点云预处理¶
点云预处理的主要功能是生成点云、删除干扰点,得到在感兴趣区域内的点云。通常用在 从相机获取图像 步骤之后,可以加快处理速度。其组成如图1 所示。
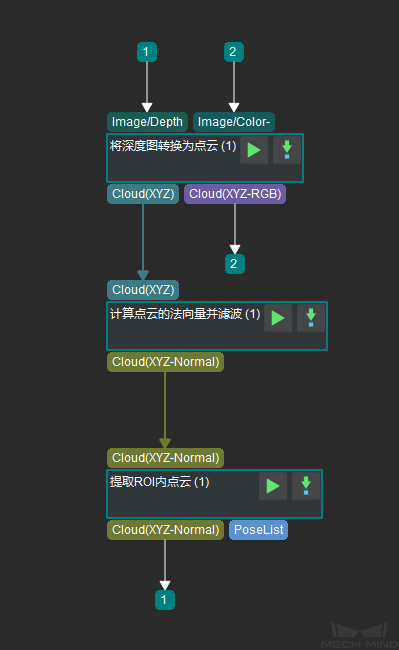
图1 点云预处理步骤组合¶
各个步骤的作用如下:
将深度图转换为点云 输入原始彩色图像和其深度图,输出场景点云。
计算点云的法向量并滤波 输入场景点云,计算其法向量并去掉无用的点,输出过滤后带有法向量的点云。
提取3D ROI内点云 输入上一步处理后的点云,通过设置感兴趣区域(ROI),提取ROI内点云并输出。
点云预处理的主要功能是生成点云、删除干扰点,得到在感兴趣区域内的点云。通常用在 从相机获取图像 步骤之后,可以加快处理速度。其组成如图1 所示。
图1 点云预处理步骤组合¶
各个步骤的作用如下:
将深度图转换为点云 输入原始彩色图像和其深度图,输出场景点云。
计算点云的法向量并滤波 输入场景点云,计算其法向量并去掉无用的点,输出过滤后带有法向量的点云。
提取3D ROI内点云 输入上一步处理后的点云,通过设置感兴趣区域(ROI),提取ROI内点云并输出。