单组标定
在Mech-MSR主界面的工具栏,单击多轮廓测量仪标定按钮,在弹出的窗口中单击已完成准备工作按钮。然后,选择单组标定选项,单击开始标定按钮,正式进入多轮廓测量仪标定窗口。
| 多轮廓测量仪标定功能在打开方案后可用,标定结果适用于该方案下的所有工程。 |
 连接轮廓测量仪
连接轮廓测量仪
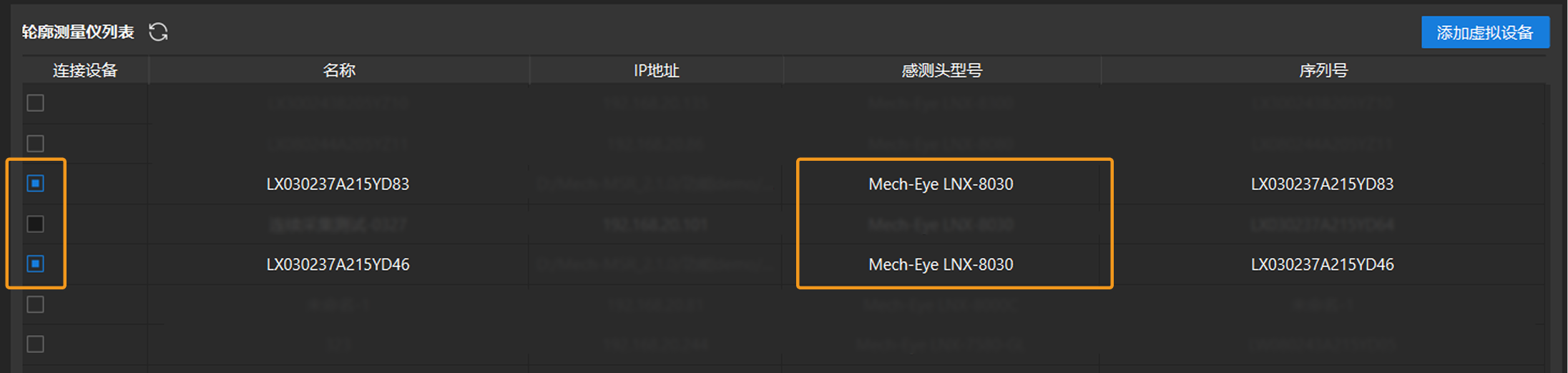
即将组网的轮廓测量仪应使用同一型号的感测头。你可以在连接设备栏下选中设备以完成连接。
|
连接轮廓测量仪后,单击下一步按钮进入布局设置页面。
 选择布局
选择布局
支持选择并列、对向、对射和环形布局。根据实际搭建场景选择布局后,需确定轮廓测量仪的感测头的摆放顺序以及标定块与感测头的相对运动关系。
-
确定轮廓测量仪编号
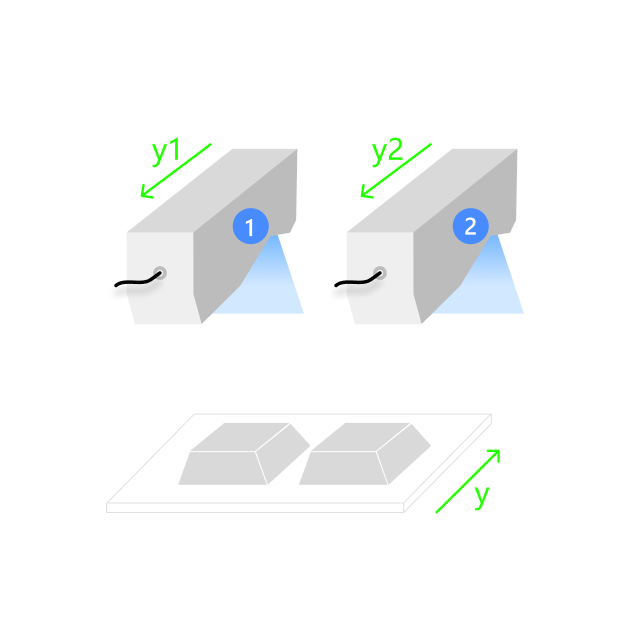
轮廓测量仪编号必须正确。确定主轮廓测量仪(1号)后,其他轮廓测量仪采集的数据将变换至该设备的数据坐标系下;若编号错误,标定结果也将错误。 布局 说明 图示 并列
轮廓测量仪的感测头在上,标定块在下。站在顺沿标定块逐渐远离自己的方向面对感测头,从左到右为感测头升序编号,以最左侧感测头为主(编号为1)。
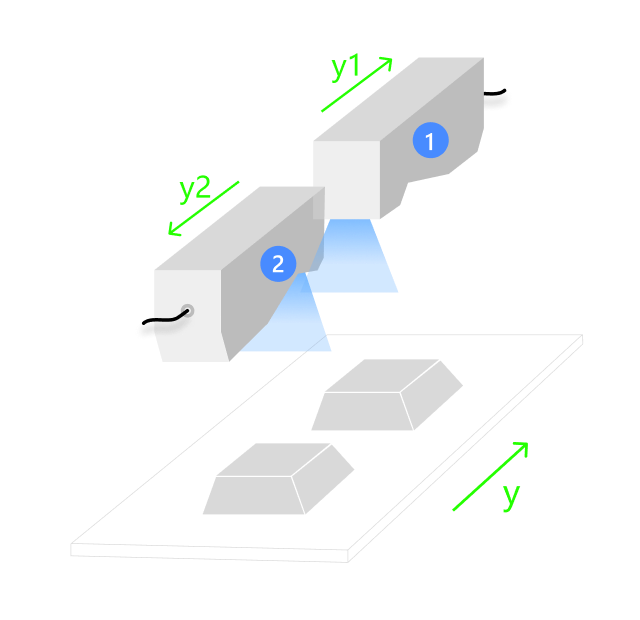
对向
轮廓测量仪的感测头在上,标定块在下。站在顺沿标定块逐渐远离自己的方向面对感测头,由远及近为感测头升序编号,以较远的感测头为主(编号为1)。
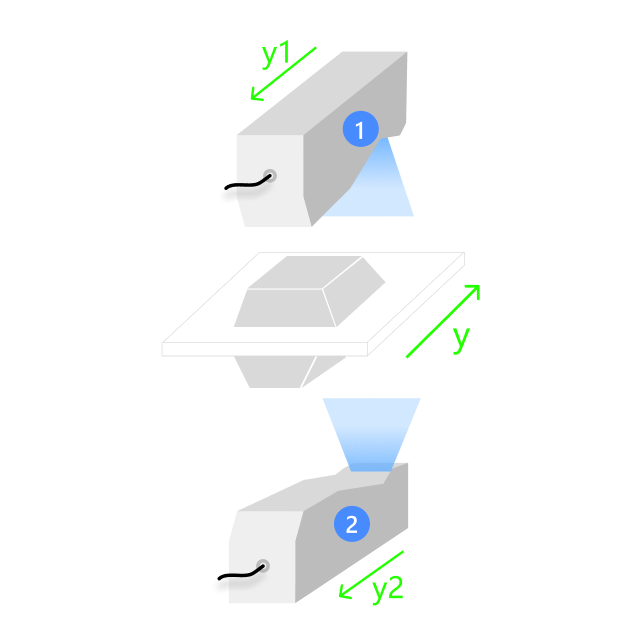
对射
站在顺沿标定块逐渐远离自己的方向面对感测头,从上到下为感测头升序编号,以上方感测头为主(编号为1)。
环形
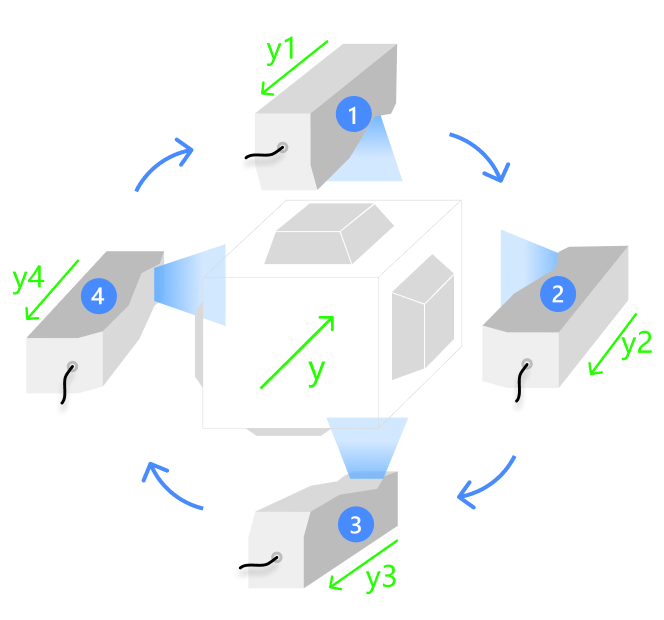
沿标定块运动方向面对感测头,按顺时针方向为感测头编号,编号1代表主轮廓测量仪。
-
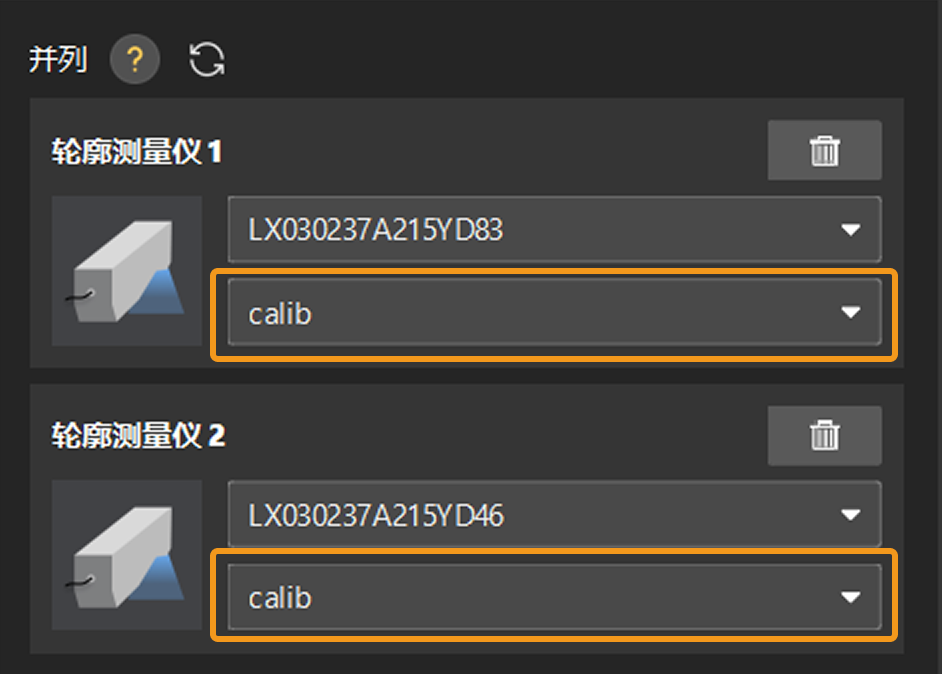
选择正确的参数组
请选择在Mech-Eye Viewer中保存的参数组。
-
各台轮廓测量仪的触发设置(触发延迟除外)、分辨率设置必须完全一致,且均未启用轮廓对齐、校正、滤波功能。如不满足要求,请在Mech-Eye Viewer中重新调整参数,保存至参数组后再返回Mech-MSR进行标定。
-
若在Mech-Eye Viewer中对参数进行了调整,可单击刷新图标
 更新参数组。
更新参数组。 -
若轮廓测量仪的视野有重叠,各台轮廓测量仪同时发射激光将互相干扰。此时,可为其中一台设备设置触发延迟参数以解决该问题。
-
-
确定轮廓测量仪与标定块的相对运动关系
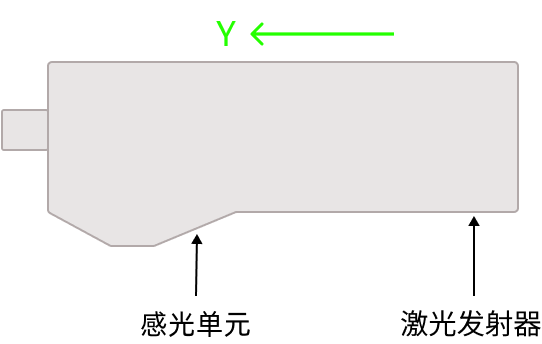
轮廓测量仪本身的Y轴方向固定,为感测头的激光发射器到感光单元的方向。
标定块的运动方向与运动平台的方向相同;若标定块静止,则标定块的运动方向为相对感测头的运动方向。
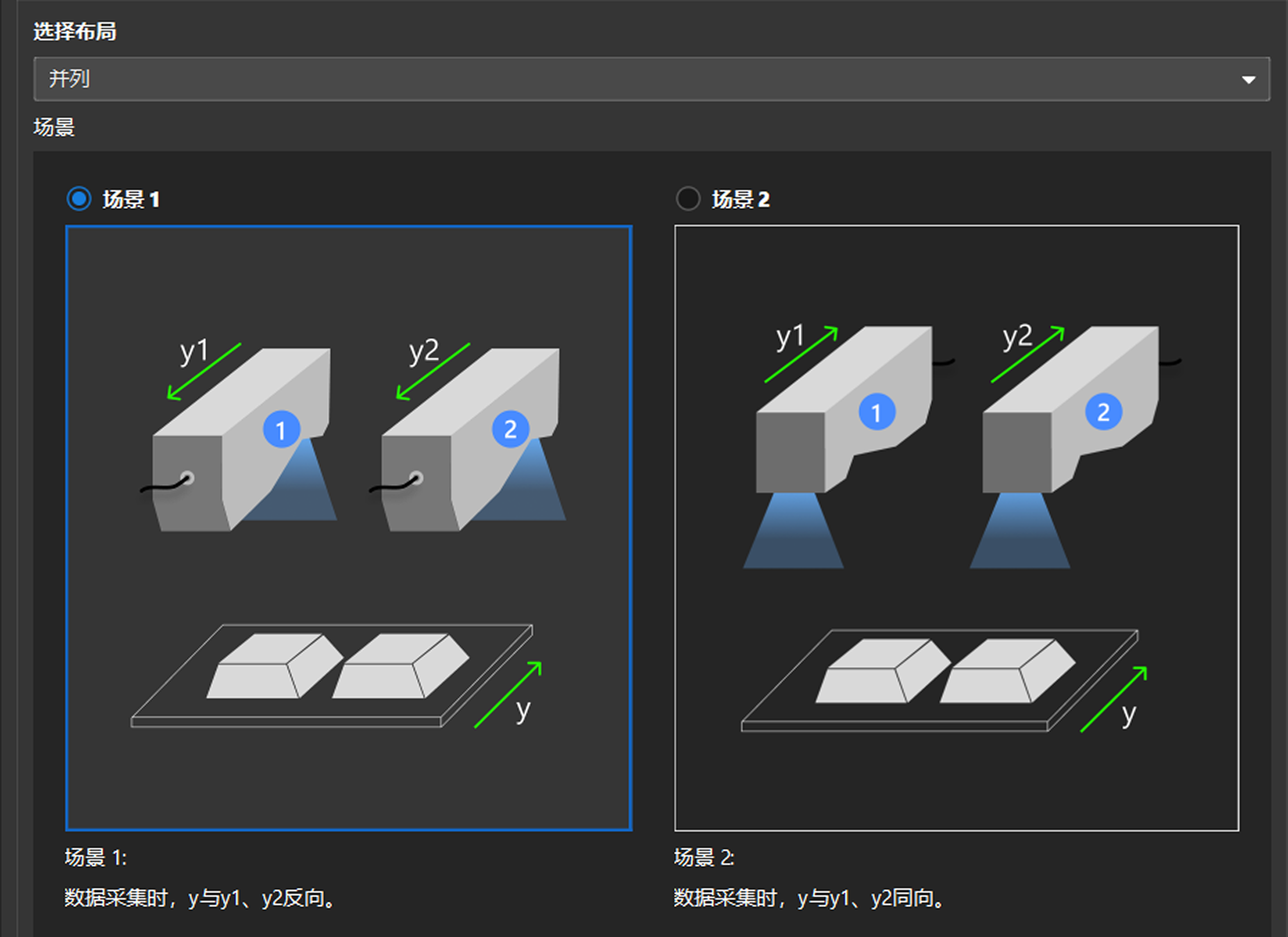
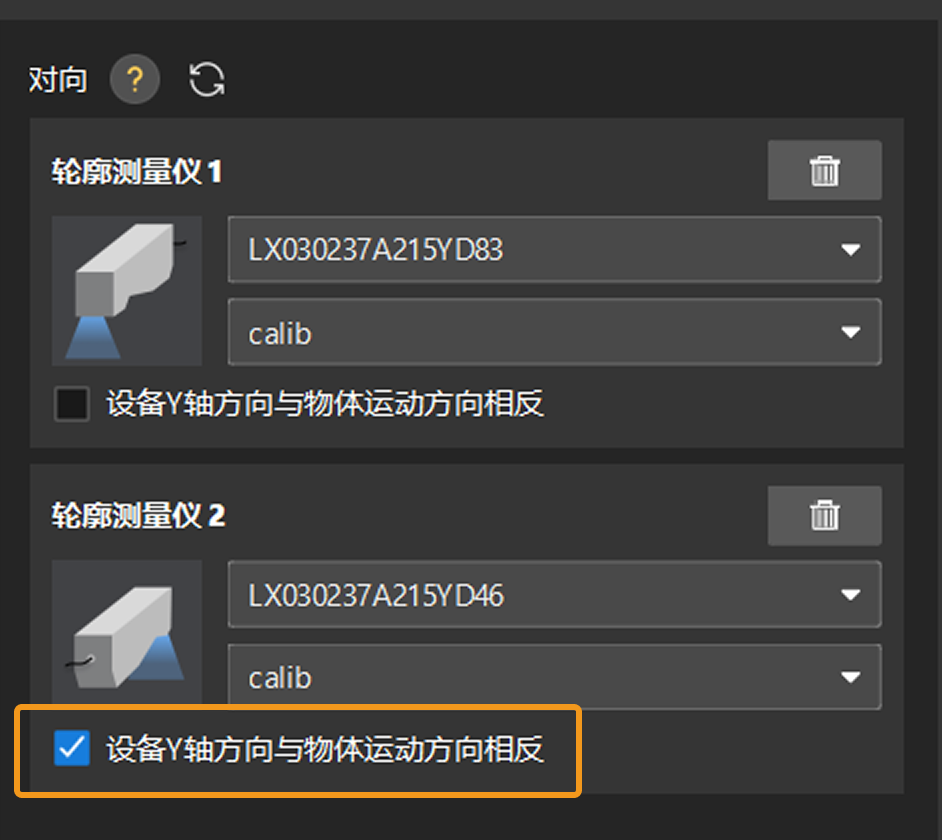
实际场景中,轮廓测量仪的Y轴方向与标定块的运动方向可以相同,也可以相反。但是,当轮廓测量仪的Y轴方向与标定块的运动方向相反时,采集的图像与实际相比会呈现出镜像效果。为了解决图像镜像问题,你可以根据布局进行合理设置:
-
当布局为并列、对射或环形时,选择正确的场景;
-
当布局为对向时,为其中一台设备勾选设备Y轴方向与物体运动方向相反选项。
轮廓测量仪Y轴方向与标定块运动方向的关系必须设置正确。 -
设置完成后,单击下一步按钮进入标定块设置页面。
 标定块设置
标定块设置
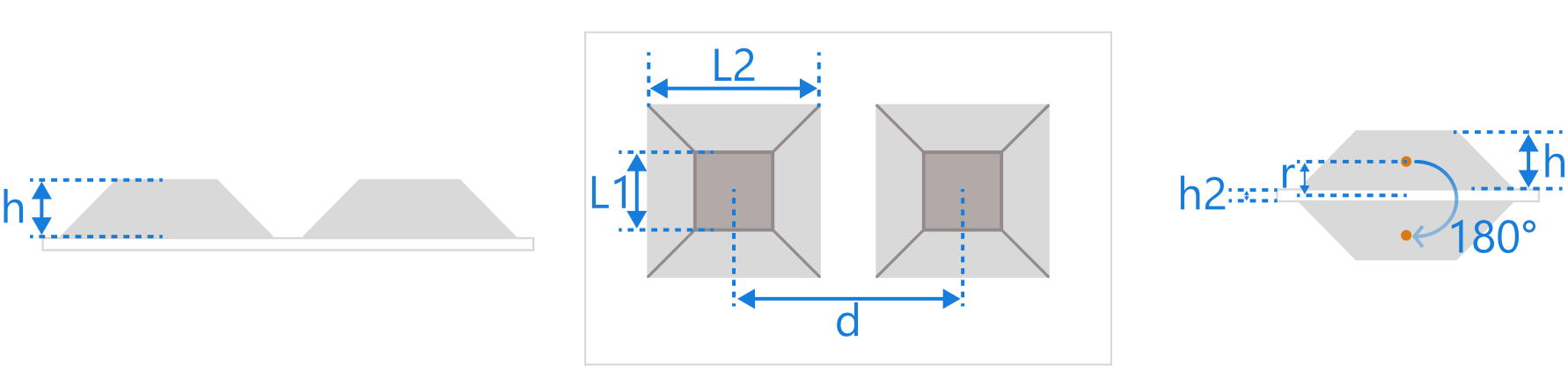
请根据实际使用的标定块填写参数值。不同布局下,参数显示有差异。
| 请务必填写准确的参数值。 |
| 参数 | 解释 | ||
|---|---|---|---|
上底面边长(L1) |
棱台较短底边的边长。 |
||
下底面边长(L2) |
棱台较长底边的边长。 |
||
棱台高度(h) |
棱台上表面到下表面的垂直距离。 |
||
平移距离(d) |
指相邻棱台中心线之间的距离。标定块上有多个棱台并列时,相邻棱台平移该距离后可相互重合。 仅在并列和对向布局下需要设置。
|
||
底座厚度(h2) |
标定块底座的厚度。 仅在对射布局下需要设置。 |
||
旋转半径(r) 旋转角度(α) |
标定块上有多个棱台,相邻棱台绕一点旋转后可相互重合。该点通常为底座内切圆的圆心。 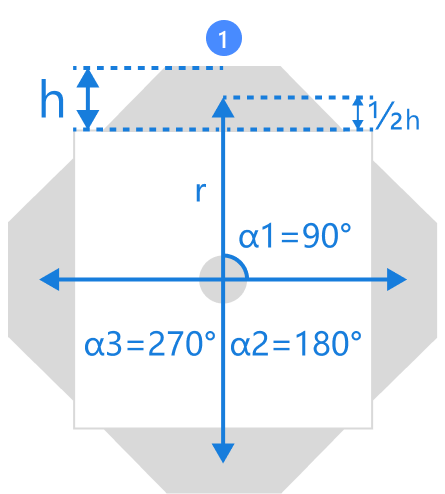
仅在对射和环形布局下可见。其中,对射布局下的旋转角度固定为180°,不可更改。 |
填写完参数值并确认无误后,单击下一步按钮进入标定页面。
 标定
标定
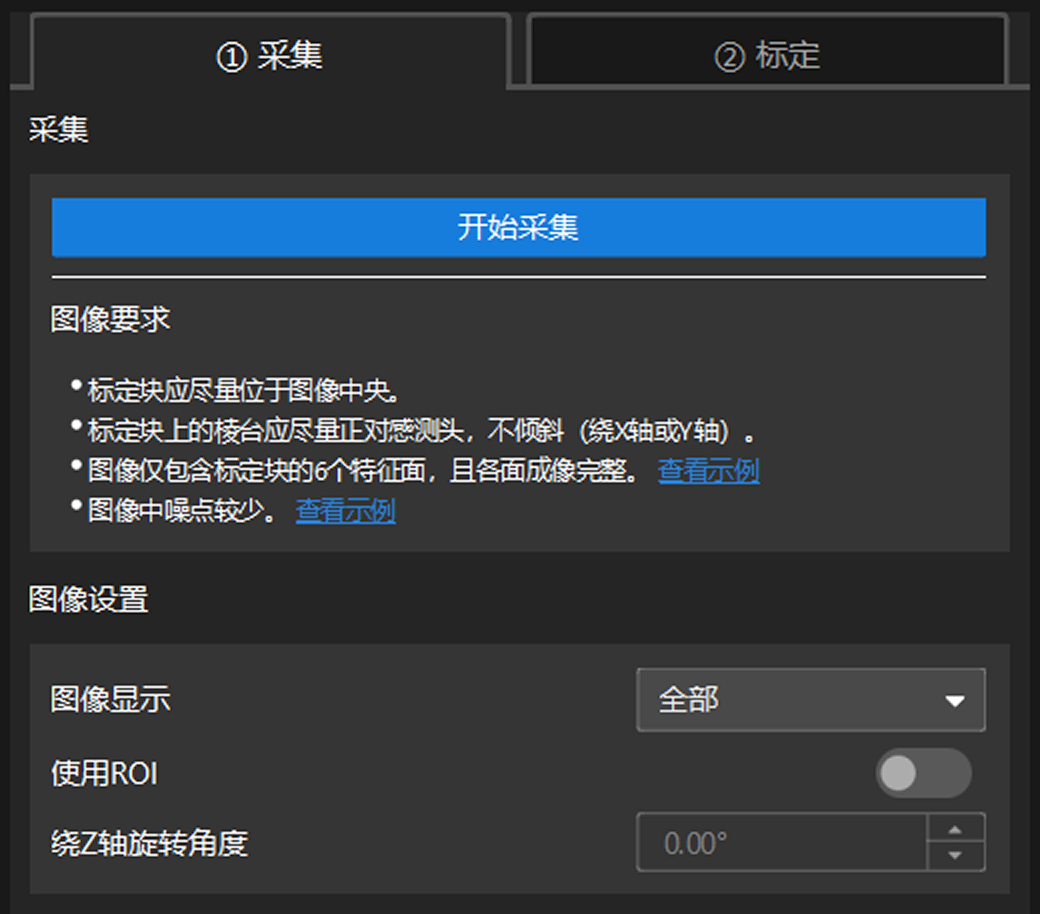
标定流程如下:
-
在采集选项卡下,单击开始采集按钮,获取图像数据。
-
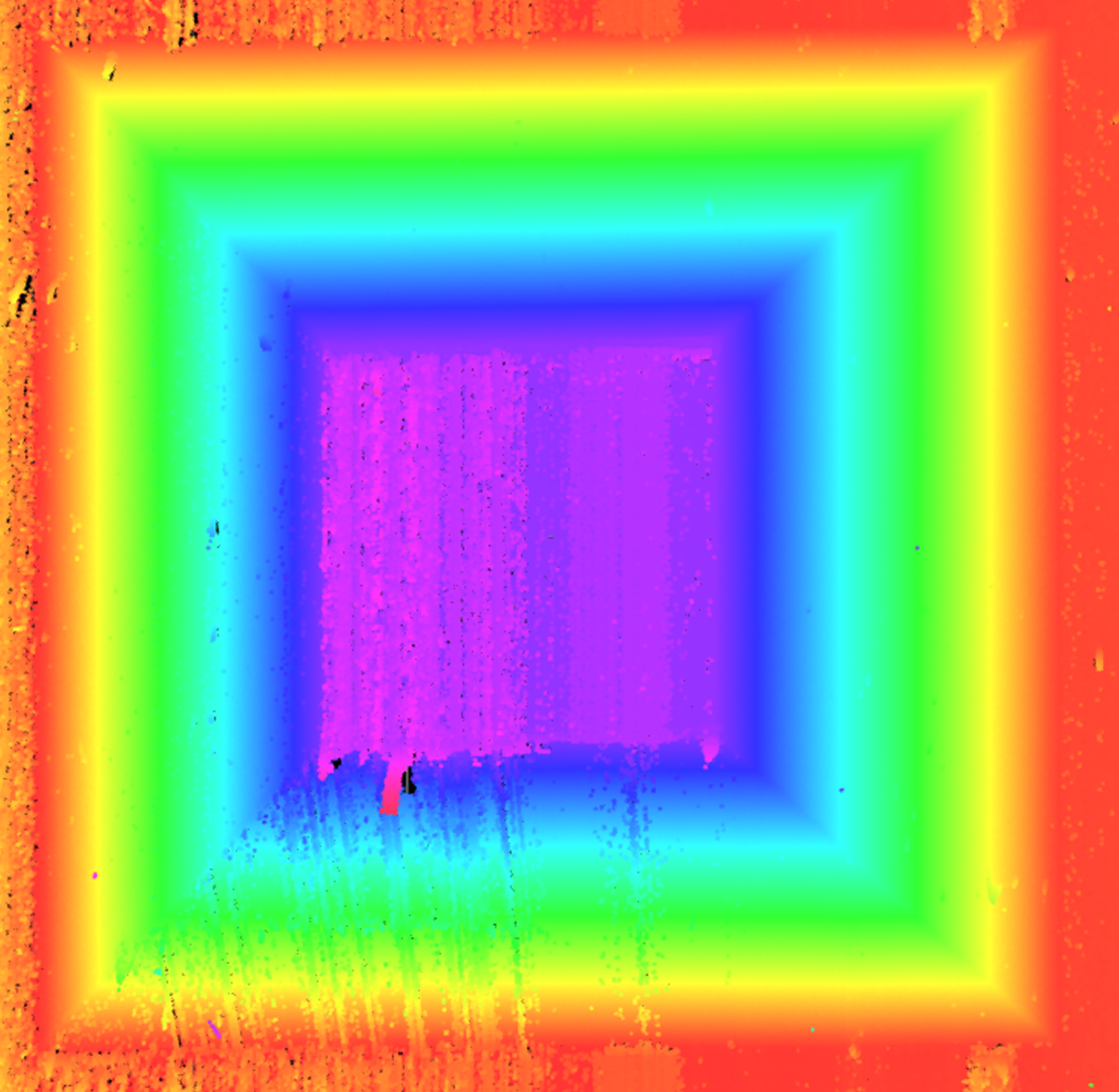
通过图像显示的下拉选项切换数据,确保各台轮廓测量仪采集的图像满足以下要求。
-
标定块位于图像正中央。
-
图像仅包含标定块的6个特征面,且各面成像完整。
若存在其他表面数据,请打开使用ROI开关,然后调整ROI的大小和位置,确保ROI内仅包含标定块的6个特征面。 -
标定块上的棱台应尽量正对感测头,且不绕X轴、Y轴或Z轴旋转。
-
图像中噪点较少。
正常 点缺失严重 部分表面不完整 存在多余表面 噪点过多 
-
-
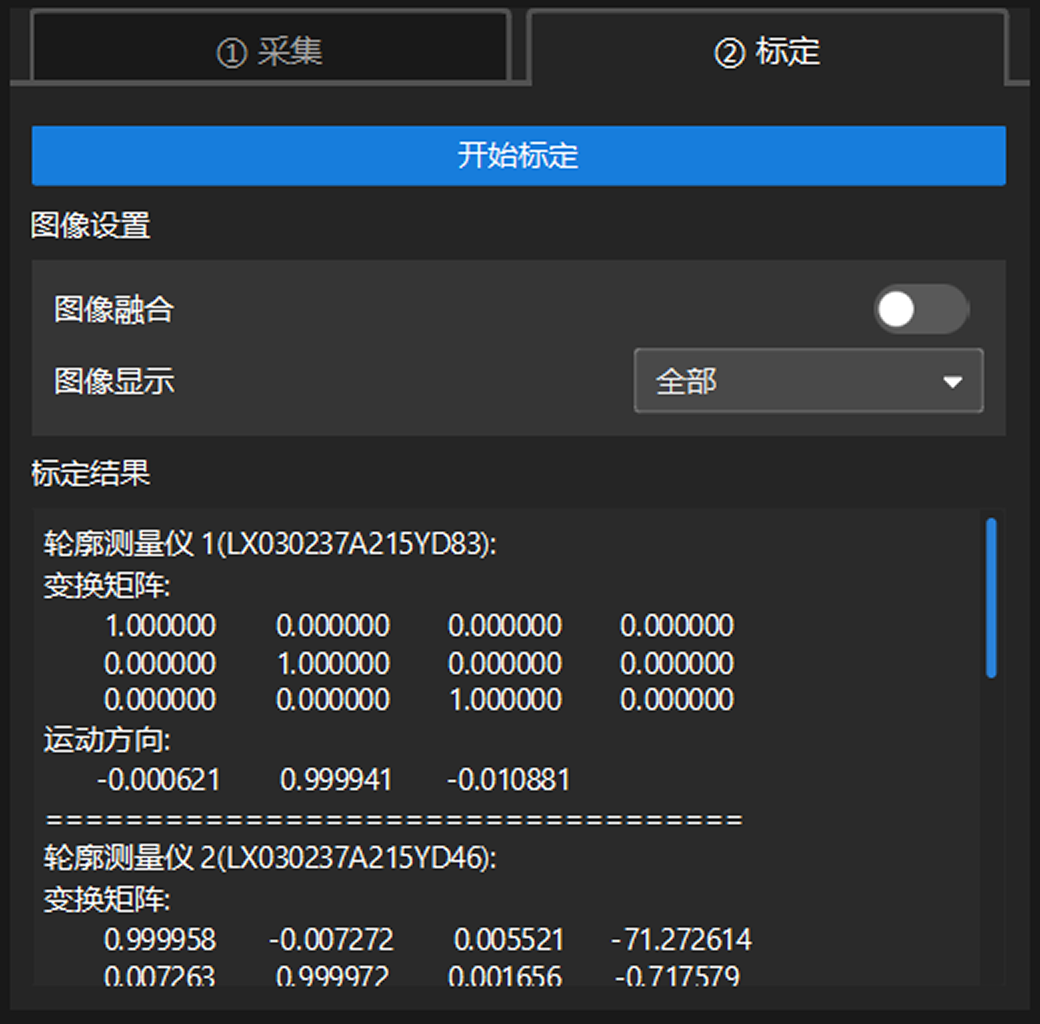
切换到标定选项卡,单击开始标定按钮,开始多轮廓测量仪标定。
-
查看标定结果,确保标定精度满足要求。
当轮廓测量仪的视野有重叠时,你可以打开图像融合开关,查看融合后图像效果是否符合预期。 -
单击保存按钮,在弹出的窗口中设置名称和路径后即可保存标定结果,完成标定。
附录:标定结果说明
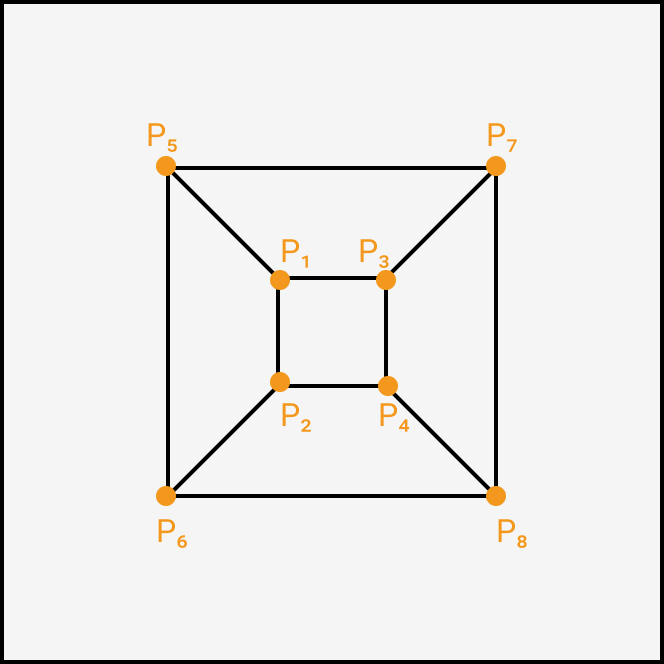
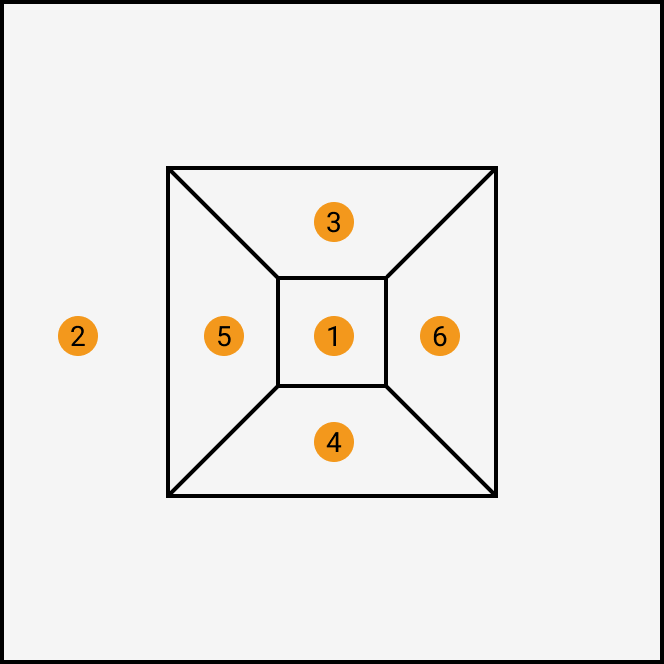
各台轮廓测量仪采集到的数据中,点和平面编号定义如下图所示(俯视图)。其中,P1 ~ P8 为棱台的8个角点,① ~ ⑥为每台轮廓测量仪采集的数据中应包含的6个平面。
|
|
点 |
平面 |
在进行图像拼接时,其他轮廓测量仪采集的数据均需变换至主轮廓测量仪(轮廓测量仪1)采集的数据所在坐标系下。
| 变换矩阵和误差(“重投影误差”除外)均相对于主轮廓测量仪计算。 |
变换矩阵 |
轮廓测量仪采集的数据在图像拼接时进行的平移、旋转变换。 |
运动方向 |
标定块相对轮廓测量仪的运动方向向量,基准值为(0, 1, 0),表示标定块正对感测头,且沿轮廓测量仪Y轴正方向运动,无任何旋转(绕X轴、Y轴和Z轴)。 |
重投影误差 |
计算棱台8个角点的测得坐标与基准坐标之间的偏差以计算重投影误差,单位为毫米(mm)。重投影误差值越小越好。 |
面面误差 |
坐标系变换后,各对应平面法向量之间的夹角与基准夹角之间的差值即为面面误差,单位为度(°)。 以2台并列的轮廓测量仪为例: 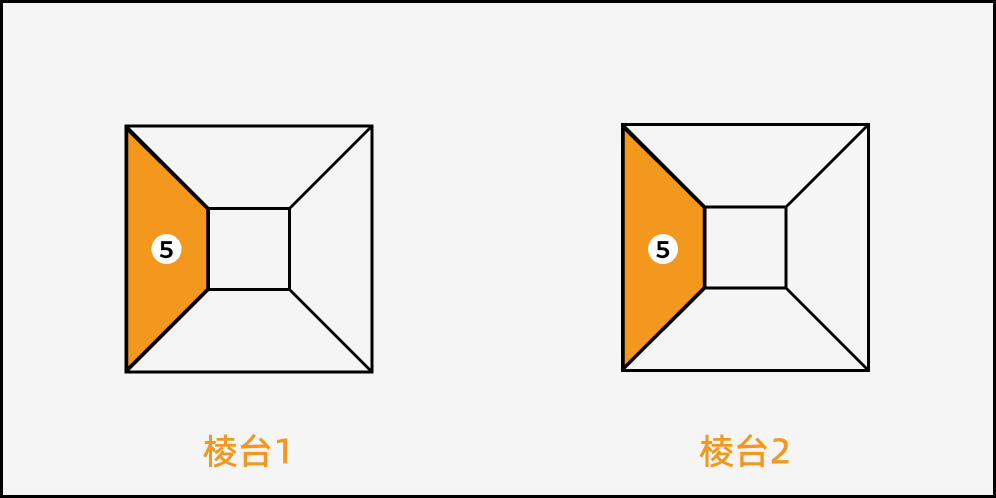
标定块上的棱台1和2分别由轮廓测量仪1和2扫描。每台设备采集的数据中应包含6个平面(编号①~⑥),根据标定块设计可获取对应平面(如上图中的平面⑤)的法向量夹角,作为基准值。经过坐标系变换后,可计算对应平面法向量之间的夹角,并将该夹角与基准值比较,得到面面误差。 |
点面误差 |
坐标系变换后,点到平面的垂直距离与基准距离之间的差值即为点面误差,单位为毫米(mm)。 以2台并列的轮廓测量仪为例: 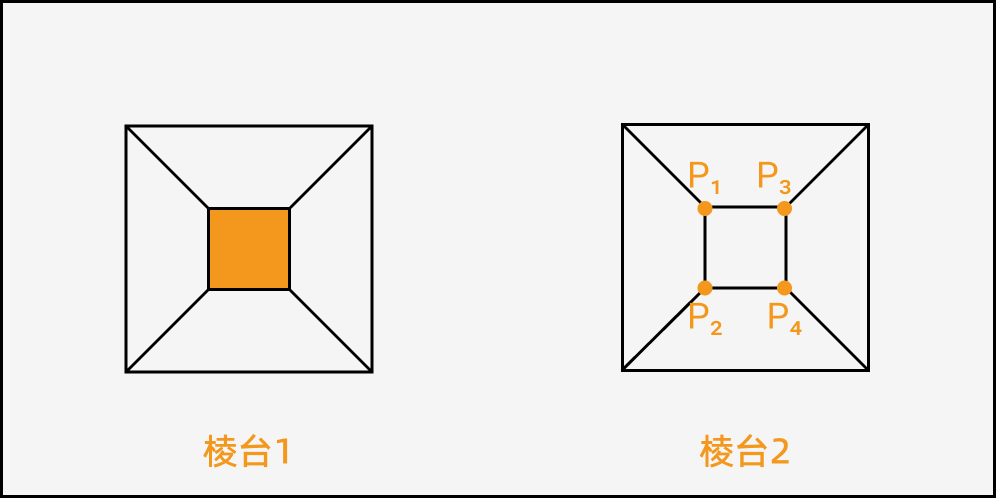
标定块上的棱台1和2分别由轮廓测量仪1和2扫描。根据标定块设计可获取点面误差的8个基准值,即棱台2上底面4个角点(P1 ~ P4)到棱台1上表面的距离和棱台2下底面4个角点(P5 ~ P8)到棱台1下底面的距离。经过坐标系变换后,可计算棱台2上8个角点到对应平面的垂直距离,并将该距离与基准值比较,得到点面误差。 |
点点误差 |
坐标系变换后,各对应点之间的距离与基准距离的差值即为点点误差,单位为毫米(mm)。 以2台并列的轮廓测量仪为例: 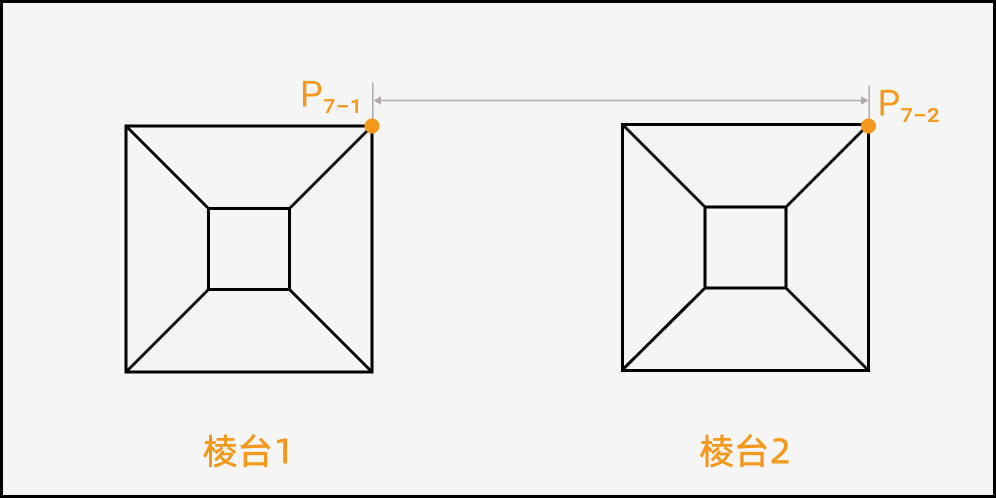
标定块上的棱台1和2分别由轮廓测量仪1和2扫描。两个棱台具有8对对应角点(上图中的P7-1和P7-2为一对),根据标定块设计可获取每对角点之间的基准距离。经过坐标系变换后,可计算实际数据中对应角点之间的距离,并将该距离与基准值比较,得到点点误差。 |