标定前准备¶
机器人手眼标定的分类方式各不相同,根据相机相对于机器人的安装方式,将手眼标定分为三种:
相机独立于机器人固定在支架上,称为ETH(Eye To Hand)方式。
相机固定于机器人末端法兰上,称为EIH(Eye In Hand)方式。
双相机独立于机器人固定在支架上,称为ETE(Eye To Eye)方式。
安装/放置相机标定板¶
选取一个正常标定板:标定板上圆点清晰,没有明显刮花痕迹,标定板没有明显弯曲变形视为正常标定板。
ETH方式下,先将机器人专用的标定板连接件安装到机器人末端法兰上,再将标定板安装到连接件上。确保标定板安装稳固,标定板与机器人末端的XY平面平行。
注解
当机器人法兰装载不可拆卸夹具时,可将标定板直接固接在夹具上。
EIH方式将标定板平放在工作平面的中心位置。
其安装和放置如 图1所示(左图为ETH方式,右图为EIH方式):
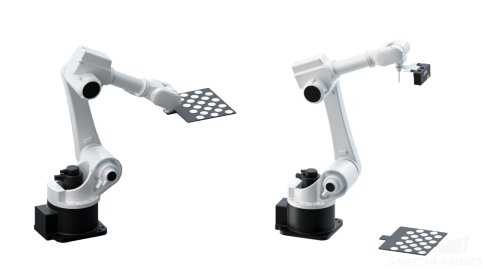
图1 安装与放置标定板¶
标定板安装完毕后将机器人移动到起始标定位置。如 图2所示,左侧为ETH方式,右侧为EIH方式。
ETH方式,机器人起始标定位置为视野最下方中间位置(机器人带动标定板由下往上层层标定);
EIH方式,起始位置为相机工作位置(机器人带动相机由下往上层层标定)。

图2 标定起始位置¶
注解
使用TCP触碰法时ETH和EIH均将标定板放置在相机工作平面内。
连接机器人¶
此步骤只适用于可以正常通过Mech-Center连接的机器人。
连接机器人。
检查机器人连接状态(即相机、机器人、工控机三者之间通过路由器连接正常),确保Mech-Viz可以驱动机器人,机器人姿态与Mech-Viz仿真界面内一致。
连接机器人成功后显示如 图3所示:(软件界面显示的机器人型号应与实际机器人型号一致)
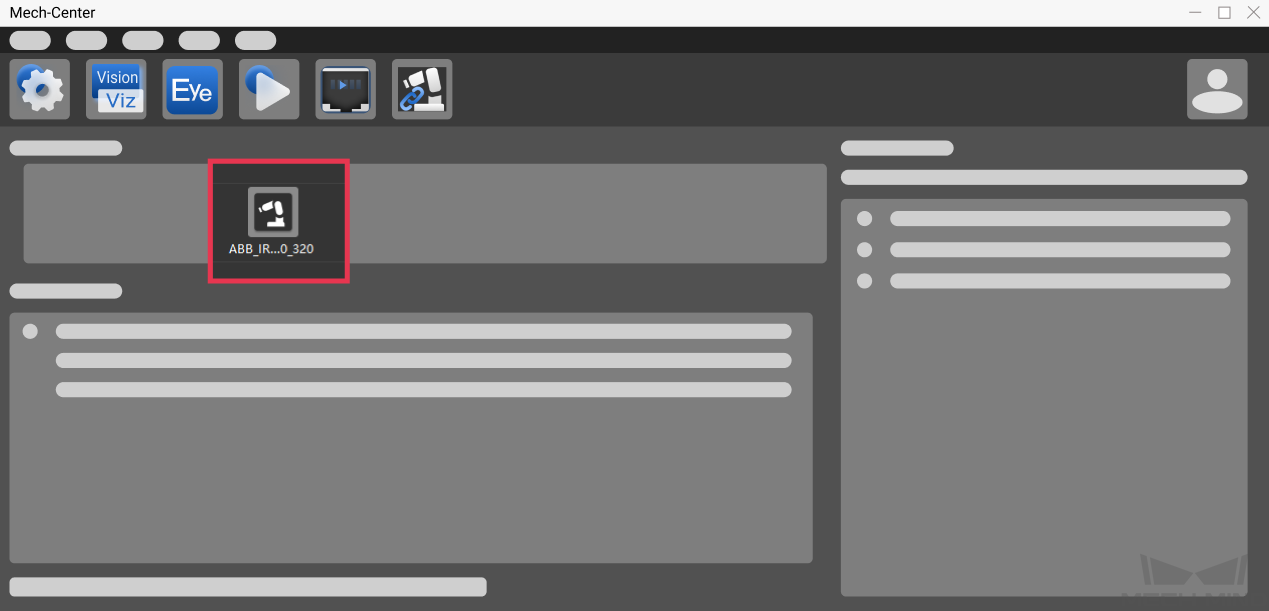
图3 连接机器人¶