Modbus TCP
Mech-MSR은 Modbus TCP 프로토콜을 사용하여 외부 장치와 통신할 수 있습니다. 다음 내용을 읽기 전에 Mech-MSR에서 통신 설정이 완료되었는지 확인하세요.
Modbus TCP에 대하여
Mech-MSR은 Modbus TCP 프로토콜을 사용하여 PLC와 통신할 수 있습니다. 이 통신 모드에서는 Mech-MSR이 서버(slave) 역할을, PLC가 클라이언트(master) 역할을 합니다. 모든 통신 요청은 PLC에서 시작되며, Mech-MSR은 이에 응답합니다.
Mech-MSR에서 Modbus TCP 통신이 활성화되면, 소프트웨어는 포트 502(기본 수신 포트)에서 하나 이상의 Modbus 클라이언트 요청을 수신하기 시작합니다.
입력 및 출력 신호
|
Mech-MSR은 홀딩 레지스터(Holding Register)에 접근하기 위해 아래에 명시된 표준 Modbus 기능 코드를 지원합니다.
|
|
홀딩 레지스터 주소는 실제 Modbus TCP 통신에서 기본 주소는 1이며, 이는 주소가 |
| 입력(PLC에서 Mech-MSR로) | 출력(Mech-MSR에서 PLC로) | ||||||
|---|---|---|---|---|---|---|---|
모듈 |
명칭 |
점유된 byte |
홀딩 레지스터 주소(4x) |
모듈 |
명칭 |
점유된 byte |
홀딩 레지스터 주소(4x) |
Command enable |
1 byte |
40001 |
Heartbeat |
1 byte |
40033 |
||
Command trigger |
Trigger acknowledge |
||||||
Data read finished |
Data ready |
||||||
Reset |
Execution completed |
||||||
Reserved field |
Reserved field |
||||||
Reserved field |
Reserved field |
||||||
Reserved field |
Reserved field |
||||||
Reserved field |
Error |
||||||
Reserved field |
3 bytes |
40002 |
종합 판정 결과 |
1 byte |
40034 |
||
Reserved field |
|||||||
Reserved field |
|||||||
Reserved field |
|||||||
Reserved field |
|||||||
Reserved field |
|||||||
Reserved field |
|||||||
Reserved field |
|||||||
Reserved field |
2 bytes |
40035 |
|||||
Command code |
2 bytes |
40005 |
상태 코드 |
2 bytes |
40037 |
||
Command parameter 1 |
2 bytes |
40007 |
RESERVED |
Reserved field |
2 bytes |
40039 |
|
Command parameter 2 |
2 bytes |
40009 |
ID 1의 판정 결과 ID 2의 판정 결과 ID 3의 판정 결과 ... |
8 bytes |
40041 |
||
Command parameter 3 |
2 bytes |
40011 |
|||||
Command parameter 4 |
2 bytes |
40013 |
|||||
ID 1의 측정 결과 ID 2의 측정 결과 ID 3의 측정 결과 ... |
256 bytes (4 bytes × 64) |
40049 |
|||||
입력(PLC에서 Mech-MSR로)
CONTROL_INPUT (입력 제어)
| 주소 | 데이터 | 설명 |
|---|---|---|
0.0 |
Command enable (bool) |
명령 활성화 신호가 1로 설정된 경우에만 다른 입력 신호가 유효하게 적용됩니다. |
0.1 |
Command trigger (bool) |
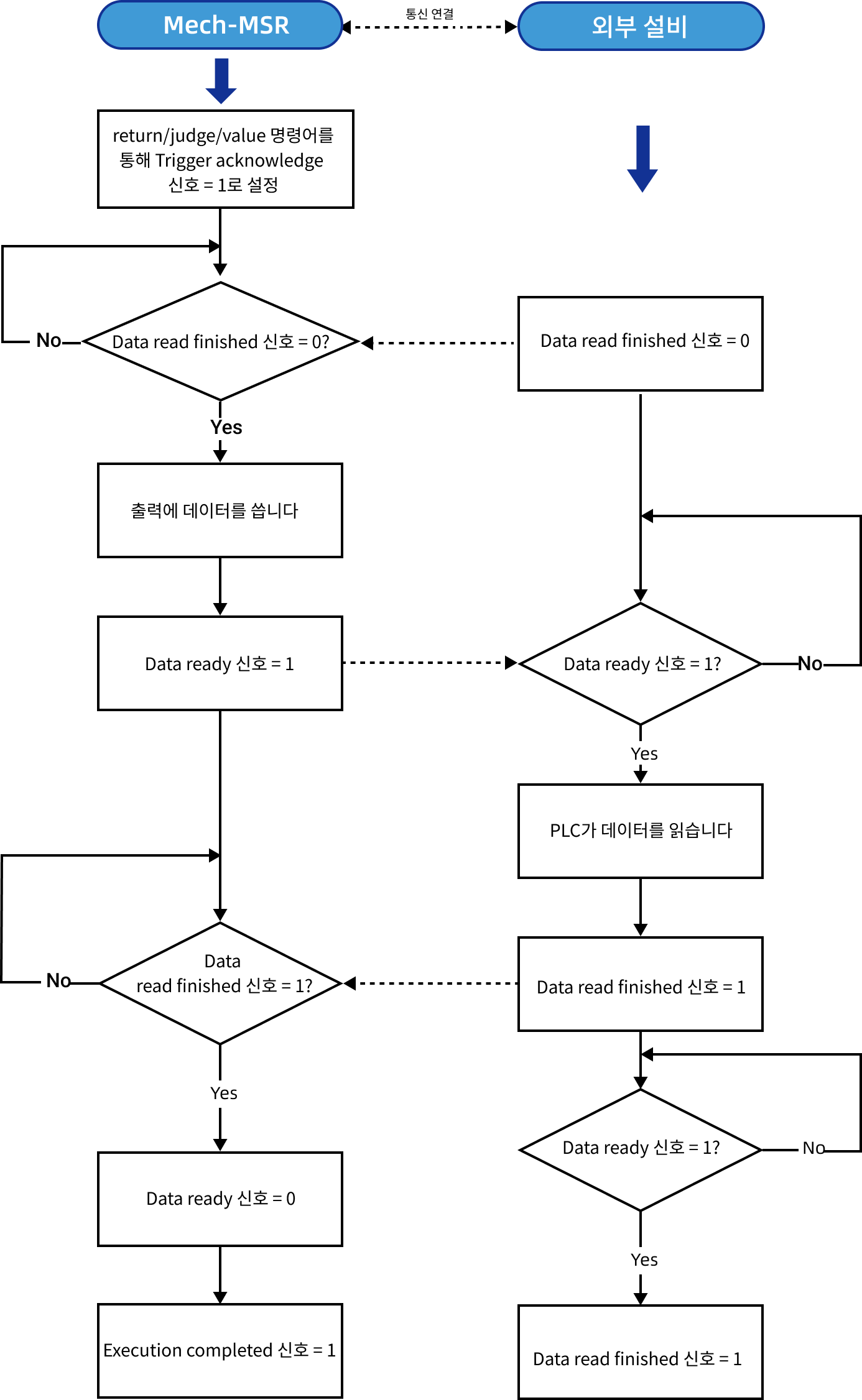
명령어 트리거 신호가 0에서 1로 변경(상승 에지 감지)되면, Mech-MSR이 명령 코드와 명령 파라미터를 읽습니다. Mech-MSR이 command trigger acknowledge 신호를 반환하면, 명령어 트리거 신호를 0으로 설정할 수 있습니다. |
0.2 |
Data read finished (bool) |
PLC가 데이터 읽기를 완료하면 이 신호는 1로 설정됩니다. PLC에 데이터 레디 신호가 0으로 변경되었음을 알리면, 이 신호를 0으로 설정할 수 있습니다. |
0.3 |
Reset (bool) |
이 신호를 1로 설정하면 PLC는 수신된 판정 결과와 측정 결과를 삭제합니다. 이 시점에서 PLC는 새로운 명령을 보낼 수 있으며 상태 코드 신호는 재설정됩니다. |
0.4 |
Reserved field (bool) |
보류된 필드입니다. |
0.5 |
Reserved field (bool) |
보류된 필드입니다. |
0.6 |
Reserved field (bool) |
보류된 필드입니다. |
0.7 |
Reserved field (bool) |
보류된 필드입니다. |
1.0~3.7 |
Reserved field (byte) |
보류된 필드입니다. |
COMMAND & COMMAND_PARAM (명령 코드 및 명령 파라미터)
다음 표에서는 Modbus TCP 통신에서 지원하는 명령, 명령 코드(COMMAND), 명령 파라미터(COMMAND_PARAM)에 대해 설명합니다.
| 명령어 | COMMAND | COMMAND_PARAM | 설명 |
|---|---|---|---|
execute |
1 |
프로젝트 번호입니다. 매번 하나의 프로젝트 번호만 설정할 수 있습니다. |
프로젝트를 트리거하여 프로젝트의 판정 결과와 측정 결과를 얻는 데 사용됩니다. |
trigger |
2 |
프로젝트 번호입니다. 한 번에 1~4개의 프로젝트 번호를 설정할 수 있습니다. |
프로젝트 실행을 트리거하는 데 사용됩니다. |
return |
3 |
프로젝트 번호입니다. 매번 하나의 프로젝트 번호만 설정할 수 있습니다. |
특정 프로젝트의 판정 결과 및 측정 결과를 얻기 위해 사용됩니다. |
judge |
4 |
특정 프로젝트의 전반적인 품질 판정 결과 또는 개별 측정 항목의 판정 결과를 얻는데 사용됩니다. |
|
value |
5 |
특정 프로젝트의 측정값을 얻는 데 사용됩니다. |
| 프로젝트 번호를 확인하는 방법은 프로젝트 리스트 내용을 참조하십시오. |
출력(Mech-MSR에서 PLC로)
CONTROL_OUTPUT (출력 제어)
| 주소 | 데이터 | 설명 |
|---|---|---|
0.0 |
Heartbeat (bool) |
시스템의 하트비트는 1초마다 바뀝니다. PLC와 Mech-MSR이 연결되어 있는지, 또는 연결이 끊어졌는지 확인하는 데 사용됩니다. |
0.1 |
Trigger acknowledge (bool) |
Mech-MSR이 command trigger 신호에 대한 상승 에지를 수신하면 이 신호가 1로 설정됩니다. command trigger 신호에 대해 실패 에지가 감지되면 이 신호가 0으로 설정됩니다. |
0.2 |
Data ready (bool) |
Mech-MSR은 출력 포트에 데이터를 쓰고 PLC가 출력 데이터를 읽을 때까지 기다립니다. Data read finished 신호가 1로 설정되면, 이 신호는 0으로 설정됩니다. |
0.3 |
Execution completed (bool) |
명령 실행이 완료되면 이 신호는 1로 설정되며 이는 명령 실행이 완료되었음을 나타냅니다. |
0.4 |
Reserved field (bool) |
보류된 필드입니다. |
0.5 |
Reserved field (bool) |
보류된 필드입니다. |
0.6 |
Reserved field (bool) |
보류된 필드입니다. |
0.7 |
Error (bool) |
Mech-MSR이 반환한 상태 코드가 0이 아닌 경우, 오류가 발생한 것이며 이 신호는 1로 설정됩니다. |
1.0 |
종합 판정 결과(bool) |
프로젝트의 종합 판정 결과로, 0은 합격(OK)을 의미하고 1은 불합격(NG)을 의미합니다. |
1.1~1.7 |
Reserved field (bool) |
보류된 필드입니다. |
2.0~3.7 |
Reserved field (byte) |
보류된 필드입니다. |
STATUS_CODE (상태 코드)
Mech-MSR은 다음 5개의 상태 코드를 반환할 수 있습니다.
-
일반 상태 코드: 0은 명령이 성공적으로 실행되었음을 나타냅니다.
-
오류 코드 : -1, -2, -3, -4. 자세한 내용은 오류 코드를 참조하십시오.
JUDGE (판정 결과)
출력 관리 창의 통신 출력 탭에 추가된 측정 항목에 대한 판정 결과입니다. 0은 OK, 1은 NG를 나타냅니다.
| 단일 프로젝트에 대해 한 번에 최대 64개의 판정 결과를 출력할 수 있습니다. |