获取最高层掩膜¶


各步骤作用¶
将深度图3D ROI外的区域置为无效 输入深度图,过滤掉非感兴趣区域,减少无用数据,加快处理速度。 如图4 所示,左侧为输入,右侧为输出。
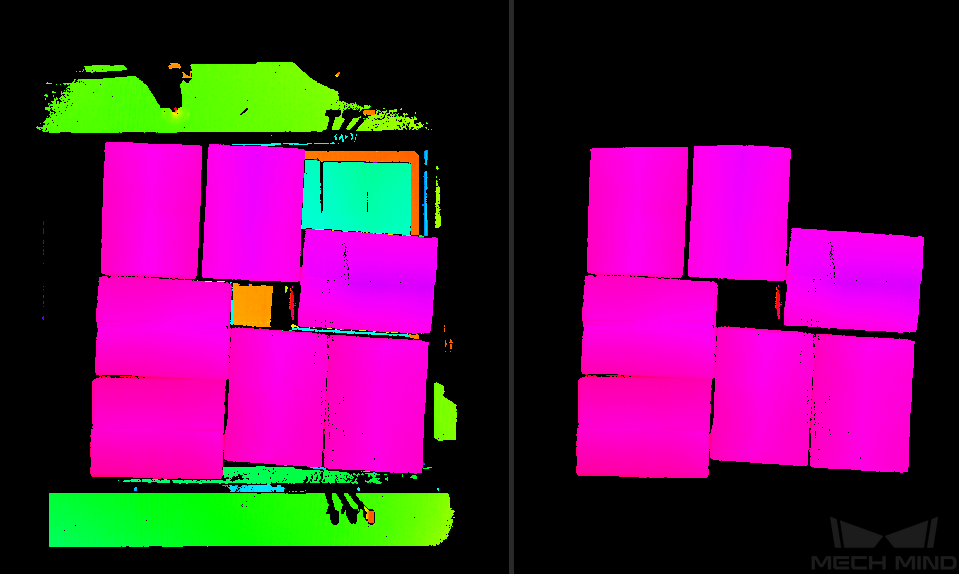
图4 将深度图3D ROI外的区域置为无效的输入输出对比¶
深度图分割 可根据不同高度,分割深度图并输出每个区域的掩膜,同时过滤小块杂点。 如 图5 所示,左侧为输入,右侧是以不同颜色标记的被分割后的掩膜。左侧箱子中间小块的红色杂点被滤除。
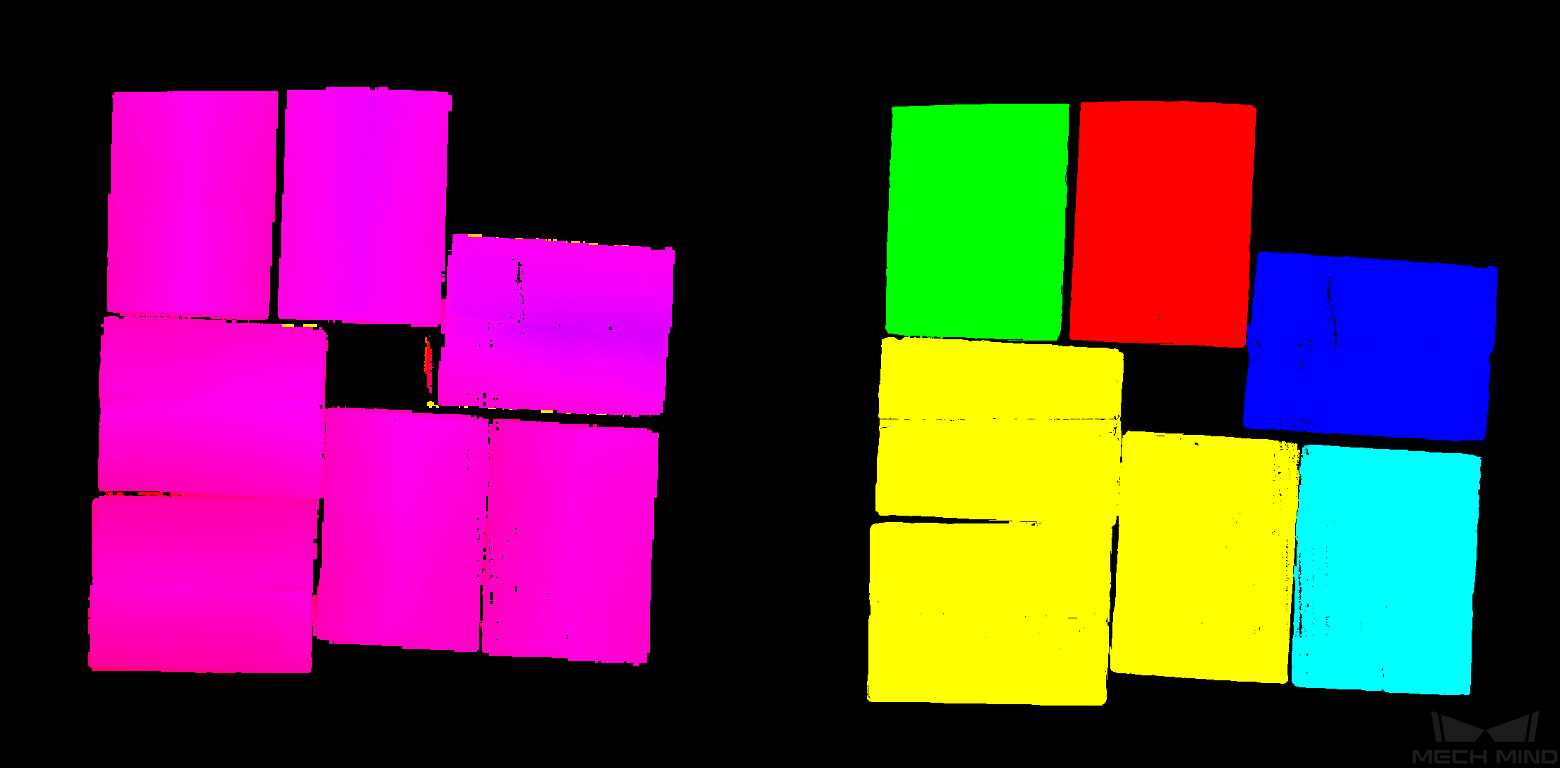
图5 深度图分割的输入输出对比¶
获取深度图中最高的区域 根据深度图和掩膜,输出离相机最近的有效区域的掩膜。 如 图6 所示,红色高亮部分是离相机最近的有效区域的掩膜。
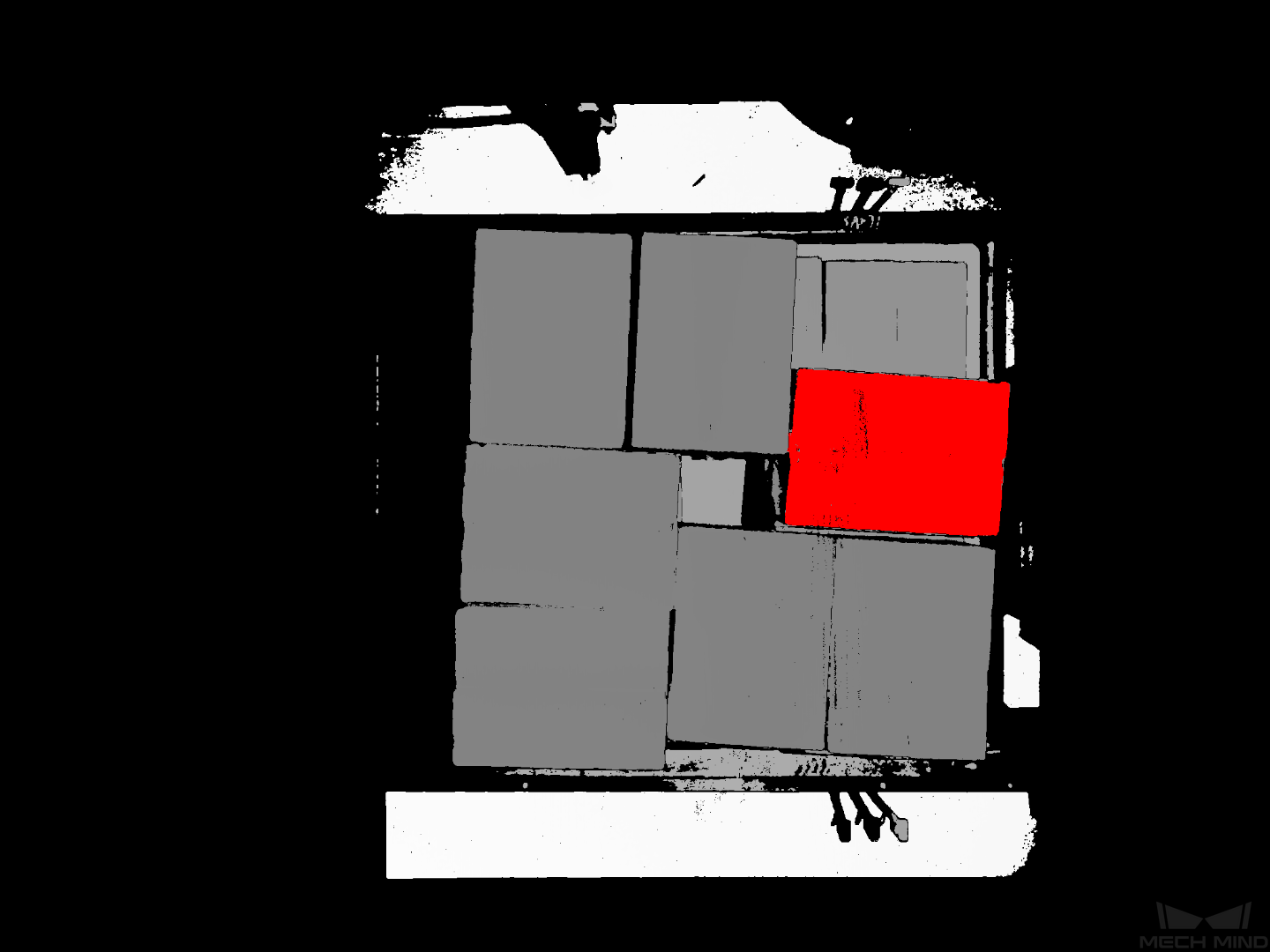
图7 获取深度图中最高的区域的结果¶
合并掩膜图像 将离相机最近的同一层的多个掩膜图像合并成一个掩膜图像。