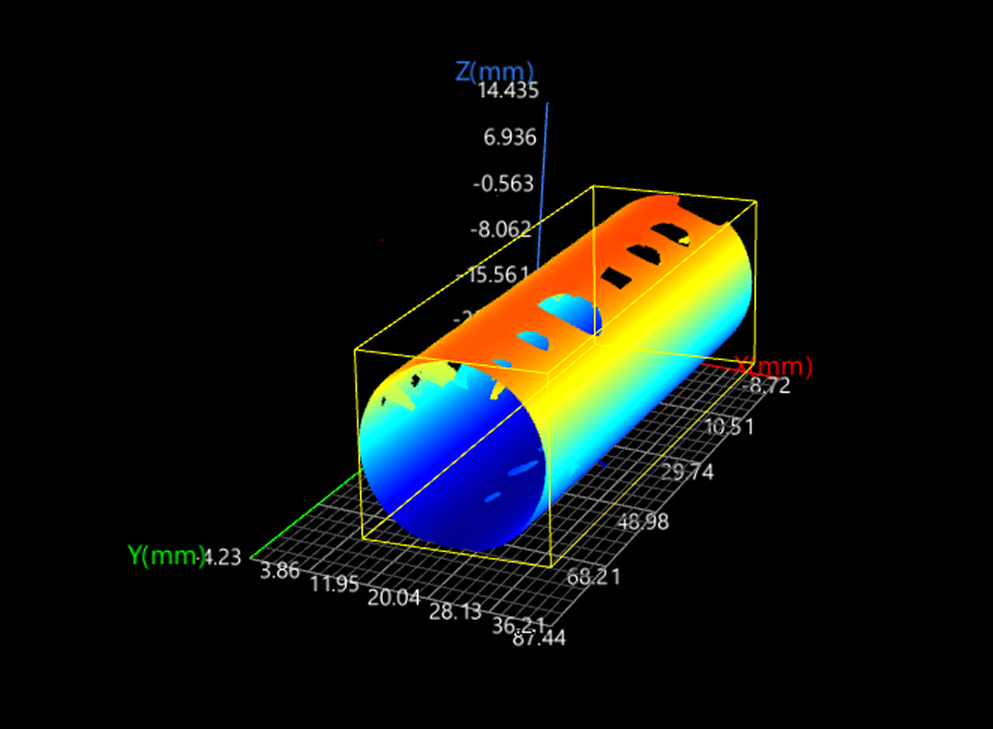
生成点云包围盒
使用流程
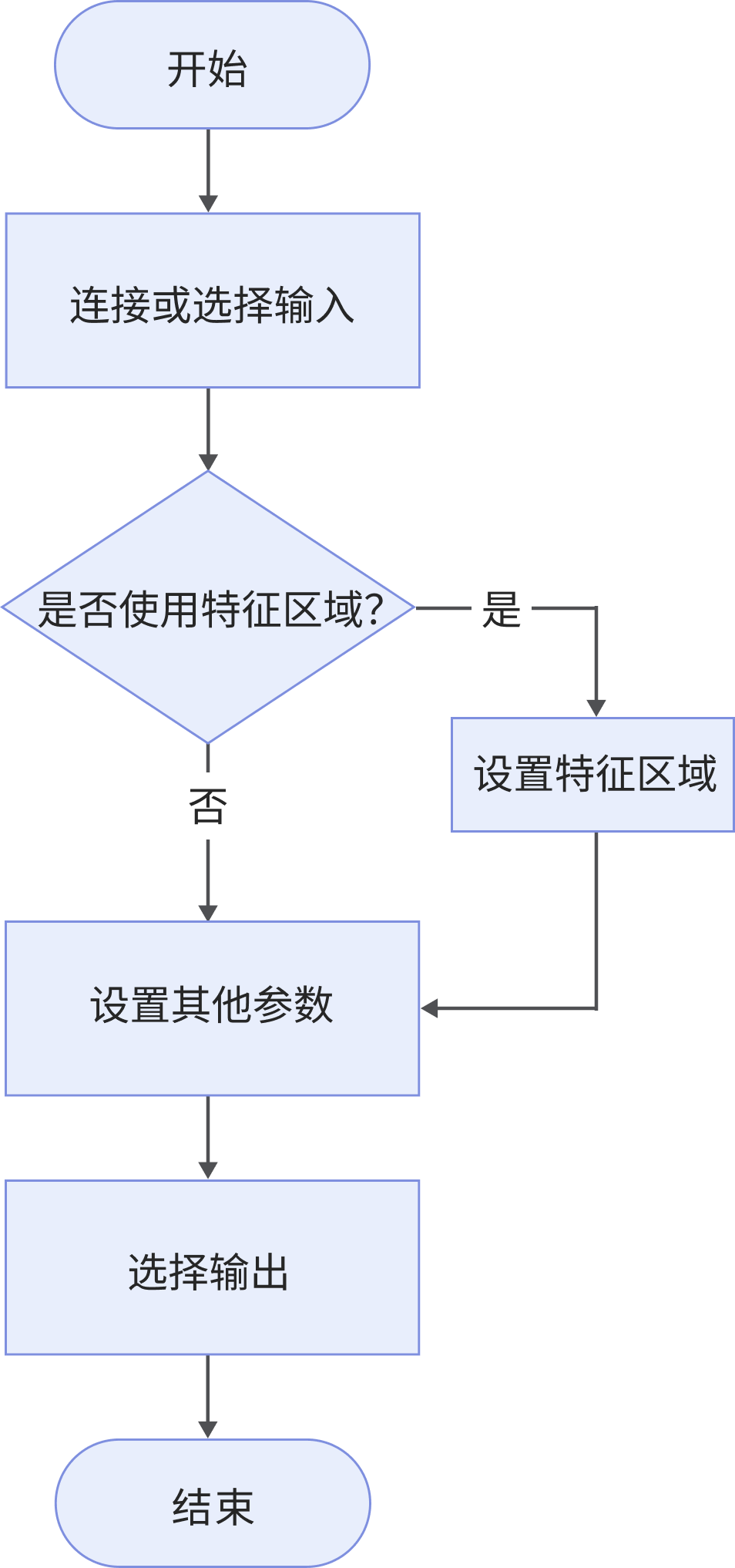
该步骤的使用流程如下:
-
选择输入数据。连接对应的步骤端口,或者在参数设置区的输入栏下选择对应的输入数据。
-
明确是否使用特征区域。
-
设置其他参数。
-
在输出栏中勾选输出项,并单击输出项左侧的 ▶ 展开该项,输入合格范围的最小值和最大值。
参数说明
| 参数 | 解释 | ||
|---|---|---|---|
使用特征区域 |
未勾选时,将对整个点云生成最小体积包围盒。 勾选后,可设置一个或多个特征区域。步骤仅对特征区域内的点云生成包围盒。 |
||
点云降采样 |
该参数用于确定是否在计算点云包围盒之前对点云进行降采样。当点云非常密集时,可使用降采样减少点数,提高计算效率。 勾选后,需要设置体素大小: 降采样时,点云空间被划分为立方体素(3D网格),每个体素内的所有点会被简化为一个点。体素越大,处理速度越快,但可能导致更多细节丢失、包围盒增大;体素越小,保留的细节越多,但处理速度越慢。
|
||
欧拉角旋转顺序 |
用于指定包围盒绕坐标轴旋转的先后顺序。该参数不会影响包围盒的尺寸和位置,仅影响步骤输出的角度值。 默认值:自适应。系统自动选择最佳旋转顺序。 值列表:自适应、X→Y→Z、X→Z→Y、Y→X→Z、Y→Z→X、Z→X→Y、Z→Y→X |
输出说明
| 参数 | 解释 | ||
|---|---|---|---|
点云包围盒 |
紧密包裹点云的最小体积包围盒。 |
||
中心点X坐标 中心点Y坐标 中心点Z坐标 |
包围盒的几何中心坐标,表示包围盒在三维空间中的位置。单位为毫米(mm)。 |
||
绕X轴旋转角度 绕Y轴旋转角度 绕Z轴旋转角度 |
分别对应包围盒相对于世界坐标系绕X、Y、Z轴的旋转角度(即欧拉角),受欧拉角旋转顺序参数影响。单位为度(°)。 |
||
宽度(X) 长度(Y) 高度(Z) |
分别对应包围盒在其局部坐标系中X、Y、Z方向上的尺寸。单位为毫米(mm)。 |
||
包围盒体积 |
包围盒所包围的三维空间体积。单位为立方毫米(mm3)。 |
||
包围盒中心点 |
输出为一个特征点,位于包围盒的几何中心。 |
||
包围盒X轴线 包围盒Y轴线 包围盒Z轴线 |
分别对应包围盒在其局部坐标系中的X、Y、Z轴,且穿过包围盒的几何中心。
|
错误排查
|