표면 가장자리에 선 피팅
기본 개념
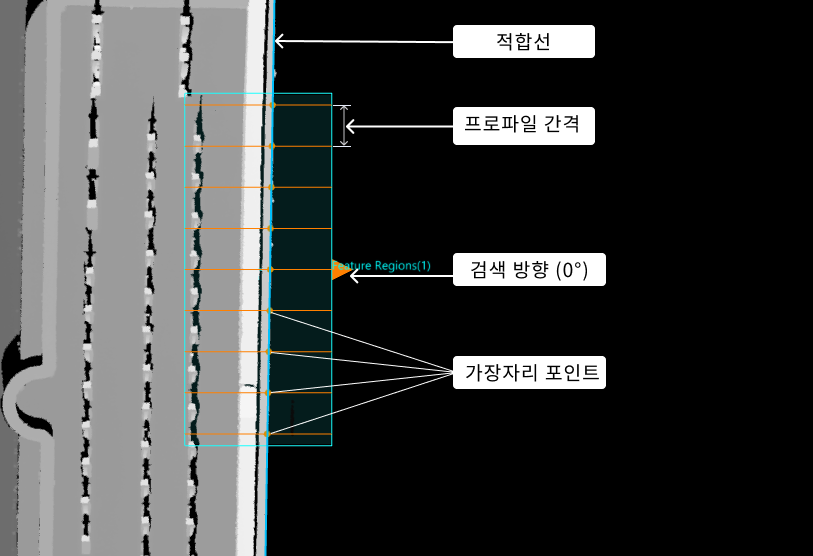
검색 방향, 프로파일, 가장자리 포인트
표면 데이터에서 특징 영역을 설정하여, 해당 영역에 감지하고자 하는 가장자리가 포함되도록 합니다. 가장자리의 데이터 포인트는 뎁스 또는 광도 값이 크게 변경됩니다. 이러한 큰 변화를 찾기 위해, 스텝을 사용하여 검색 방향을 따라 균일한 간격으로 프로파일을 추출할 수 있습니다. 각 프로파일은 가장자리의 포인트에서 발생하는 뎁스 및 광도 변화를 효과적으로 반영합니다. 검색 방향은 가능한 한 가장자리에 수직이어야 합니다. 그런 다음 추출된 프로파일에서 가장자리 포인트(edge points)를 감지하고 이 점을 사용하여 선을 피팅합니다.
|
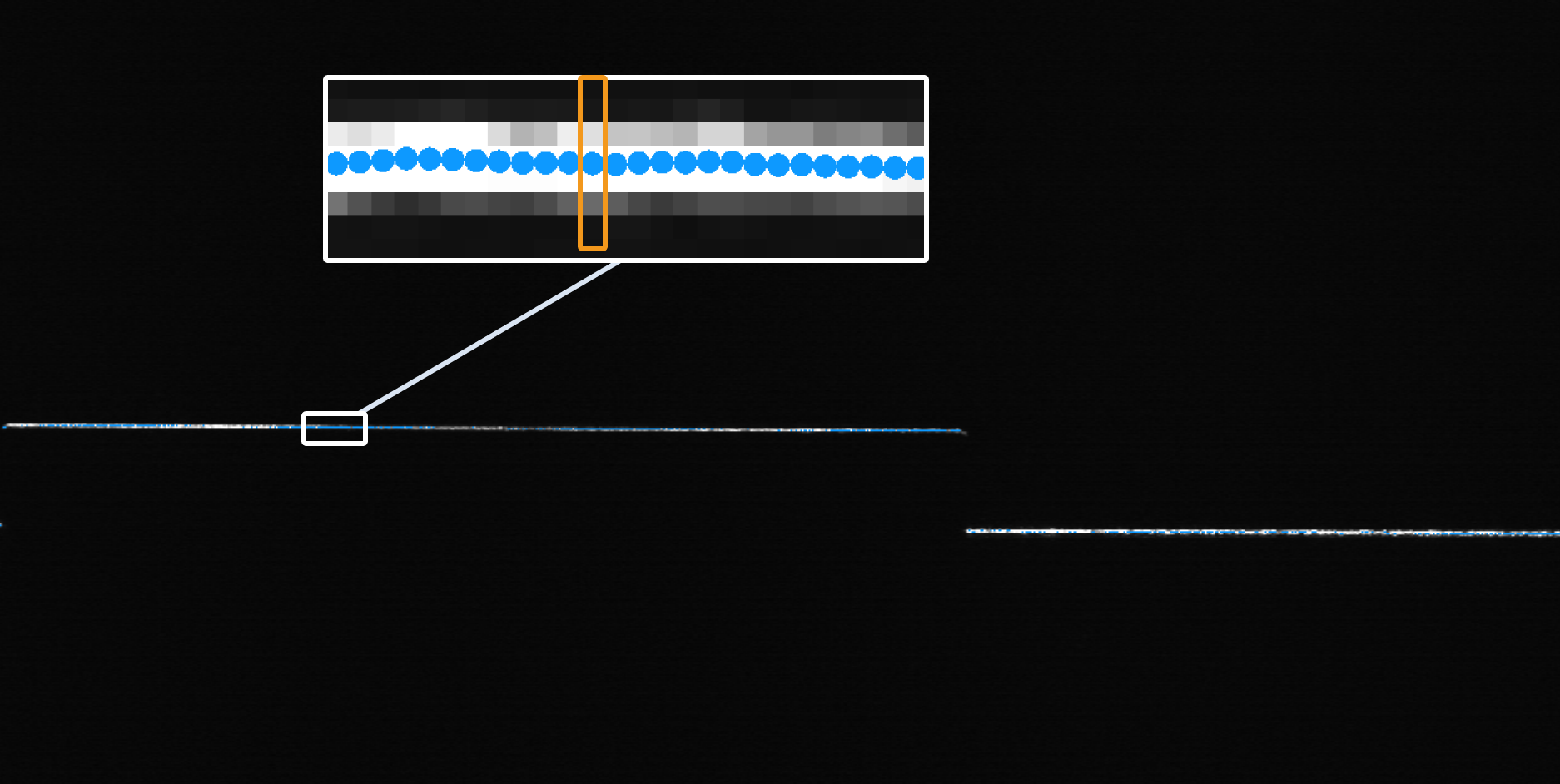
위 그림과 같이 검색 방향(0°, 양의 X축 방향)을 따라 균일한 간격의 프로파일을 추출하고 이 프로파일에서 가장자리 포인트를 검출합니다. |
요약하자면, 이 스텝을 사용하기 위해 이해해야 할 기본 개념은 다음과 같습니다.
-
검색 방향
특징 영역에서 프로파일이 추출되는 방향입니다. 검색 방향은 가장자리에 있는 포인트의 뎁스 또는 광도 값 변화를 더 정확히 반영하기 위해, 가능한 가장자리에 수직이 되도록 설정해야 합니다.
-
프로파일 및 가장자리 포인트
스텝은 각 프로파일의 요구 사항을 충족하는 가장자리 포인트를 감지하고 이러한 점에 선을 피팅합니다. 가장자리 포인트는 반드시 프로파일 상의 점일 필요는 없습니다. 대신, 뎁스와 광도 변화에 기반하여 계산된 경사도의 변화가 가장 큰 점이 가장자리 포인트로 간주됩니다.
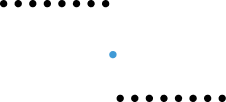
하나의 포로파일입니다. 파란색 점이 감지된 가장자리 포인트입니다.
사용방법
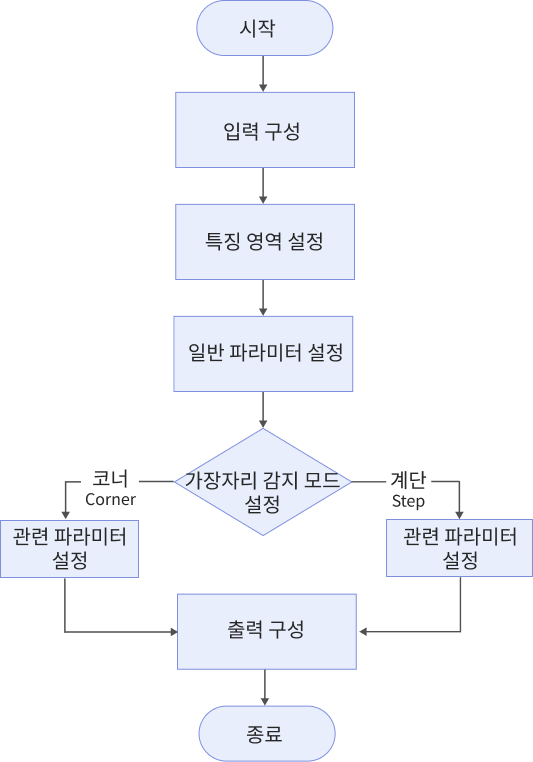
파라미터
일반 파라미터
| 파라미터 | 설명 | ||
|---|---|---|---|
광도 이미지 사용 |
대상 감지 영역이 평평하고 색상 차이가 두드러지는 경우, 광도 이미지를 사용하여 가장자리 감지를 수행할 수 있습니다. 이 옵션을 선택하면, 스텝은 원형 가장자리 감지 및 직선 피팅을 위해 광도 이미지를 사용하며, 선택하지 않으면 기본적으로 뎁스 맵을 사용합니다. |
||
특징 영역 |
가장자리 감지 및 선 피팅을 위해 1~4개의 특징 영역을 설정합니다. 특징 영역을 조정하는 방법은 특징 영역을 통해 확인 가능합니다. |
||
검색 방향 |
가장자리 포인트의 방향을 감지합니다. 이 스텝에서는 검색 방향을 따라 프로파일을 추출하여 가장자리 포인트를 감지합니다. 검색 방향은 양의 X축 방향을 기준으로, Z축을 중심으로 반시계 방향으로 회전한 각도로 정의됩니다. 값 리스트: 0°, 90°, 180°, 270°
|
||
고정 각도 |
실제 가장자리 각도를 알고 있는 경우 적합선의 각도를 고정하려면 이 옵션을 선택합니다. 이 옵션을 선택한 후에는 고정 각도 값을 설정해야 합니다.
|
||
고정 각도 값 |
양의 X축 방향을 기준으로 Z축을 중심으로 반시계 방향으로 회전하는 각도입니다. 각도는 -180°에서 180° 사이여야 합니다. 고정 각도 파라미터를 선택한 경우에만 표시됩니다. |
||
이상치 비율 |
직선 피팅 중에 제거할 이상치의 비율입니다. |
||
가장자리 감지 모드 |
가장자리에 있는 데이터 포인트의 뎁스 또는 광도 변경 모드입니다.
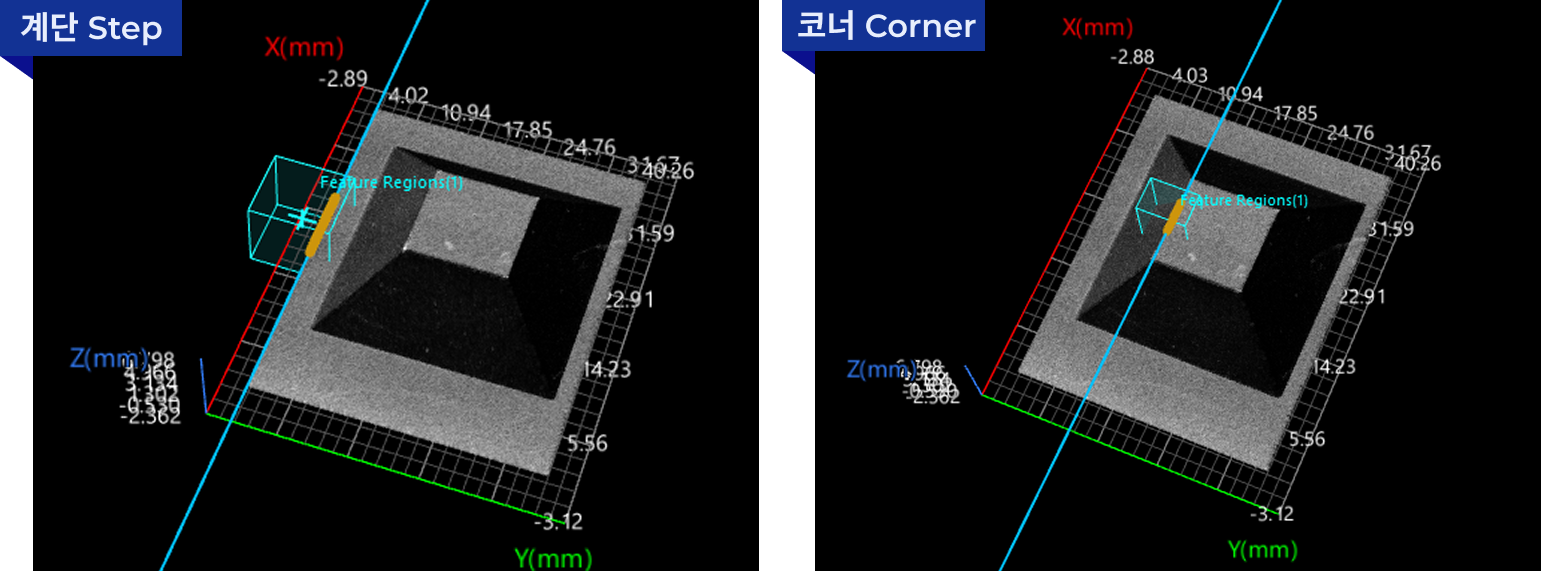
위 그림과 같이, 계단형 가장자리는 양쪽 데이터 간의 차이가 뚜렷하게 나타나며, 단면에서는 가장자리 부근이 급격히 ‘떨어지는’ 형태로 표현됩니다. |
||
적합선 방향 |
드롭다운 리스트에서 적절한 옵션을 선택하여 적합선의 방향 벡터를 결정함으로써 적합선의 방향을 결정합니다.
|
||
프로파일 간격 |
특징 영역에서 인접한 프로파일 사이의 거리입니다. 설정된 간격이 픽셀 너비보다 작으면, 스텝은 픽셀 너비를 프로파일 간격으로 사용합니다.
|
||
프로파일 평균 너비 |
검색 방향에 수직인 방향을 따라 데이터 포인트 평균의 창 크기를 계산하여, 더 평활한 프로파일을 얻고 노이즈의 영향을 줄일 수 있습니다. 0으로 설정하면 프로파일에 대한 평균화 작업이 진행되지 않습니다.
|
||
세부정보 표시 |
이 옵션을 선택하면 시각화 창에 검색 방향을 표시할 수 있습니다. |
계단 모드 가장자리 파라미터
가장자리 감지 모드를 계단으로 선택한 경우, 아래 파라미터를 설정해야 합니다.
| 파라미터 | 설명 | ||
|---|---|---|---|
프로파일 평활화를 위한 창 크기 |
검색 방향(프로파일 방향)을 따라 프로파일을 평균화하기 위한 창 크기입니다. 평균화 후에는 프로파일이 더 매끄러워집니다. 0으로 설정하면 검색 방향을 따라 프로파일에 대한 평균화 작업이 진행되지 않습니다. 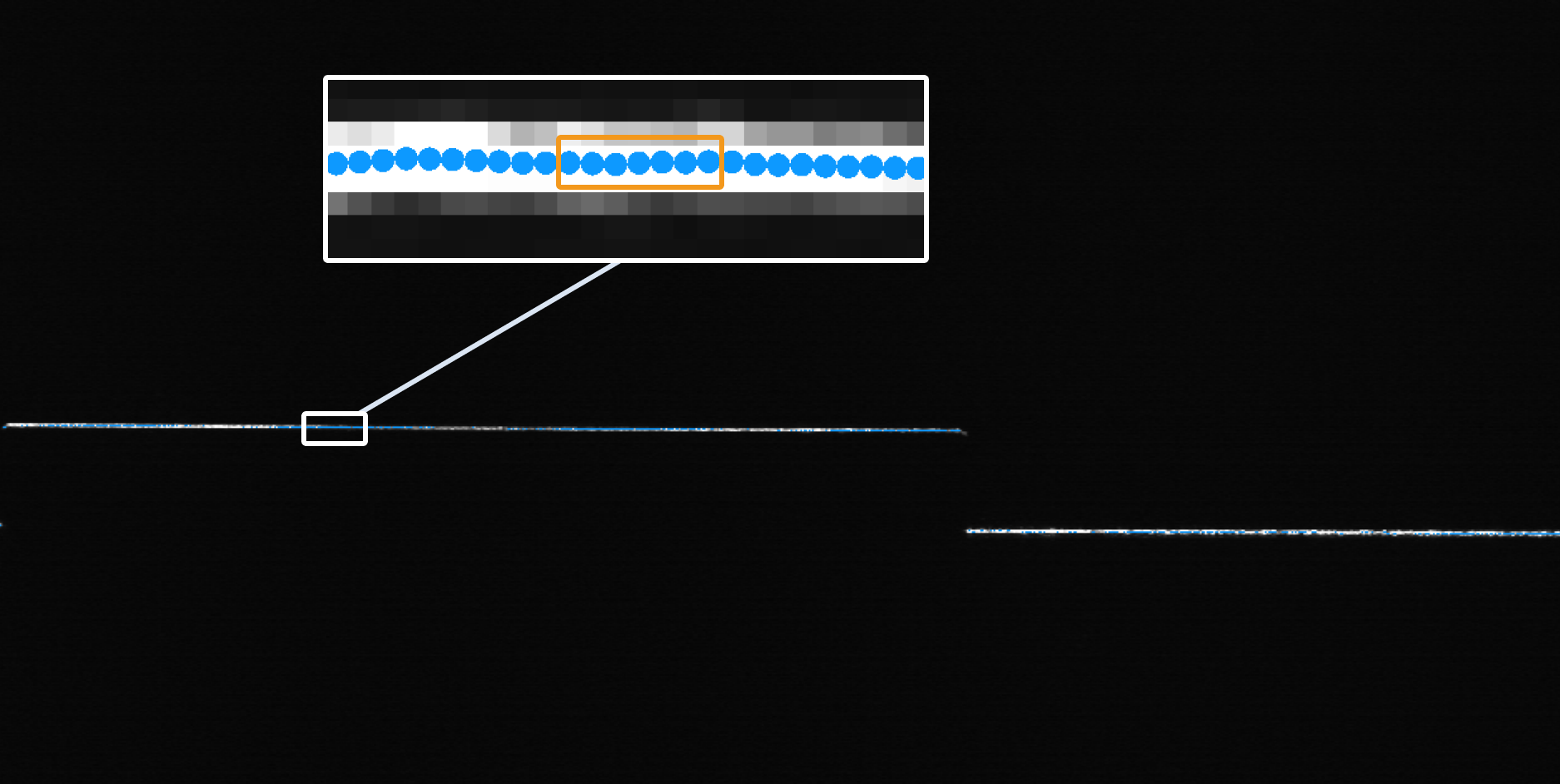
|
||
갭 채우기 임계값 |
프로파일의 데이터 포인트가 가려져 갭이 생길 수 있습니다. 프로파일의 갭 크기가 설정된 임계값 이하일 경우, 갭 아래쪽의 가장 가까운 유효 포인트를 사용하여 갭을 채웁니다. 반면, 갭 크기가 설정된 임계값을 초과하면 해당 갭을 null 포인트로 처리합니다. 
|
||
Null 포인트 포함 |
이 파라미터는 가장자리 감지 프로세스에서 Null 포인트를 포함할지 여부를 결정합니다. (Null 포인트는 뎁스 또는 광도 정보가 없는 포인트로, 이는 종종 데이터 손실이나 특징 영역의 부적절한 설정으로 인해 발생합니다.) 이 옵션을 선택하면 Null 채우기 뎁스 값을 설정해야 합니다.
|
||
Null 채우기 뎁스 값 |
Null 포인트를 채우기 위한 뎁스 값입니다. Null 포인트 포함 옵션을 선택한 경우에만 설정합니다. |
||
Null 채우기 광도 값 |
Null 포인트를 채우기 위한 광도 값입니다. 광도 이미지 사용 옵션과 Null 포인트 포함 옵션을 동시에 선택한 경우에만 설정합니다. |
||
계단 너비 |
프로파일의 계단 너비입니다. 프로파일의 계단이 경사면인 경우, 이 파라미터를 설정하면 계단 높이를 정확하게 측정하고 가장자리 위치를 찾는 데 도움이 될 수 있습니다.
|
||
계단 방향 |
검색 방향에 따른 계단 방향입니다. 값 리스트: Rising, Falling, Rising or falling |
||
계단 유형 |
각 프로파일에서 선택할 계단 유형을 설정합니다. 값 리스트: Best, First, Last |
||
절대 임계값 |
프로파일에서 잠재적인 계단을 감지하기 위한 최소 높이 변화입니다. 절대 임계값을 초과하는 계단은 가장자리 포인트를 생성할 수 있습니다. 광도 이미지 사용 파라미터를 선택한 경우, 절대 임계값은 프로파일의 잠재적 계단(step)에 대한 최소 광도 변화를 의미합니다. |
||
상대 임계값 사용 |
이 파라미터는 계단의 높이(또는 광도) 변화가 프로파일에서의 최대 변화의 설정된 백분율보다 크거나 같을 경우, 해당 계단을 유효한 것으로 인정합니다. 이 파라미터를 선택한 후, 상대 임계값을 설정해야 합니다.
|
||
상대 임계값 |
상대 임계값 사용을 선택한 경우에만 표시됩니다. |
출력
출력 항목을 선택하고 스텝에 출력 포트를 추가하면, 스텝 실행 후 해당 데이터가 출력됩니다. 실제 측정 수요에 따라 해당 출력 항목을 선택할 수 있습니다.
|
확장 가능한 출력 항목을 선택한 경우, ▶ 아이콘을 클릭하여 확장한 후 최소값과 최대값을 설정하여 허용 범위를 결정합니다. 출력 값이 허용 범위 내에 있을 경우, 측정 항목은 합격(OK)으로 판정되며, 반대로 유효 범위를 벗어난 경우에는 불합격(NG)으로 판정됩니다. |
| 출력 항목 | 설명 |
|---|---|
중간점 X |
적합선 중간점의 X 값입니다. |
중간점 Y |
적합선 중간점의 Y 값입니다. |
중간점 Z |
적합선 중간점의 Z 값입니다. |
회전 각도 |
적합선의 회전 각도, 즉 양의 X축 방향을 기준으로 Z축을 중심으로 시계 반대 방향으로 회전하는 각도입니다. 고정 각도 값 을 설정한 경우, 회전 각도는 고정 각도 값과 맞춤선 방향 모두에 의해 결정됩니다. |
평균 계단 크기 |
모든 프로파일의 평균 계단 높이 또는 광도입니다. |
가장자리 포인트 수 |
선 피팅에 사용되는 가장자리 포인트의 수입니다. |
최소 오차 |
적합선 아래에서 가장 먼 가장자리 포인트의 오차 값으로, 음수입니다. |
최대 오차 |
적합선 아래에서 가장 먼 가장자리 포인트의 오차 값으로, 양수입니다. |
피팅된 가장자리 선 |
감지된 가장자리 포인트에 따른 피팅된 선입니다. |
중심점 |
특징영역 1의 중심점을 지나 검색 방향을 나타내는 선과 피팅 선의 교점입니다. |
가장자리 평면 |
피팅 선을 통과하고 Z축과 평행한 평면입니다. |
오류 분석
|
CV-W3301
오류: '프로파일 간격' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작거나 이미지의 가장 긴 변의 길이보다 큽니다.
해결 방법: 파라미터 값이 0보다 크거나 같고, 이미지에서 가장 긴 변의 길이보다 작은지 확인합니다.
CV-W3302
오류: '프로파일 평활화를 위한 창 크기' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인:
-
파라미터 값이 0보다 작거나 이미지의 가장 긴 변의 길이보다 큽니다.
-
파라미터 값이 특징 영역의 유효한 범위 내에 있지 않습니다.
해결 방법:
-
파라미터 값이 0보다 크거나 같고, 이미지에서 가장 긴 변의 길이보다 작은지 확인합니다.
-
파라미터 값을 낮추거나 특징 영역을 확장하여 값이 유효한 범위 내에 포함되도록 조정합니다.
CV-W3303
오류: '계단 너비' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인:
-
파라미터 값이 0보다 작거나 이미지의 가장 긴 변의 길이보다 큽니다.
-
파라미터 값이 특징 영역의 유효한 범위 내에 있지 않습니다.
해결 방법:
-
파라미터 값이 0보다 크거나 같고, 이미지에서 가장 긴 변의 길이보다 작은지 확인합니다.
-
파라미터 값을 낮추거나 특징 영역을 확장하여 값이 유효한 범위 내에 포함되도록 조정합니다.
CV-W3304
오류: '갭 채우기 임계값' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작거나 이미지의 가장 긴 변의 길이보다 큽니다.
해결 방법: 파라미터 값이 0보다 크거나 같고, 이미지에서 가장 긴 변의 길이보다 작은지 확인합니다.
CV-W3305
오류: '이상치 비율' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작거나 100%보다 큽니다.
해결 방법: 파라미터 값을 0~100% 사이로 설정합니다.
CV-W3306
오류: 가장자리 포인트가 감지되지 않습니다.
가능한 원인:
-
특징 영역이 올바르게 설정되어 있지 않습니다.
-
'절대 임계값’과 '상대 임계값’이 너무 큽니다.
-
'검색 방향’이 올바르게 설정되어 있지 않습니다.
해결 방법:
-
가장자리 포인트가 감지될 수 있도록 특징 영역을 조정합니다.
-
'절대 임계값’과 '상대 임계값' 값을 낮춥니다.
-
검색 방향은 가능한 감지할 가장자리에 수직이어야 합니다.
CV-W3307
오류: Epsilon 파라미터의 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작습니다.
해결 방법: 파라미터 값을 0 이상으로 조정합니다.
CV-W3308
오류: '프로파일 평균 너비' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인:
-
파라미터 값이 0보다 작거나 이미지의 가장 긴 변의 길이보다 큽니다.
-
파라미터 값이 특징 영역의 유효한 범위 내에 있지 않습니다.
해결 방법:
-
파라미터 값이 0보다 크거나 같고, 이미지에서 가장 긴 변의 길이보다 작은지 확인합니다.
-
파라미터 값을 낮추거나 특징 영역을 확장하여 값이 유효한 범위 내에 포함되도록 조정합니다.
CV-W3309
오류: 특징 영역 설정이 잘못되었습니다.
가능한 원인:
-
특징 영역의 길이 또는 너비가 0보다 작거나 같습니다.
-
특징 영역의 길이 또는 너비가 이미지에서 가장 긴 변의 길이의 두 배 이상입니다.
해결 방법:
-
특징 영역의 길이와 너비를 0보다 크게 조정합니다.
-
특징 영역의 길이와 너비가 이미지에서 가장 긴 변의 길이의 두 배 미만이 되도록 조정합니다.
CV-W3310
오류: 'Null 채우기 광도 값' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작거나 255보다 큽니다.
해결 방법: 파라미터 값이 0과 255 사이에 있도록 설정합니다.
CV-W3311
오류: 'Null 채우기 뎁스 값' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 −10000보다 작거나 10000보다 큽니다.
해결 방법: 파라미터 값을 -10000~10000 사이로 설정합니다.
CV-W3313
오류: '상대 임계값' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작거나 1보다 큽니다.
해결 방법: 파라미터 값이 0과 1 사이에 있도록 설정합니다.
CV-W3314
오류: '절대 임계값' 파라미터 값이 유효 범위 내에 있지 않습니다.
가능한 원인: 파라미터 값이 0보다 작거나 255보다 큽니다.
해결 방법: '광도 이미지 사용' 옵션을 선택한 경우, 절대 임계값을 0~255 내에 있도록 조정합니다.