开始你的第一个应用
软件使用指南
机器人通讯配置指南
应用指南
附录
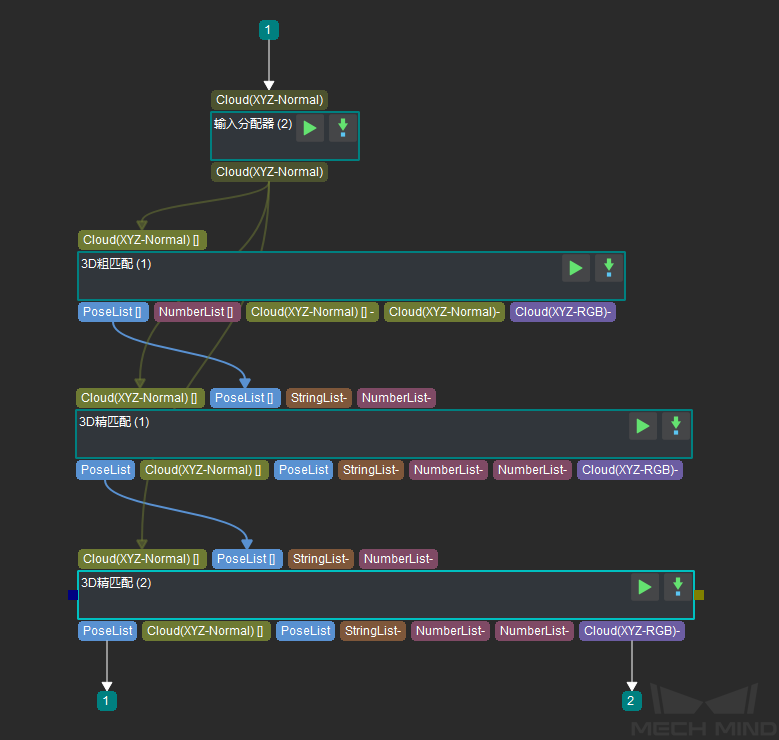
3D匹配(高精度)适用于需要精确计算物品位置的工程。采用工件模板和场景点云匹配的3D视觉处理方法,使用 3D粗匹配 和 3D精匹配,计算场景中物品的粗略位置,并进一步优化,最终得到较高精度的抓取点。 其组成如图1 所示。
图1 3D匹配(高精度)步骤组合¶
各个步骤的作用如下:
输入分配器 将输入的带法向量的点云分配给后续多个步骤。 3D粗匹配 输入的带法向量的点云,结合设置中的模板文件,计算场景中物体的初始抓取点并输出。 3D精匹配 输入的带法向量的点云和初始抓取点列表,结合设置中的模板文件,计算场景中物体较为精确的抓取点并输出。 3D精匹配 输入的带法向量的点云和上一步的结果,结合设置中的模板文件,进一步优化物体的抓取点,输出更加准确的抓取点列表。
输入分配器 将输入的带法向量的点云分配给后续多个步骤。
3D粗匹配 输入的带法向量的点云,结合设置中的模板文件,计算场景中物体的初始抓取点并输出。
3D精匹配 输入的带法向量的点云和初始抓取点列表,结合设置中的模板文件,计算场景中物体较为精确的抓取点并输出。
3D精匹配 输入的带法向量的点云和上一步的结果,结合设置中的模板文件,进一步优化物体的抓取点,输出更加准确的抓取点列表。