3D匹配
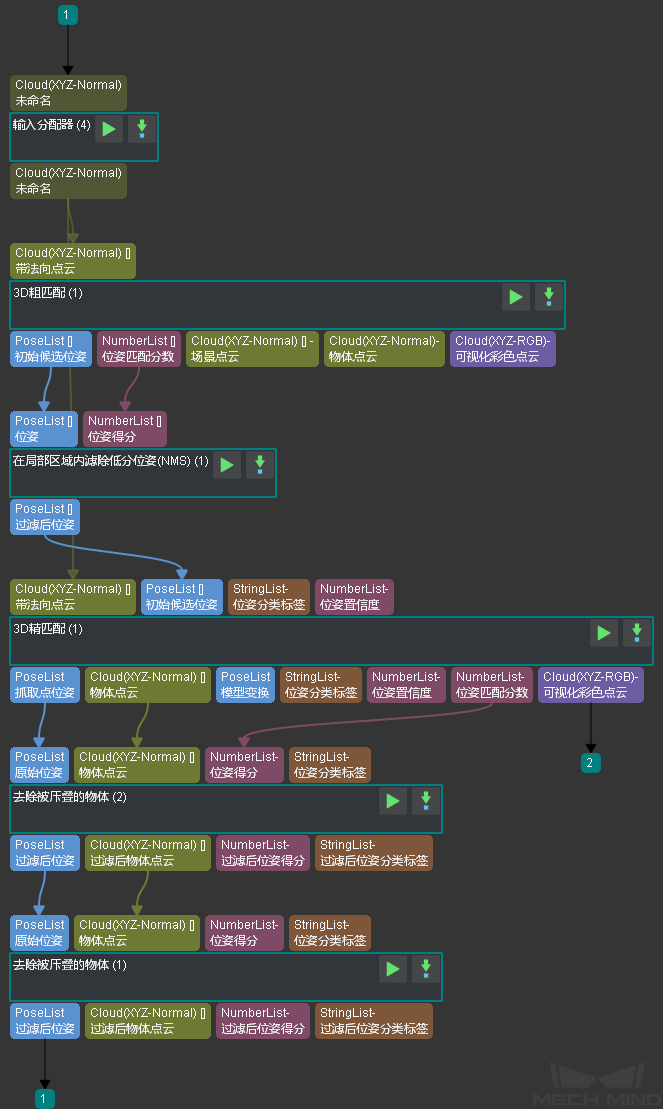
3D匹配的主要功能是通过物体点云模板匹配,识别出场景中的物体并得到其位姿。通常用在 滤除点数超限的点云 步骤之后。其组成如图1 所示。
将过滤后的点云输入此步骤组合,通过 3D粗匹配 计算被识别物体的初始位姿,初始位姿可能有多个。
然后通过 在局部区域内滤除低分位姿(NMS) 筛选出每个被识别物体最合理的位姿。
过滤后的位姿和点云经过 3D精匹配 可得到精确的位姿。
在水平方向筛选出被识别物体的位姿后,连接 去除被压叠的物体 ,沿物体Z轴方向,去除被压叠的物体,筛选出上层可抓取的位姿。