根据位姿精确计算抓取点¶
输入带有法向量的点云和平面位姿列表,计算三维抓取点。其组成如图1 所示。
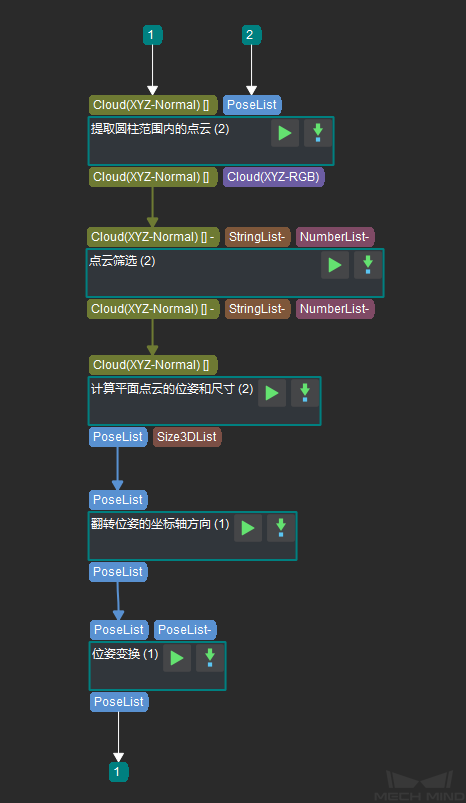
图1 根据位姿精确计算抓取点步骤组合¶
各个步骤的作用如下:
提取圆柱范围内的点云 输入带有法向量的点云和平面抓取点列表,提取设定的圆柱内的点云。
计算掩膜在指定直线上的长度 输入上一步提取的点云,按照设置参数,去掉无用的点,输出过滤后的点云。
计算平面点云的位姿和尺寸 输入过滤后的点云,计算每个点云对应的抓取点并输出三维抓取点列表。
翻转位姿的坐标轴方向 输入抓取点列表,通过旋转,使其指定方向大体一致,方便后续抓取。输出翻转后的抓取点列表。
位姿变换 输入上一步骤的结果,变换抓取点的坐标系。