机器人手眼标定使用指南¶
手眼标定指的是 统一视觉系统和机器人的坐标系 ,从而使视觉系统所确定的物体位姿能够转换到机器人坐标系下,由机器人完成对物体的作业。要实现由图像目标点到实际物体上的抓取点之间的坐标转换,就必须拥有准确的相机内外参信息。
相机内参是什么?
相机内参是相机内部的基本参数,包括镜头焦距、畸变等。一般相机出厂时内参已标定完成,保存在相机内部。
相机外参是什么?
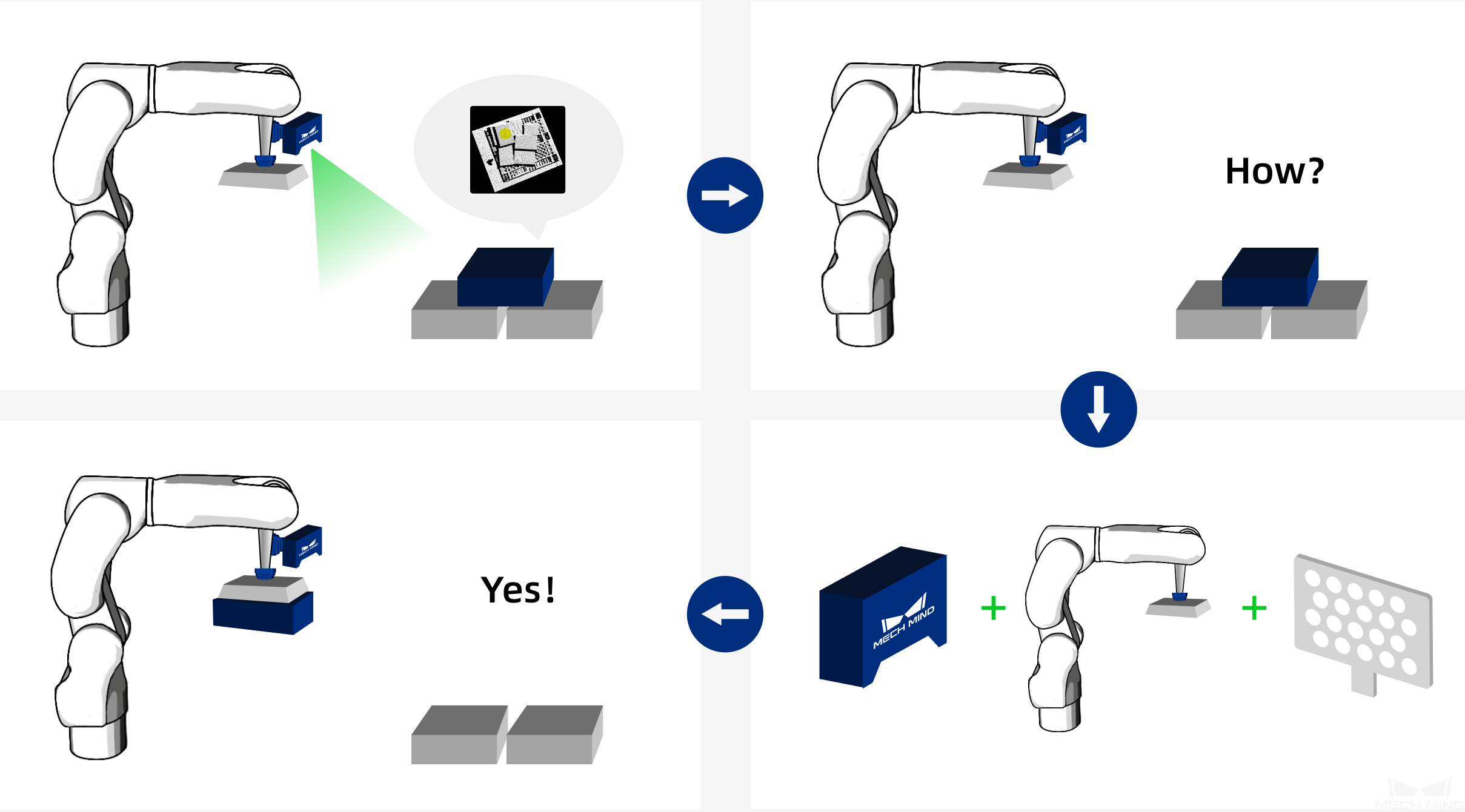
相机外参表示的是机器人与相机之间的位姿转换关系(即手眼关系,因此相机外参的标定称之为机器人手眼标定)。机器人与相机在不同的使用场景下其相对位姿不固定,需要在工作现场进行标定才能获得相机与机器人之间的手眼关系。
正式开始标定前需完成 必要的准备工作 ,查看以下内容完成相关准备工作
相机标定分为标准模式与快速模式,首次标定时请使用标准模式来完成相机标定
一些项目现场中更换工位相机后,需重新对相机标定,快速模式可用来快捷方便地更换同型号相机
完成标定后,查看以下内容来 分析标定结果
通过查看以下内容来解决标定中 常见的问题