计算物体的抓取位姿和尺寸¶
计算物体的抓取位姿和尺寸的主要功能是利用目标点云,计算出点云的抓取点位姿和物体尺寸。一般使用在拆垛的情况下。其组成如图1 所示。
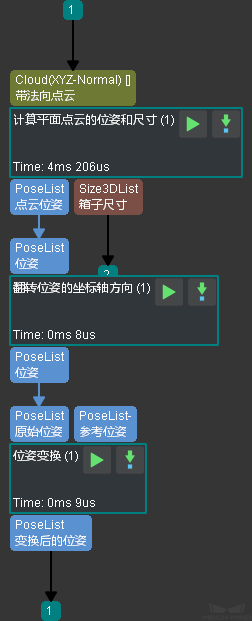
图1 计算物体的抓取位姿和尺寸步骤组合¶
各个步骤的作用如下:
计算平面点云的位姿和尺寸 输入点云,计算平面点云的位姿和尺寸。
翻转位姿的坐标轴方向 对于不合适的位姿将坐标轴进行调整。
位姿变换 将物体抓取位姿从相机坐标系转移到机器人坐标系下(也可以自定义坐标系变换)。
计算物体的抓取位姿和尺寸的主要功能是利用目标点云,计算出点云的抓取点位姿和物体尺寸。一般使用在拆垛的情况下。其组成如图1 所示。
图1 计算物体的抓取位姿和尺寸步骤组合¶
各个步骤的作用如下:
计算平面点云的位姿和尺寸 输入点云,计算平面点云的位姿和尺寸。
翻转位姿的坐标轴方向 对于不合适的位姿将坐标轴进行调整。
位姿变换 将物体抓取位姿从相机坐标系转移到机器人坐标系下(也可以自定义坐标系变换)。