将深度图转换为点云¶
功能描述
用深度图和彩色图生成点云。
使用场景
通常在 从相机获取图像 步骤之后使用,将相机获取的深度图转化为点云图, 可借助感兴趣区去除非必要点云,提升运行速度。
输入与输出
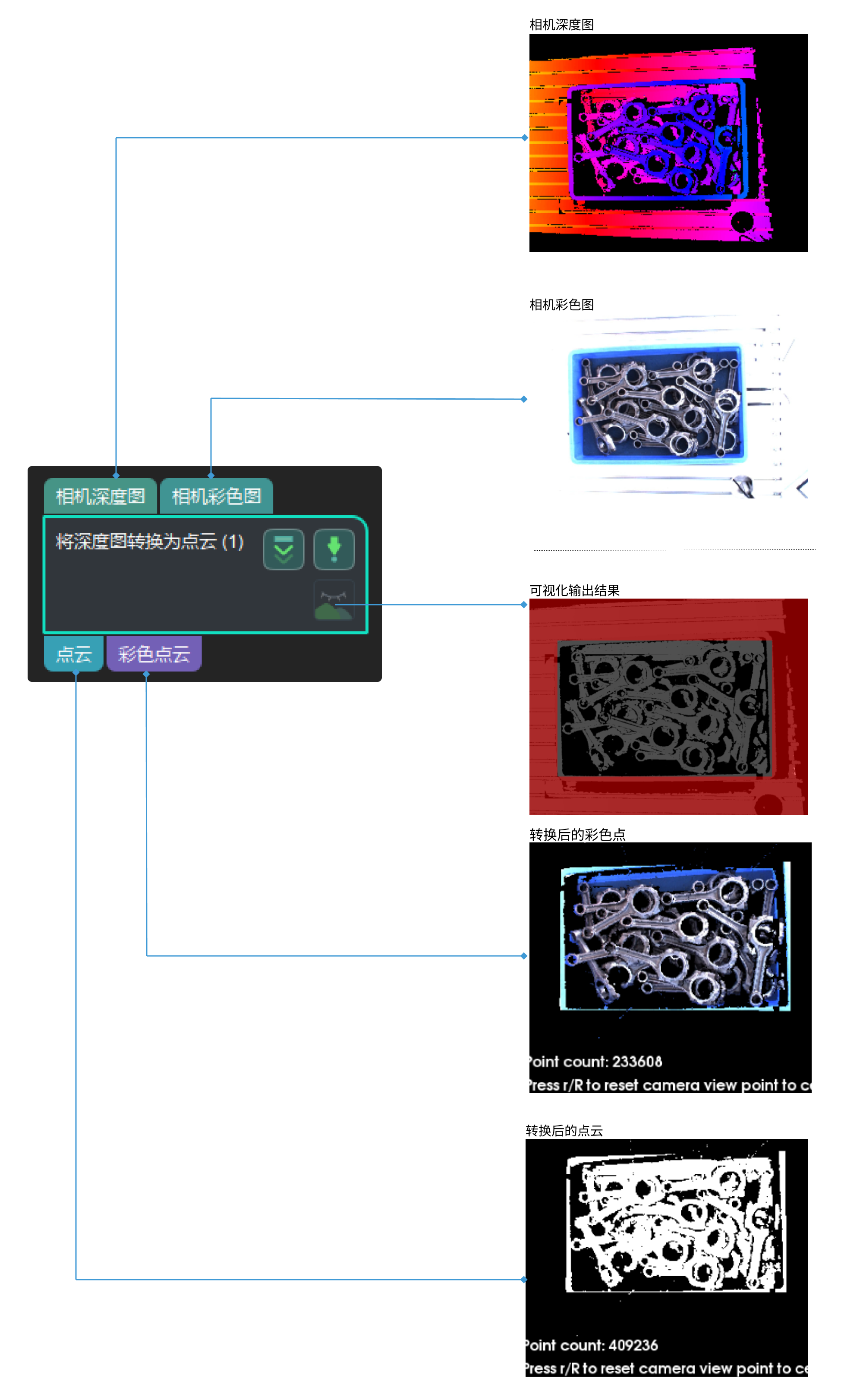
参数说明
深度图ROI文件
调节说明:截取深度图感兴趣区域。调节步骤:1.点击右侧的
进入 设置目标区域界面 。
2.在界面中框选感兴趣区域。3.点击 确定 保存设置。同时在工程根目录下生成 depth_image_roi.json 文件。调节示例:截取不同感兴趣区域对比。
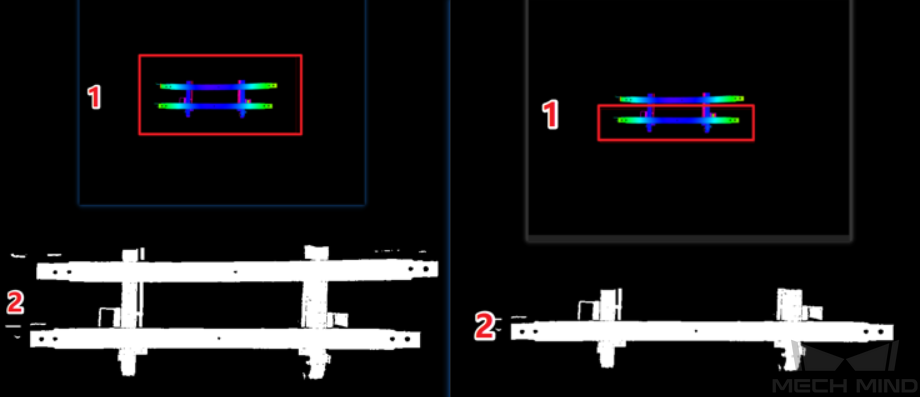
深度图感兴趣区域。
输出点云。
背景移除设置
当 使用深度图去背景 勾选为 True 时才可设置以下参数。
背景深度图片
调节步骤:背景深度图片设置步骤如下(以虚拟相机为例)。点击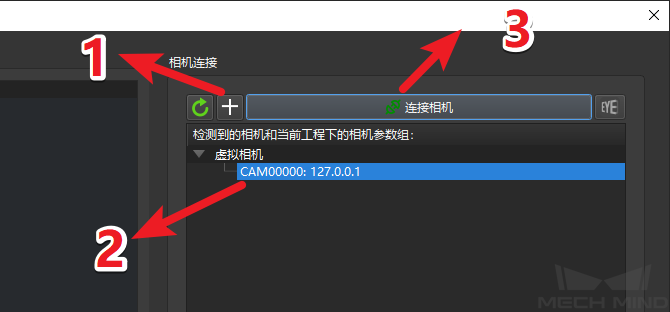
添加虚拟相机。
虚拟相机。
连接相机。
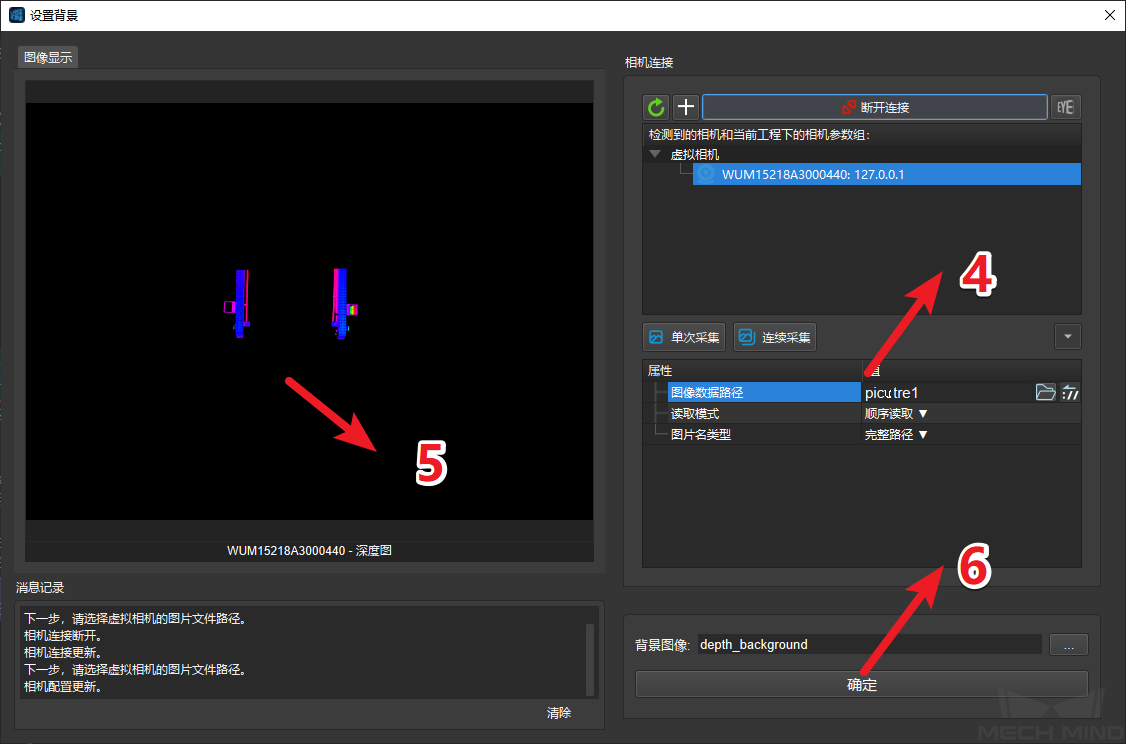
设置图片数据路径。
显示背景图片。
保存背景图片。
背景深度的波动
调节说明:输入深度图像和背景深度图像做比较,深度差在波动范围内的背景将被去除。调节示例:此例中的背景图片为下图中设置的背景图片。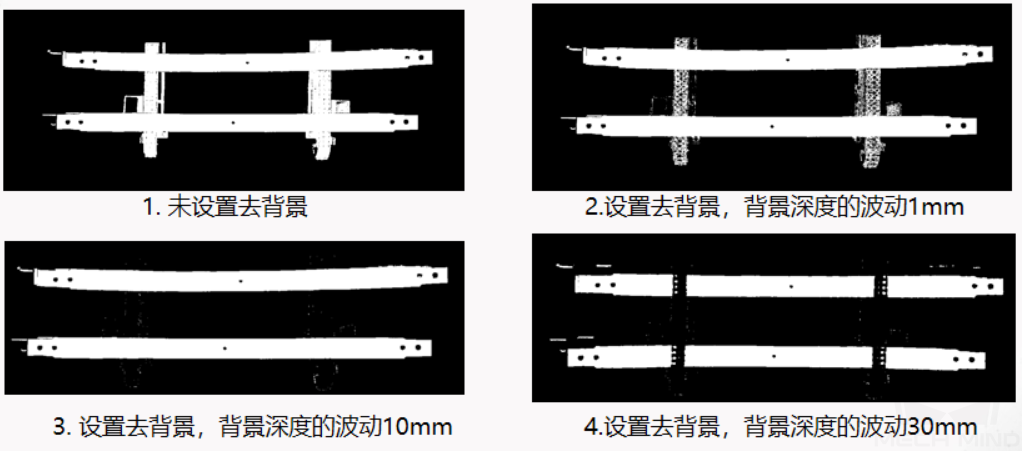 由以上调节可以看出:背景深度的波动设置太小,背景无法完全去除。背景深度波动设置太大,工件点云也将被去除。故 背景深度的波动需要根据现场情况设置适合的值,一般推荐10mm。
由以上调节可以看出:背景深度的波动设置太小,背景无法完全去除。背景深度波动设置太大,工件点云也将被去除。故 背景深度的波动需要根据现场情况设置适合的值,一般推荐10mm。
调节示例
使用深度图去背景,只保留工件的点云。
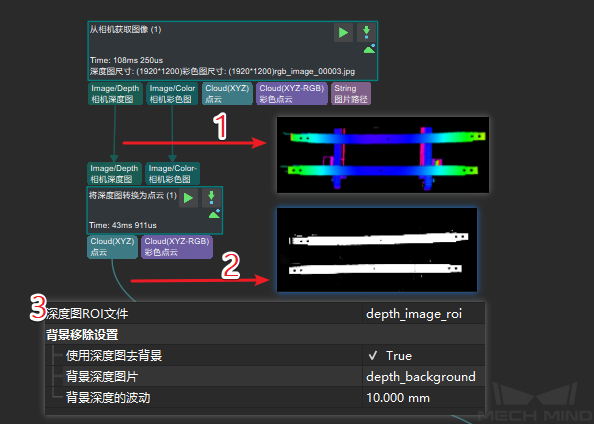
输入深度图。
输出点云。
参数设置(参考上述参数的调节步骤及调节示例)。
相似步骤对比
从相机获取图像 也可以直接输出点云和彩色点云。 但为了提升工程运行速度,一般使用 将深度图转换为点云 步骤作为获取点云和彩色点云的途径。
小技巧
使用 将深度图转换为点云 截取感兴趣区域来减少生产不必要点云的数量,进而提升运行速度。