翻转位姿的坐标轴方向¶
功能描述
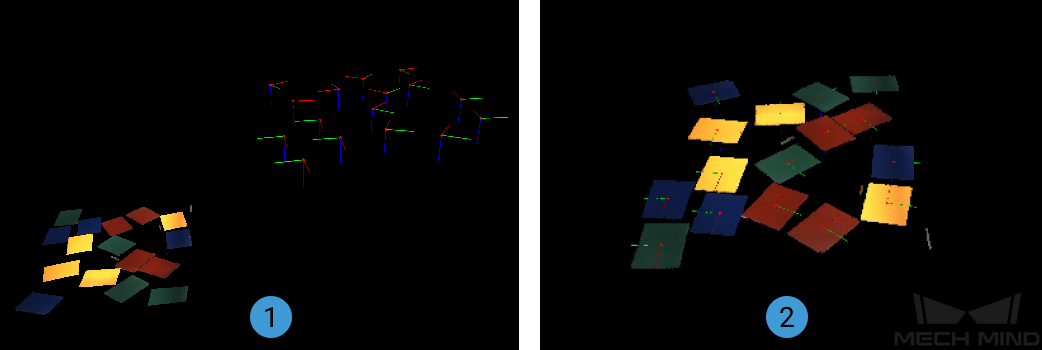
给定一个方向,调整输入的位姿某个轴的方向。
使用场景
通常用于位姿后处理阶段,将位姿的某个轴统一至一个朝向。
输入与输出
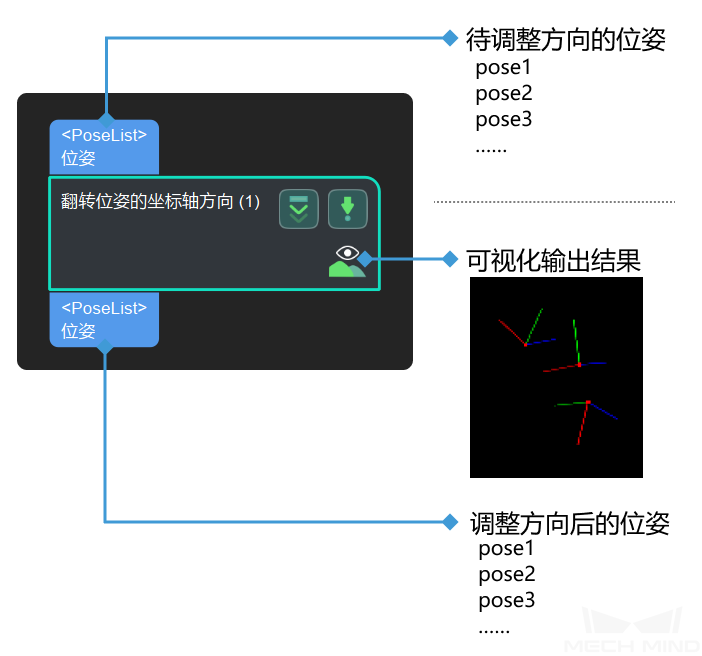
参数说明
可视化设置
- 在选定坐标系下显示点云
- 位姿显示设置
坐标轴设置
- 需要翻转的轴类型
- 方向类型
- 旋转基准轴
提示
需要翻转的轴与旋转基准轴不能为同一轴。
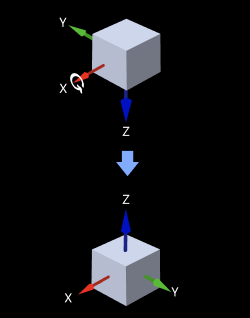
调节示例
此处以Z轴为翻转轴,X轴为旋转轴为例,如下图所示。
