位姿变换¶
功能描述
将位姿从一个坐标系转换到其他坐标系,或依据参考位姿在自身坐标系内变换。
使用场景
通常用于位姿在相机坐标系与机器人坐标系中的相互变换。
输入与输出
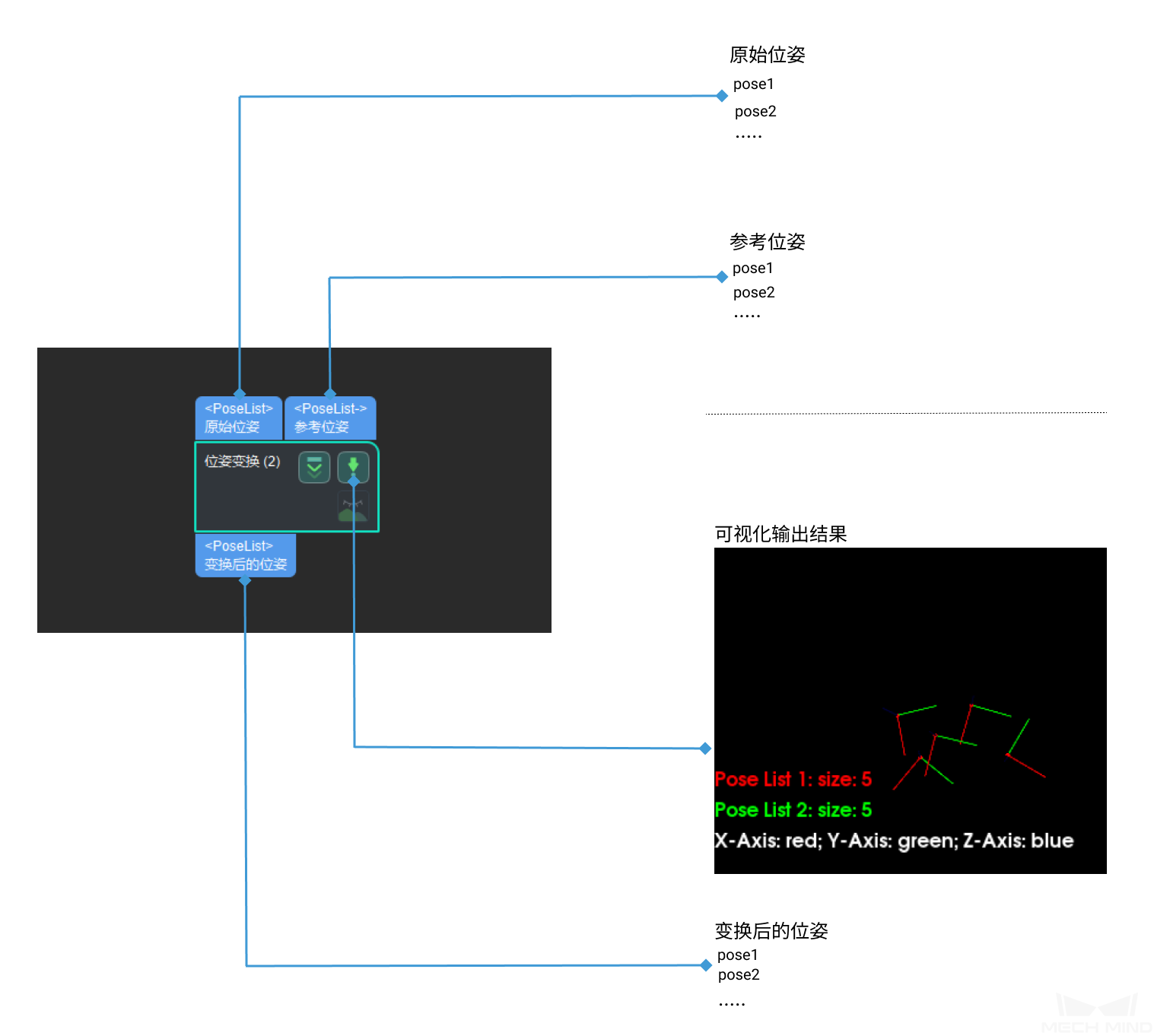
参数说明
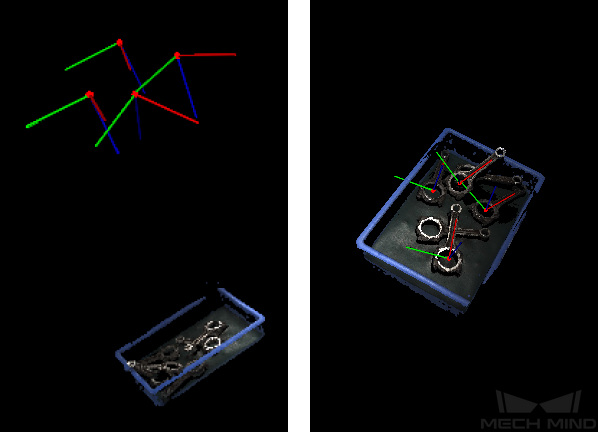
可视化设置
- 在选定坐标系下显示
相机坐标系: 调试输出 窗口显示相机坐标系下的可视化输出结果,如下图左所示。
机器人坐标系:默认值。 调试输出 窗口显示机器人坐标系下的可视化输出结果,如下图右所示。
小技巧
选择机器人坐标系时, 调试输出 窗口为黑色屏幕,需调整点云方向才可看到点云及坐标。
选择相机坐标系时, 调试输出 窗口仅显示点云,需调整点云方向才可看到坐标。
变换设置
- 变换类型
CameraToRobot :默认值,将位姿从相机坐标系转换到机器人坐标系。
RobotToCamera :将位姿从机器人坐标系转换到相机坐标系。
AllWithFrst :将所有原始位姿变换到第一个参考位姿所在坐标系,需输入参考位姿列表。
FirstWithAll :将第一个原始位姿变换到所有参考位姿所在坐标系,需输入参考位姿列表。
UseCorrespondenceInput :一对一变换,将原始位姿转换到参考位姿所在坐标系,需输入参考位姿列表,且输入位姿个数与参考位姿个数相等。