手动标定步骤¶
本章将介绍:当遇到机器人无法使用Mech-Viz控制的情况时,手动添加标定点的方法。
首先,在标定预配置界面选择所需使用的标定方式,并根据使用的机器人选择机器人类型,如下图所示,完成预配置。
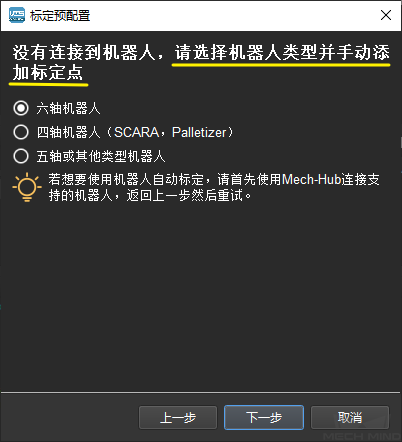
图1 选择机器人型号¶
多个随机标定板位姿标定方式¶
多个随机标定板位姿的标定步骤:
本章将介绍:当遇到机器人无法使用Mech-Viz控制的情况时,手动添加标定点的方法。
首先,在标定预配置界面选择所需使用的标定方式,并根据使用的机器人选择机器人类型,如下图所示,完成预配置。
图1 选择机器人型号¶
多个随机标定板位姿的标定步骤: