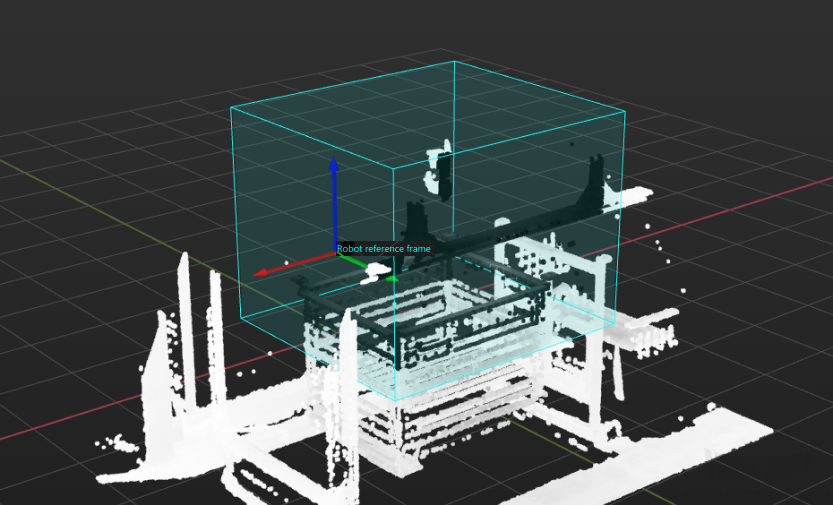
For example, in the Above-Bin Fixed Waypoint after Picking Step, the robot collides with the bin, as shown in the following figure.
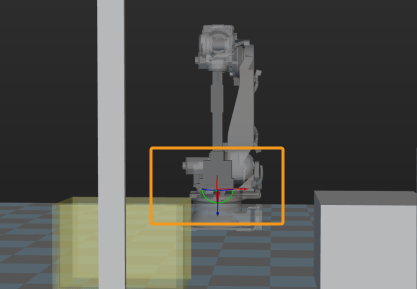
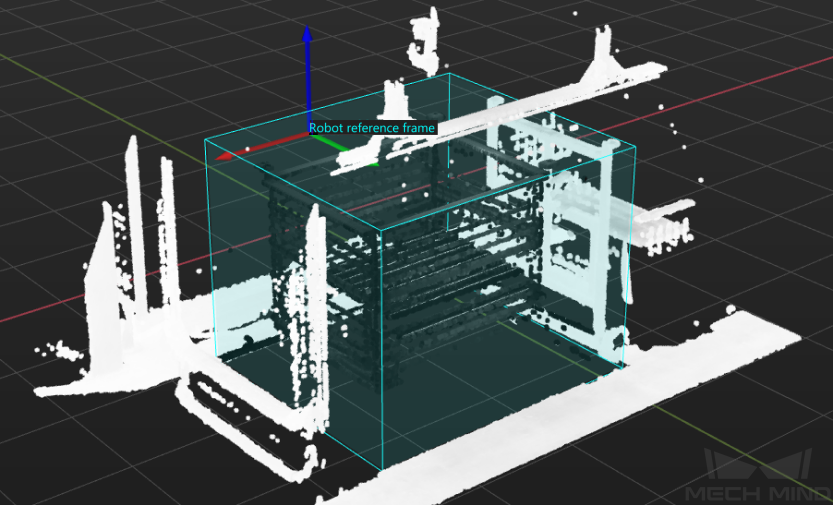
Then you should adjust the Above-Bin Fixed Waypoint after Picking Step to set the corresponding waypoints above the bin, as shown in the following figure.