抓取点排序(层内和层间)¶
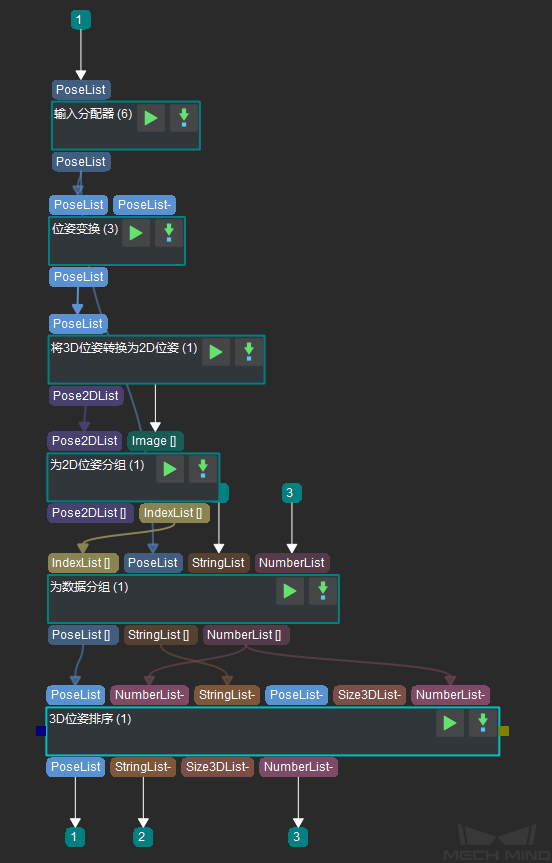
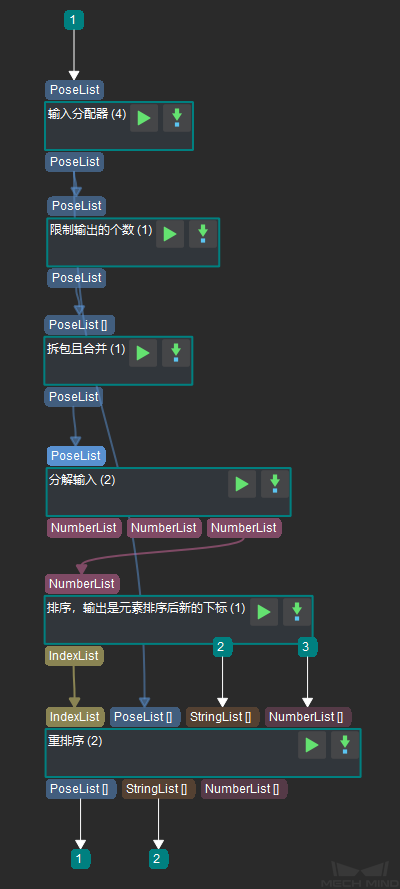
对于多种物体散乱摆放的复杂情况,抓取时需要同时考虑物体所在的高度和抓取成功的概率,为解决这一问题, 该步骤组合将空间抓取点按照高度信息进行分层,得到对应的平面抓取点,再按照指定的规则对每层的抓取点排序,得到符合要求的索引列表并以此为标准对空间抓取点排序。 其组成如图1 所示。
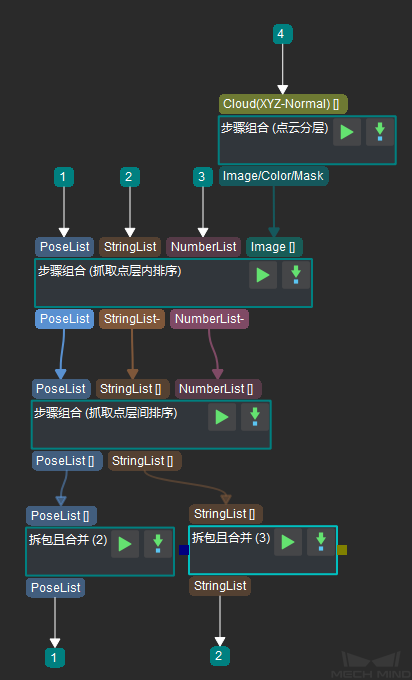
图1 排序抓取点步骤组合¶
各个步骤的作用如下:
点云分层¶
其组成如图2 所示。
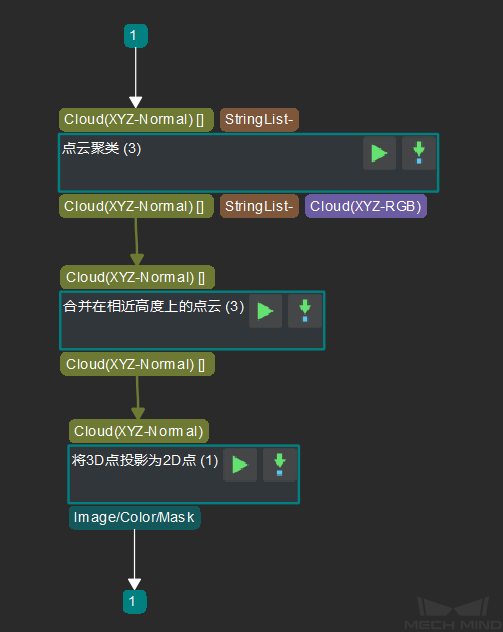
图2 点云分层步骤组合¶
各个步骤的作用如下:
点云聚类 输入感兴趣区域内的点云,将符合规则的点归为一类,并输出点云列表。
合并在相近高度上的点云 输入上一步的结果,将指定方向上一定高度范围内的多个点云合为一个,输出合并后的点云列表。
将3D点云投影为2D图像 输入合并后的点云列表,计算每个3D点在平面上的投影,得到对应的2D图即掩膜,并输出。