X 方向アライメント
プロファイルの X 方向のズレを補正します。対象物表面のエッジを選択し、エッジ高さとズレ許容範囲を設定して対象物のエッジの歪みを補正できます。
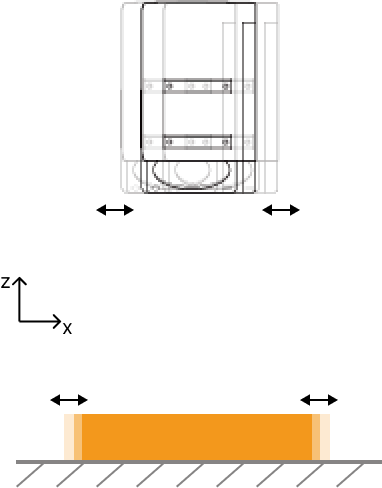
下図に示すように、対象物またはセンサーヘッドが X 方向に沿って振動するとプロファイルに X 方向のズレが発生します。
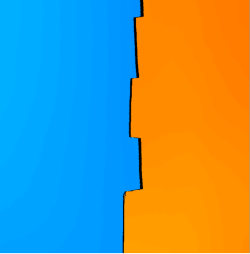
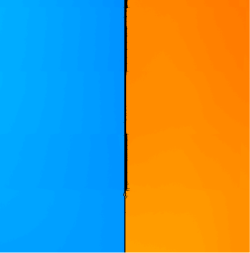
他のパラメータを同じ値に設定した場合、X 方向アライメント使用・不使用の深度画像は以下のように異なります。
| 対象物 | 不使用 | 使用 |
|---|---|---|
|
|
|
以下の手順を実行します。
-
データ収集エリアの
 ボタンをクリックしてデータを取得します。
ボタンをクリックしてデータを取得します。 -
スキャンモードでは、X 方向アライメントの右の編集ボタンをクリックして X 方向アライメントツールを開きます。
-
左でツールを選択して深度画像の補正領域を追加・調整します。
補正領域を 5つまで追加できます。
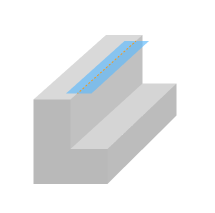
補正領域は、対象物から補正したいエッジを選択します。補正するエッジは直線にフィッティングされ、基準エッジとして使用されます。
以下のように補正領域を選択します。
-
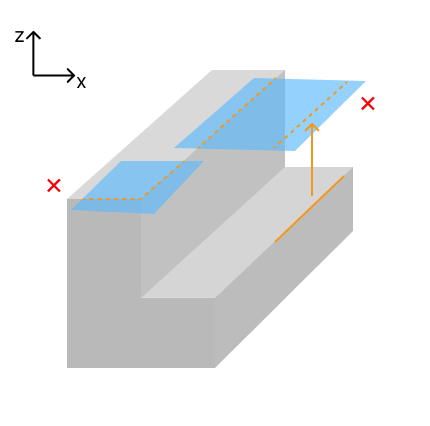
補正領域間は重なり合わないように選択します。
-
補正領域に対象物のエッジがあり、かつエッジが 1つだけあります。また、以下のようなエッジを選択します。
-
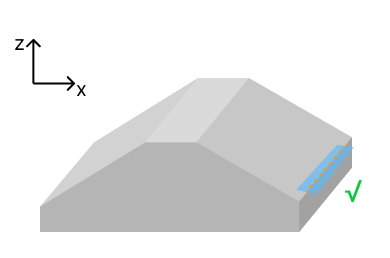
直線のエッジ。
-
エッジにある点と X 方向に沿って隣接する点との間に明らかな高さの差があります。
OK NG 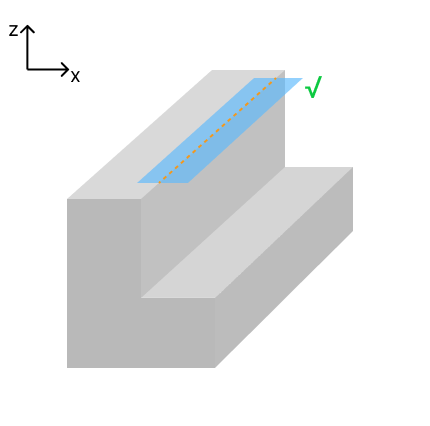
-
補正領域に複数のエッジがある
-
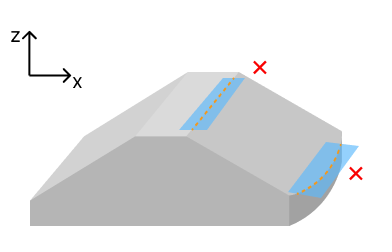
エッジにある点と隣接する点とは明らかな高さの差がない
-
エッジは曲線
-
-
-
-
エッジの高さを設定し、補正するエッジにある点と X 方向に沿って隣接する点との高さの差(下図の ΔZ)よりやや小さく、補正領域内の深度値変動よりやや大きくします。
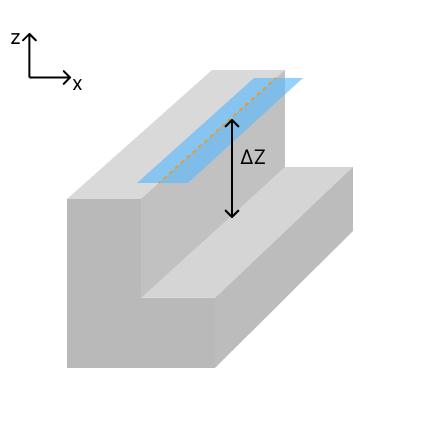
複数の補正領域を追加した場合、エッジの高さの値をいずれの ΔZ よりもやや小さく、全ての補正領域内の深度値変動よりやや大きくします。
各型式のインラインプロファイル測定器のエッジの高さ範囲と調整ステップサイズは以下の通りです。
型式 設定可能範囲(mm) 調整ステップサイズ(mm) LNX-7515
0~8.0
0.1
LNX-7530
0~25.0
LNX-7580
0~80.0
LNX-75150
0~231.0
LNX-75300
0~295.0
LNX-8030
0~30.0
LNX-8080
0~100.0
LNX-8300
0~305.0
-
ズレ許容範囲を設定します。補正するエッジにある基準エッジまでの距離がズレ許容範囲以上の点(下図の ΔX)は基準エッジに整列され、ズレ許容範囲より近い点は調整されません。
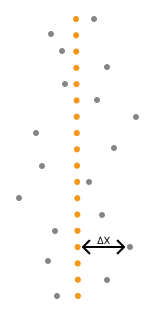
複数の補正領域を追加した場合、全ての補正領域にあるエッジの点は設定したズレ許容範囲に従って整列されます。
各型式のインラインプロファイル測定器のズレ許容範囲の設定可能範囲と調整ステップサイズは以下の通りです。
型式 設定可能範囲(mm) 調整ステップサイズ(mm) LNX-7515
0~15.5
0.1
LNX-7530
0~40.0
LNX-7580
0~100.0
LNX-75150
0~190.0
LNX-75300
0~450.0
LNX-8030
0~40.0
LNX-8080
0~100.0
LNX-8300
0~450.0
-
アラインメントボタンをクリックして X 方向アライメントの効果を確認します。
-
効果が要求を満たした場合、適用ボタンをクリックしてからX 方向アライメントツールを閉じます。
適用ボタンをクリックすると X 方向アライメント機能は自動的にオンになります。次回にデータを収集する時、ツールの設定に従ってアライメントします。
X 方向アライメントを実行しない場合、オフにしてからデータを収集してください。
-
満たさない場合に手順 3~6 を繰り返します。
-
-
再度データを収集して死角 X 方向アライメント実行後の深度画像と点群を取得します。