开始标定¶
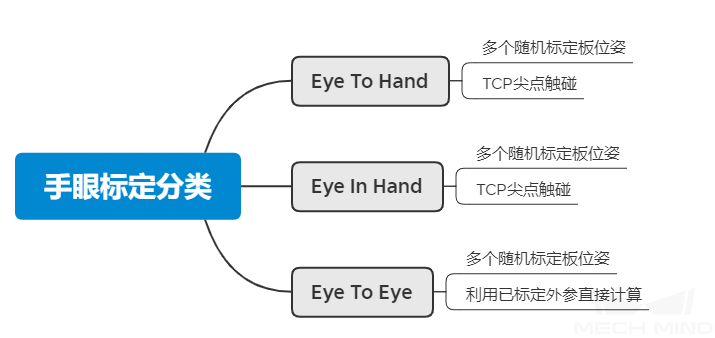
多个随机标定板位姿与TCP尖点触碰的主要区别在于:
多个随机标定板位姿:使用软件自动生成的路径点或手动添加的多个位姿,在每个位姿拍照并识别标定板角点,建立标定板、相机及机器人三者间的关系,其过程简单,标定精度高。
TCP尖点触碰:利用三点法确定标定板位姿后,建立标定板、相机及机器人三者间的关系。适用于机器人活动空间局促、标定板无法安装等情况。
用户可依据实际情况来选择合适的标定方式,并查看对应章节中的内容。
对于无法使用 Mech-Viz 软件控制机器人的特殊情况,用户可手动添加标定点进行标定。