2D矩形匹配(深度学习)¶
2D矩形匹配(深度学习)可以计算纹理复杂、紧密贴合、单一品类的立方体的位置和抓取点。 其输入为:原始彩色图,原始深度图,实例分割得到的掩膜,最高层掩膜,原始点云和实际物体尺寸。 深度学习的先验信息可以提供物体的大体位置,然后通过精确的边缘匹配,获得较为准确的物体位置和抓取点。 主要流程可分为检测掩膜对应图像中的直线、生成矩形边缘模板、2D匹配和计算滤除重叠后的多边形的尺寸和位姿四部分, 如图1 所示。通过 输入分配器 可以将一个输入量分配给之后多个步骤, 实例分割得到的掩膜经过 图像形态学变换,使掩膜图像轮廓适当膨胀,利于后续基于掩膜的直线检测和生成矩形模板。
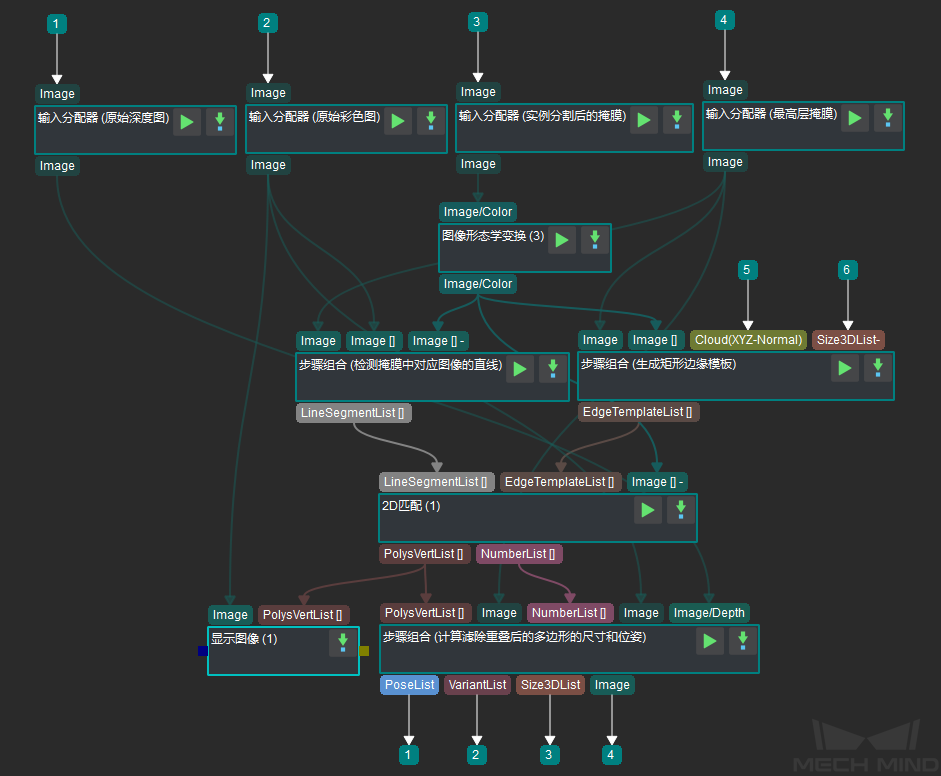
图1 2D矩形匹配(深度学习)步骤组合¶
检测掩膜对应图像中的直线¶
检测掩膜对应图像中的直线的组成如图2 所示。
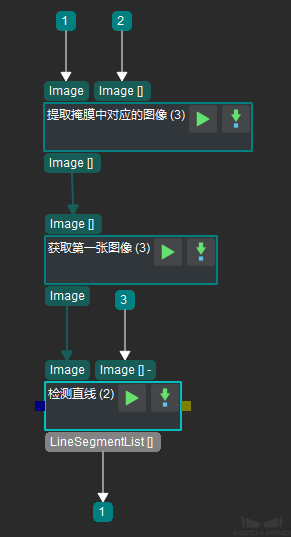
图2 检测掩膜对应图像中的直线步骤组合¶
各个步骤的作用如下:
提取掩膜中对应的图像 计算最高层掩膜和原始彩色图的重叠部分,得到最高层物体的掩膜,输出对应的列表。
获取第一张图像 从图像列表中获取第一张掩膜图像对应的结果图像。
检测线段 输入掩膜图像对应的彩色图和实例分割得到的掩膜,计算分割出的物体中的直线。
生成矩形边缘模板¶
生成矩形边缘模板的组成如图3 所示。
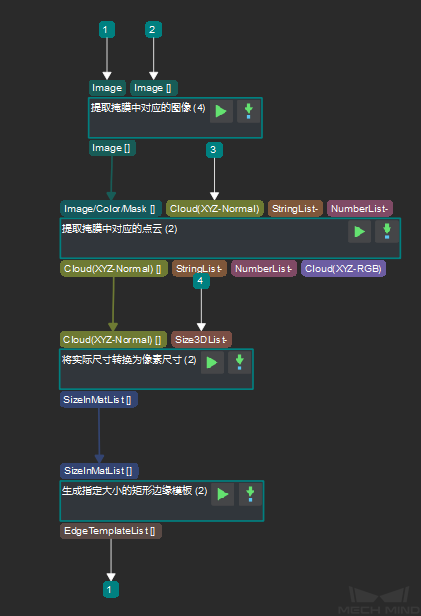
图3 生成矩形边缘模板步骤组合¶
各个步骤的作用如下:
提取掩膜中对应的图像 计算最高层掩膜和实例分割得到的掩膜的重叠部分,得到实例分割后物体的掩膜。
提取掩膜中对应的点云 输入实例分割后物体的掩膜和原始点云,得到实例分割后物体的点云。
将实际尺寸转换为像素尺寸 输入实例分割后物体的点云和物体的实际尺寸,将其物理尺寸用图像处理所需的单位(像素)来表示。
生成指定大小的矩形边缘模板 输入物体以像素为单位的尺寸,生成物体表面(矩形)边缘模板。
2D匹配¶
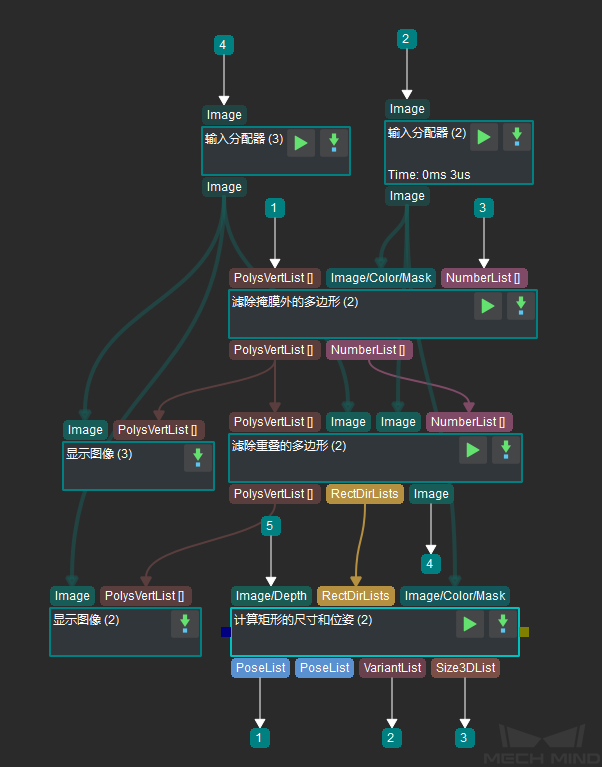
将检测到的直线和生成的矩形边缘模板和进行匹配,输出较为完整的直线段组成的多边形和多边形匹配损失。