根据概率图计算抓取点¶
输入预测成功抓取的概率图,原始深度图和彩色图,计算平面抓取点并为其指定抓具(该工程为吸盘)标签。其组成如图1 所示。
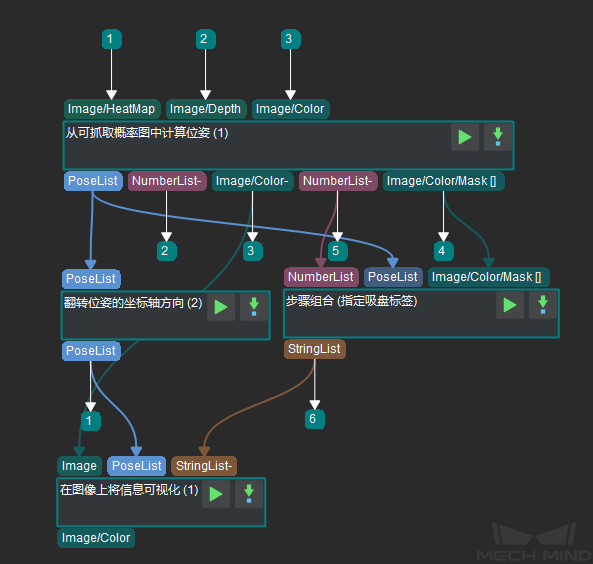
图1 根据概率图计算抓取点(严格参数)步骤组合¶
各个步骤的作用如下:
从可抓取概率图中计算位姿 输入预测成功抓取的概率图,原始深度图和彩色图,输出符合条件的平面抓取点、对应的置信度及可视化的彩色图,根据结果推荐每个平面抓取点对应的抓具直径并给出可抓取区域的掩膜。
翻转位姿的坐标轴方向 输入上一步骤计算出的平面抓取点,将抓取点的指定轴旋转至特定方向,并输出。
指定吸盘标签 为第一步得到的平面抓取点指定吸盘标签。
在图像上将信息可视化 在输入的彩色图上,标注翻转后的平面抓取抓取点及其对应的吸盘标签。
指定吸盘标签¶
输入 从可抓取概率图中计算位姿 得到平面抓取点及其对应的置信度和可抓取区域的掩膜,指定抓取物体分类标准,生成标签文件。 组成如图2 所示。
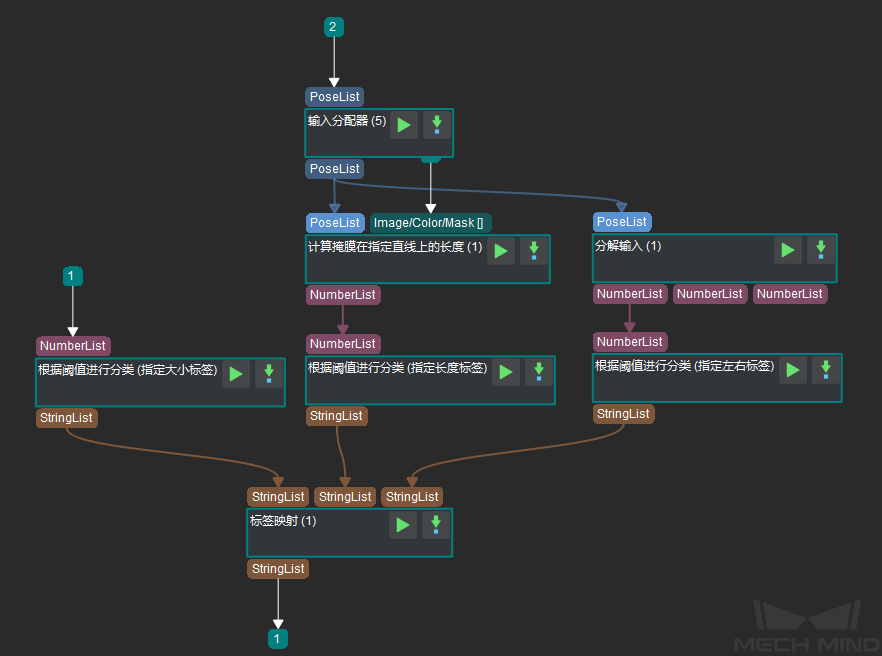
图2 指定吸盘标签步骤组合¶
各个步骤的作用如下:
根据阈值对数值进行分类 输入需要分类的数组,根据设置中的阈值和标签文件将其分类,输出标签。
计算掩膜在指定直线上的长度 输入平面抓取点及其对应的可抓取区域的掩膜,计算掩膜中平面抓取点的长度,并输出。
输入分配器 将输入量分配给之后几个步骤。
分解物体尺寸 将一个三维输入分解为三个一维列表,根据需求输出对应的列表。
标签映射 输入经过不同分类标准得到的标签,根据设置的标签组合规则,得到单个标签列表。