匹配¶
匹配根据模板的点云情况可分为边缘模板匹配、全模板匹配,根据模板的种类多少可分为单模板匹配、多模板匹配。 本章节主要介绍全模板中的的单模板匹配、多模板匹配。
模板选取
模板选取主要由现场相机点云效果、项目精度、节拍等多重因素决定。
- 边缘模板匹配适用于:
不需要高精度的位姿输出的场景(如使用柔性夹具)。
现场相机点云质量一般的场景。
对于节拍有一定限制的场景。
- 全模板匹配适用于:
需要较高精度的位姿输出的场景(如使用刚性夹具)。
现场相机点云质量好的场景。
对于节拍要求没那么高的场景。
匹配方式选取
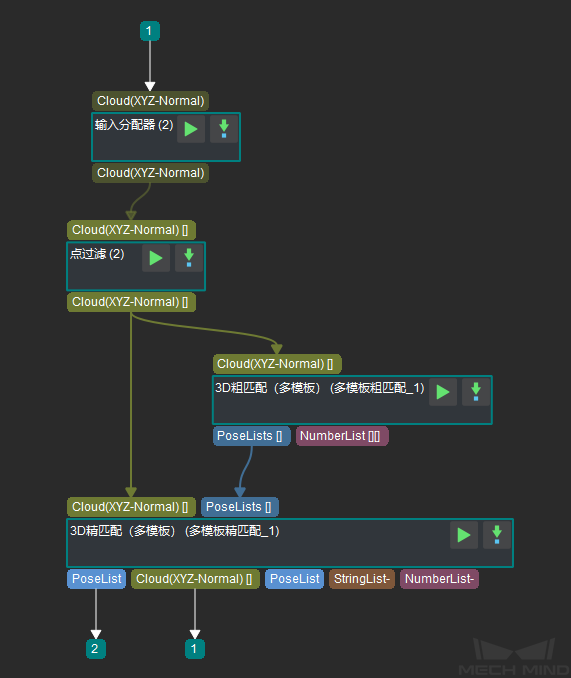
根据需要匹配的模板种类进行选取,多种物体匹配选择多模板匹配。
模板制作
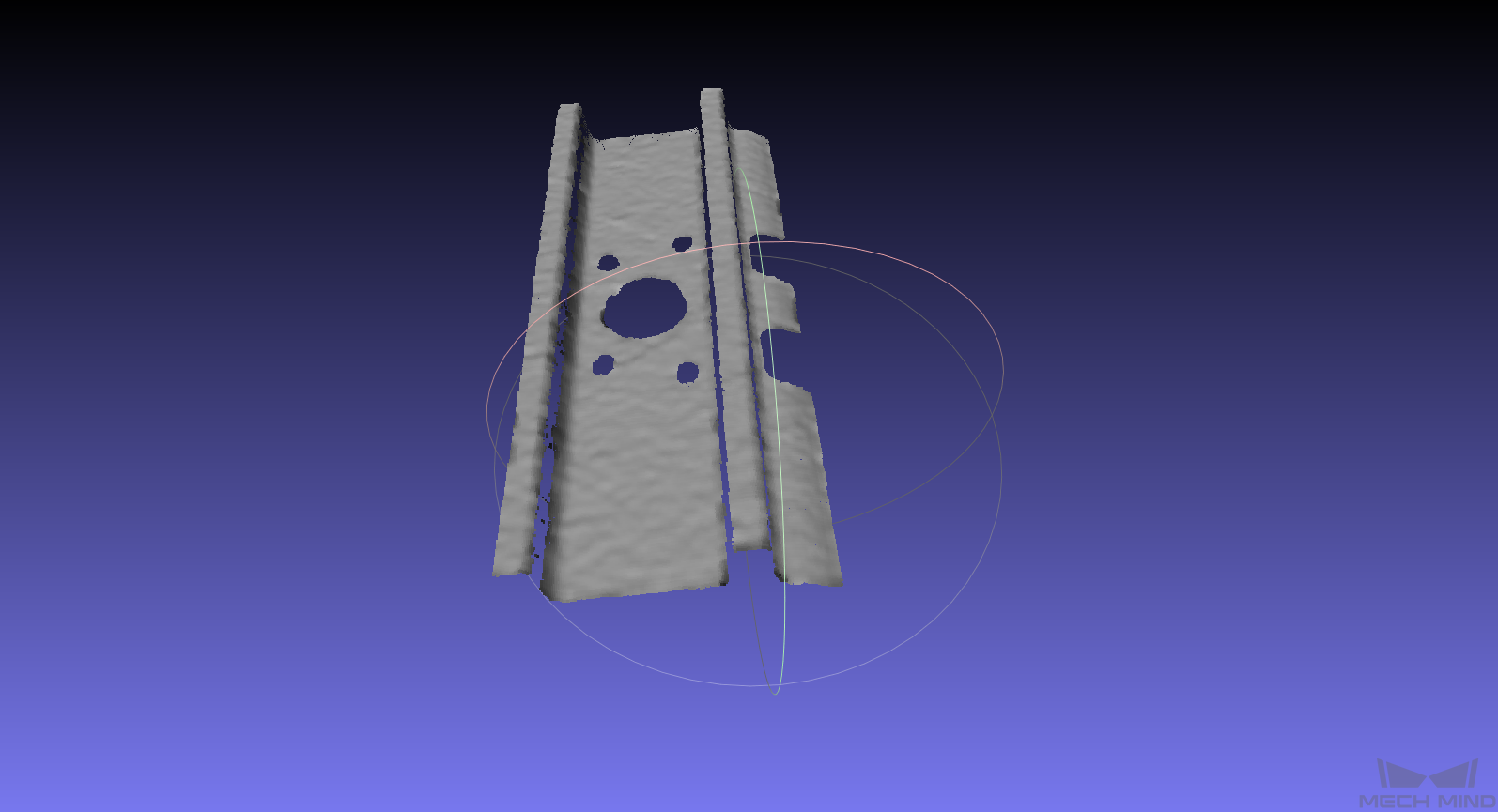
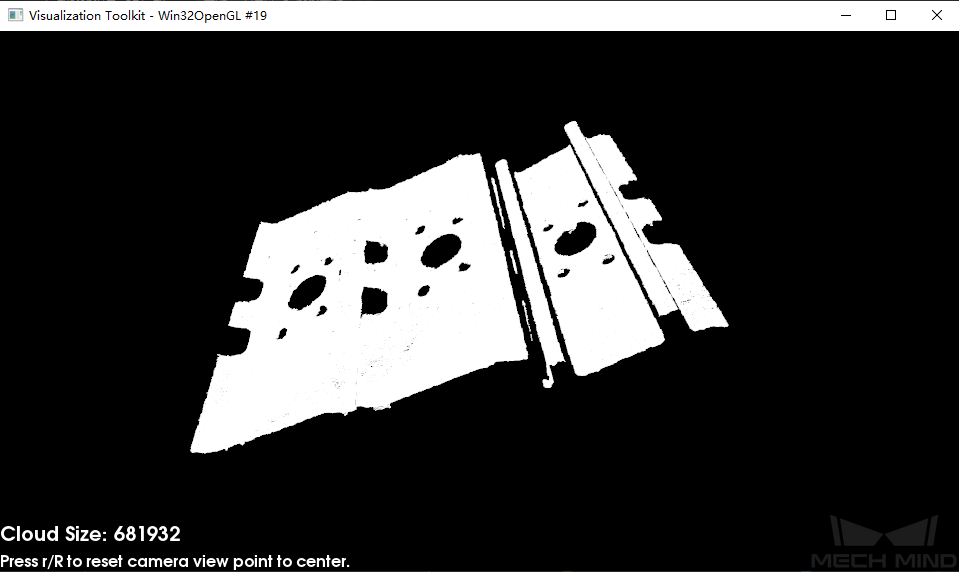
采集原始点云图像:通过相机获取点云图像,并保存下来。
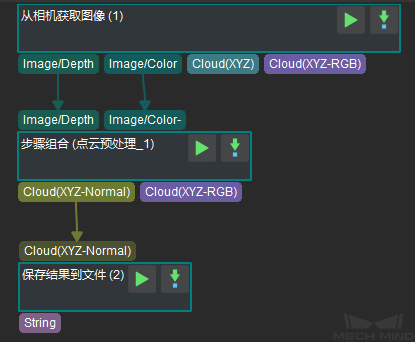
图1 采集原始点云图像¶
用户也可在Mech-Vision的 中进行采集操作。
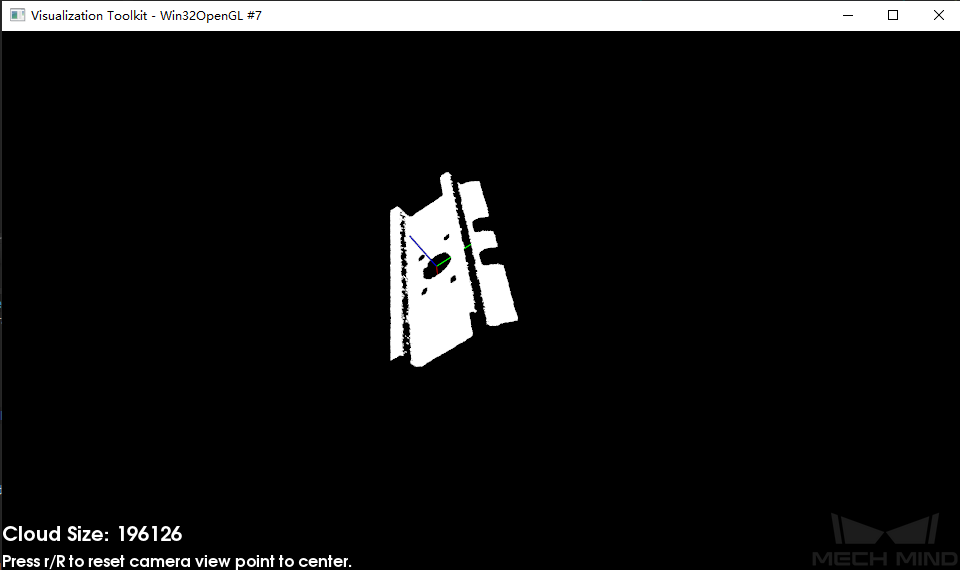
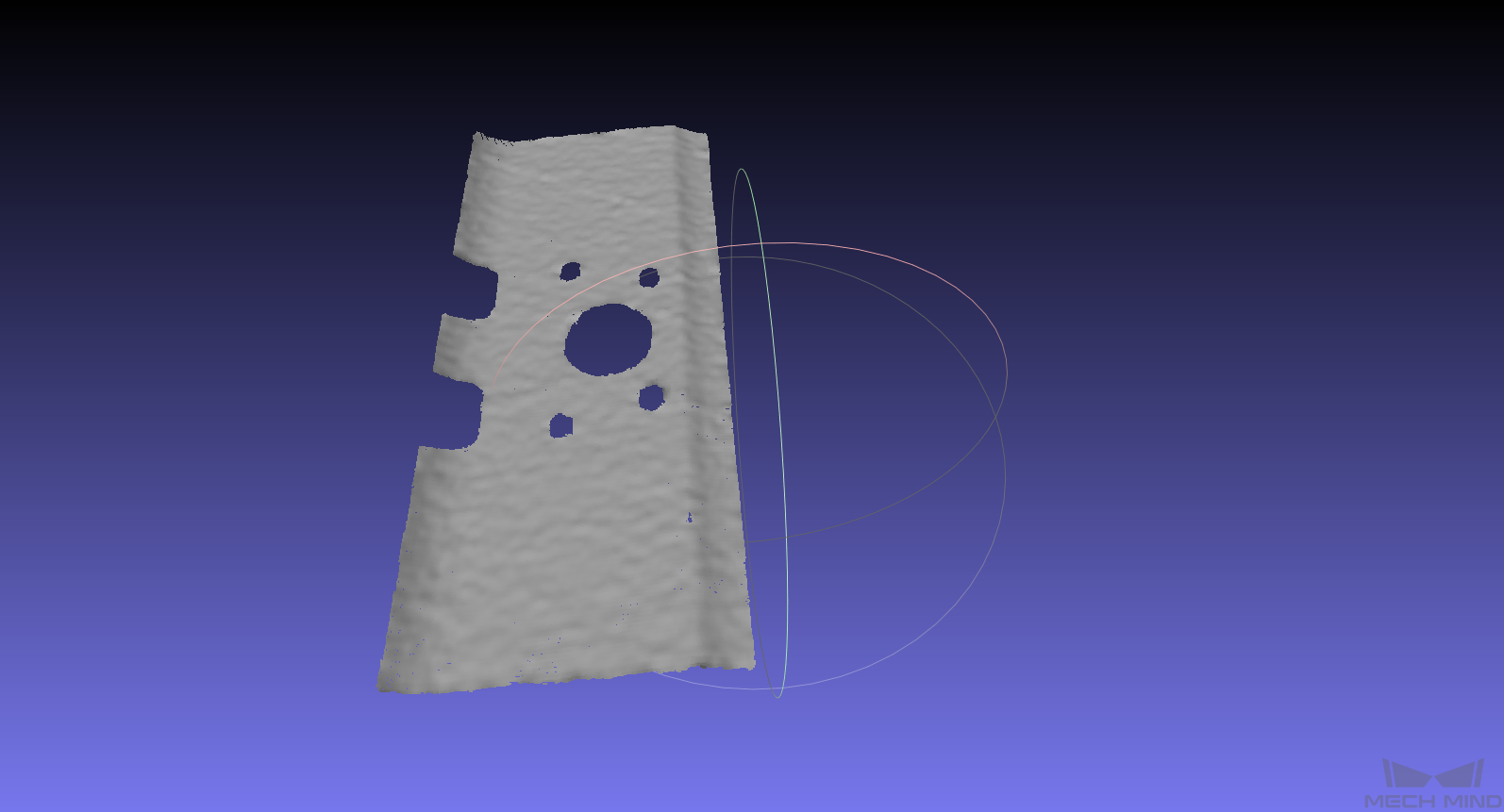
制作点云全模板文件:在Mech-Vision的 中打开采集的原始点云图像,编辑点云去除杂点。
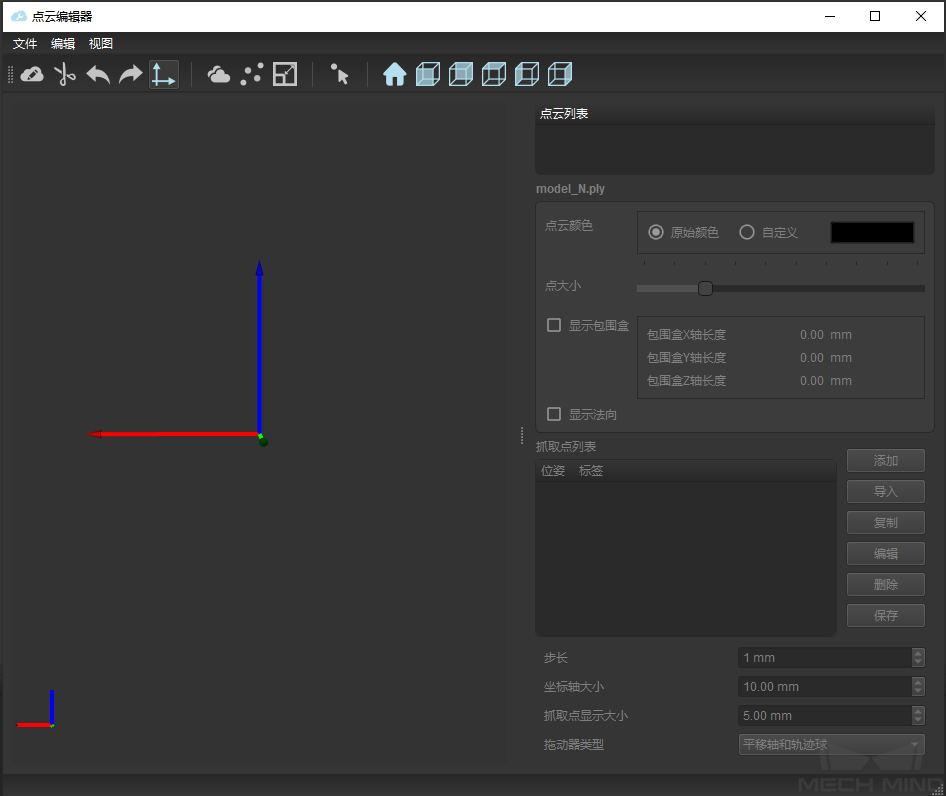
图2 点云编辑器¶
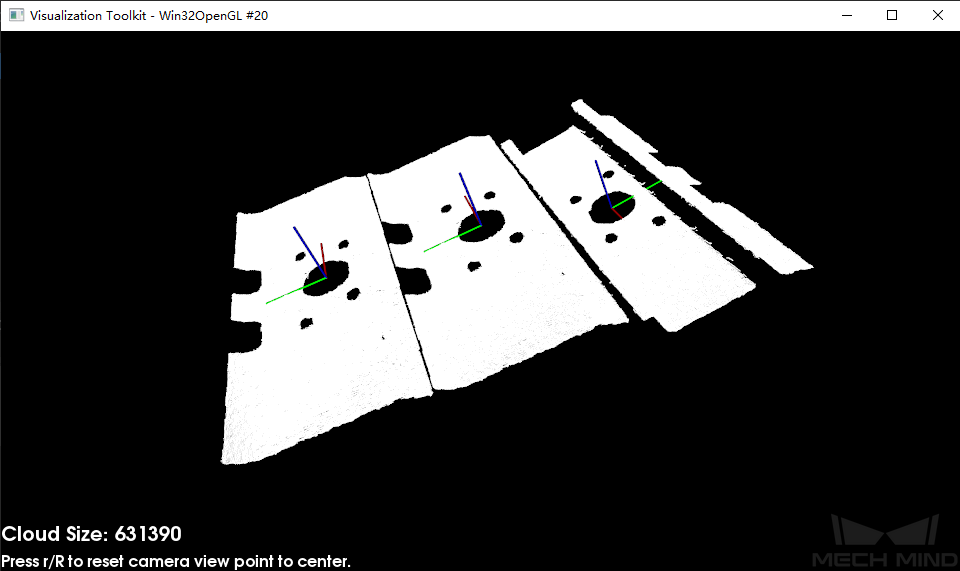
边缘提取:通过全模板文件进行粗略的边缘提取。
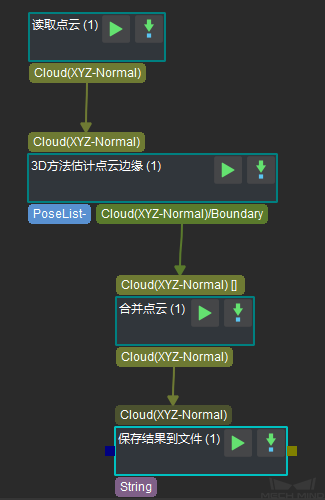
图3 点云边缘提取¶
制作边缘模板文件:在 点云编辑器 中去除点云边缘文件的杂点,并保存为边缘模板文件。
抓取点设置
参考 添加抓取点 进行设置。
匹配的基础步骤组合
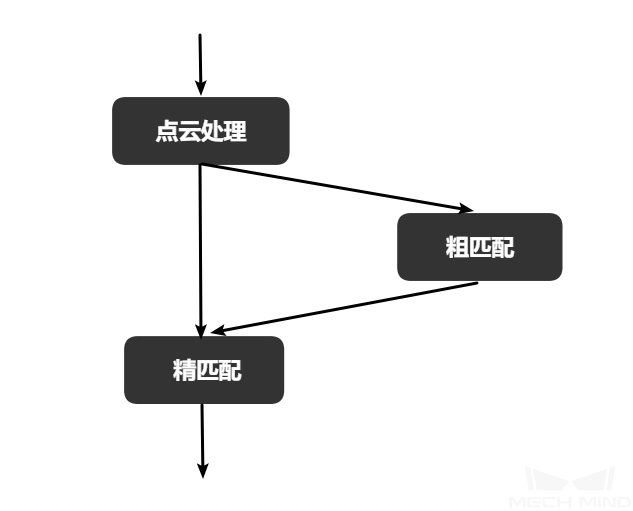
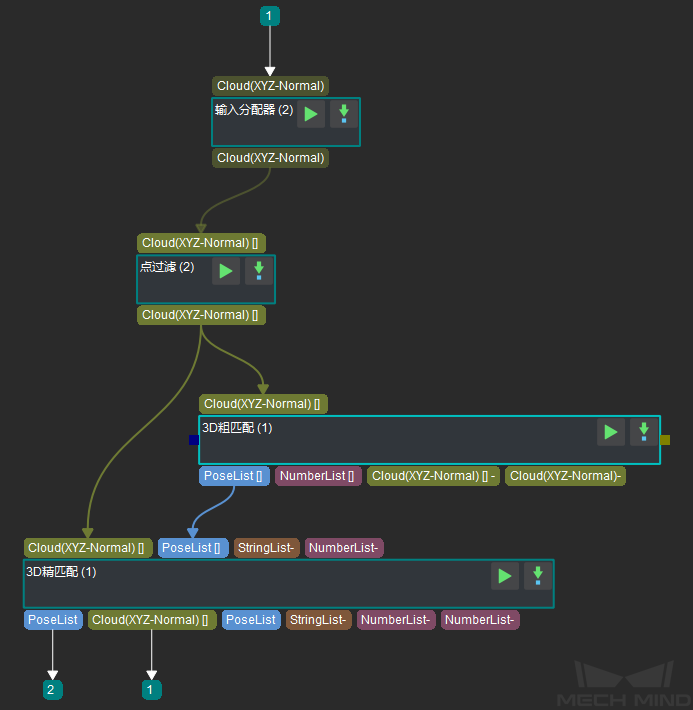
图4 匹配的步骤组合¶
如图4所示,匹配的基础步骤组合包含 点云处理、 粗匹配 和 精匹配 三部分,具体流程如下:
由 点云处理 部分完成对输入到匹配中的点云做最后的优化。
粗匹配 通过模板点云和场景点云之间的匹配,计算场景点云与模板点云之间的候选位姿转换关系。
精匹配 根据迭代算法进行模板局部匹配,可提高匹配精度。