스캔 모드
이 부분에서는 스캔 모드의 파라미터를 소개합니다.
1. 트리거 설정
트리거 소스를 선택하고 관련 파라미터를 설정합니다.
| 스캔 모드에서 데이터 획득을 위해 레이저 프로파일러를 트리거하는 방법은 데이터 획득을 트리거하는 방식 내용을 참조하십시오. |
1.1. 데이터 획득 방식
파라미터 설명 |
이 파라미터는 데이터 획득 버튼과 함께 데이터 생성 방법을 결정합니다. |
||
|---|---|---|---|
사용자 유형 |
초보자, 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
옵션에 따라 데이터 획득 버튼의 기능은 다음과 같습니다:
|
1.2. 데이터 획득 트리거 소스
파라미터 설명 |
데이터 획득을 트리거하는 신호 소스를 선택합니다. 한 라운드의 데이터 획득 과정에서는 여러 라인이 스캔되고, 여러 프로파일이 생성되며, 프로파일 데이터를 사용하여 하나의 광도 이미지와 하나의 뎁스 맵이 생성됩니다. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
외부 입력 신호를 사용하여 데이터 획득을 트리거하는 경우, 외부 입력 신호를 선택하세요. 그렇지 않으면 소프트웨어를 선택하세요.
|
1.3. 라인 스캔 트리거 소스
파라미터 설명 |
단일 라인의 스캔을 트리거하는 신호 소스를 선택합니다. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
다른 옵션을 선택한 후 조정을 위해 트리거 설정 그룹에 다른 파라미터가 표시됩니다: |
1.4. 엔코더: 엔코더 설정
라인 스캔 트리거 소스 파라미터를 엔코더로 설정하면 이 범주의 파라미터를 조정해야 합니다.
편집 버튼을 클릭하면 엔코더 설정 도구를 열 수 있습니다. 이 도구는 엔코더 값과 모션 방향을 확인하고 엔코더 해상도를 계산할 수 있습니다.
스캔 데이터의 Y축 해상도가 X축 해상도와 동일해야 하는 경우, 이 도구를 사용하여 트리거 간격 파라미터의 권장값을 얻을 수 있습니다.
1.4.1. 트리거 방향
파라미터 설명 |
스캐닝을 트리거하는 엔코더 동작 방향을 선택하십시오. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
엔코더의 모션 방향과 레이저 프로파일러를 기준으로 대상 물체의 이동 방향에 따라 조정하십시오.
|
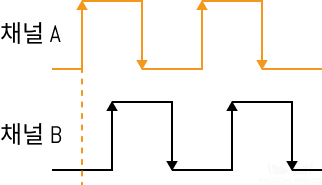
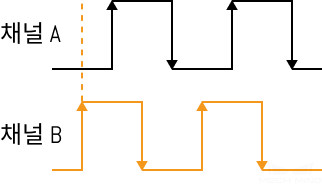
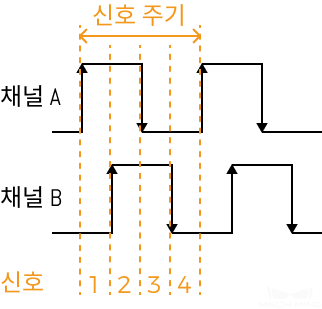
1.4.2. 트리거 신호 계산 모드
파라미터 설명 |
엔코더 주기에 계산할 직교 신호 수를 설정합니다. 계산된 신호는 스캐닝을 트리거하는 데 사용됩니다(이 신호는 바로 트리거 신호입니다). 각 엔코더 주기에는 아래와 같이 4개의 직교 신호가 포함됩니다.
|
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
이 파라미터는 트리거 간격과 함께 스캐닝을 트기러하는 빈도를 결정합니다.
|
1.4.3. 트리거 간격
파라미터 설명 |
한 라인을 스캔하는 데 필요한 트리거 신호 수를 설정합니다. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
이 파라미터는 트리거 신호 계산 모드와 함께 스캔을 트리거하는 빈도를 결정합니다.
|
1.5. 고정 빈도 : 트리거 빈도
파라미터 설명 |
라인 스캔 트리거 소스 파라미터가 고정 빈도로 설정된 경우 레이저 프로파일러 스캔을 트리거하는 고정 빈도를 설정합니다. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
|
1.6. 고정 빈도: 이동 속도
파라미터 설명 |
라인 스캔 트리거 소스 파라미터가 고정 빈도로 설정된 경우 레이저 프로파일러에 대한 대상 물체의 상대 이동 속도를 설정합니다. |
|---|---|
사용자 유형 |
초보자, 전문가, 마스터 |
조정 설명 |
이 파라미터는 스캔한 데이터의 Y 축 해상도를 계산하는 데 사용됩니다. 계산 방법은 다음과 같습니다: Y축 해상도(μm) = 이동 속도(μm/s) ÷ 트리거 빈도 |
1.7. 트리거 지연
파라미터 설명 |
레이저 프로파일러가 라인 스캔 트리거 신호를 수신하고 레이저 빔을 방출하는 사이의 지연 시간을 설정합니다. |
|---|---|
사용자 유형 |
마스터 |
파라미터 값 |
|
조정 설명 |
1.7.1. 트리거 지연 조정
다음과 같은 상황에서는 트리거 지연 파라미터를 조정해야 합니다:
-
여러 레이저 프로파일러를 사용하여 동일한 대상 물체를 동시에 스캔합니다.
-
모든 레이저 프로파일러의 라인 스캔은 동일한 엔코더에 의해 트리거됩니다.
-
레이저 프로파일러의 FOV는 서로 겹치게 되며 레이저 프로파일러가 동시에 레이저 빛을 방출하면 서로 간섭합니다.
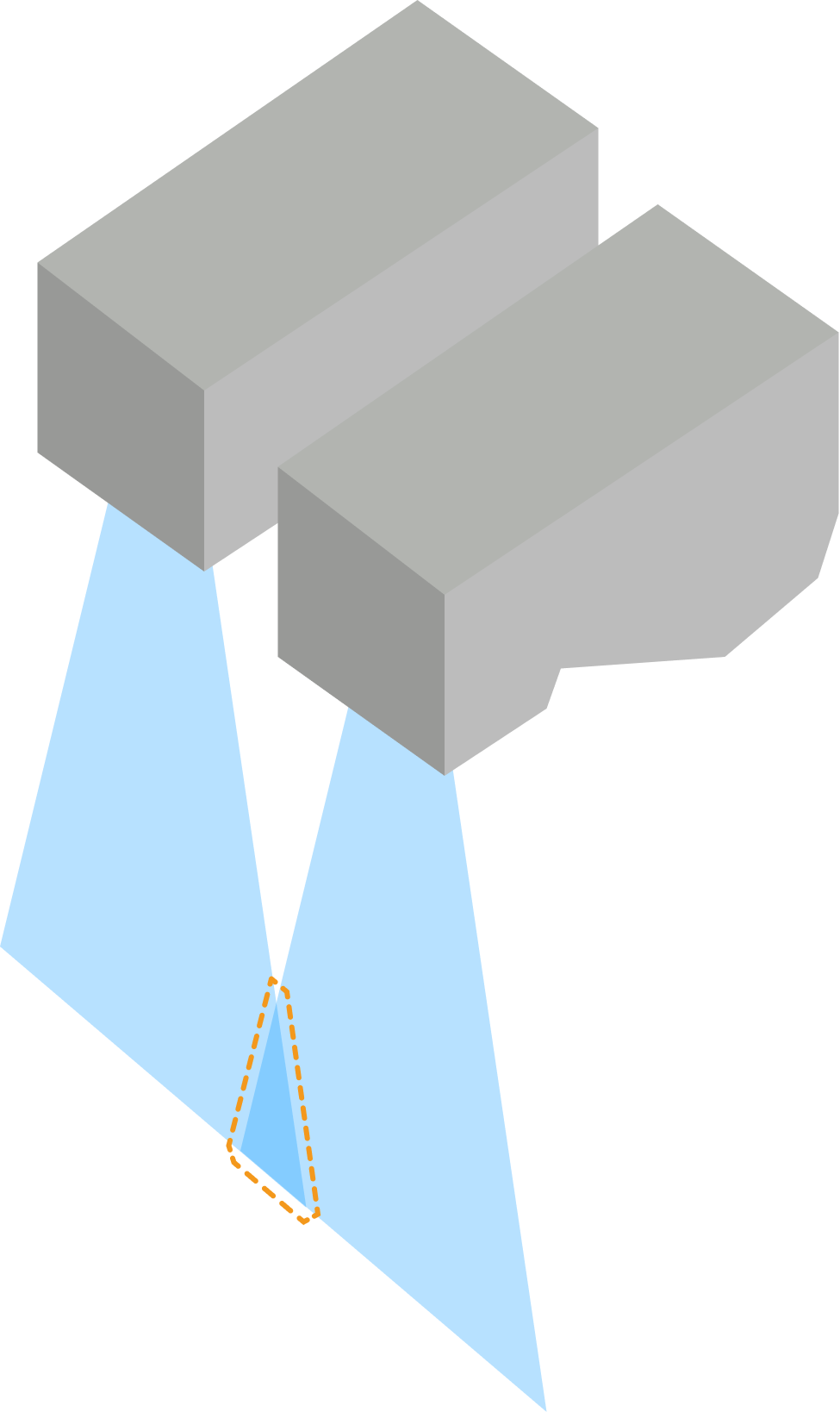
트리거 지연 파라미터의 값을 적절하게 설정한 후, 각 레이저 프로파일러는 서로 다른 시간에 맞춰 레이저 빛을 방출하고 간섭 없이 데이터를 획득합니다.
|
트리거 지연 파라미터를 조정하면 다음 효과가 있습니다:
|
다음 작업을 수행하여 트리거 지연 파라미터를 조정하십시오:
-
프로파일 모드 및 스캔 모드 내용을 참조하여 각 레이저 프로파일러의 데이터 품질이 요구사항을 충족할 수 있도록 파라미터를 조정하십시오.
-
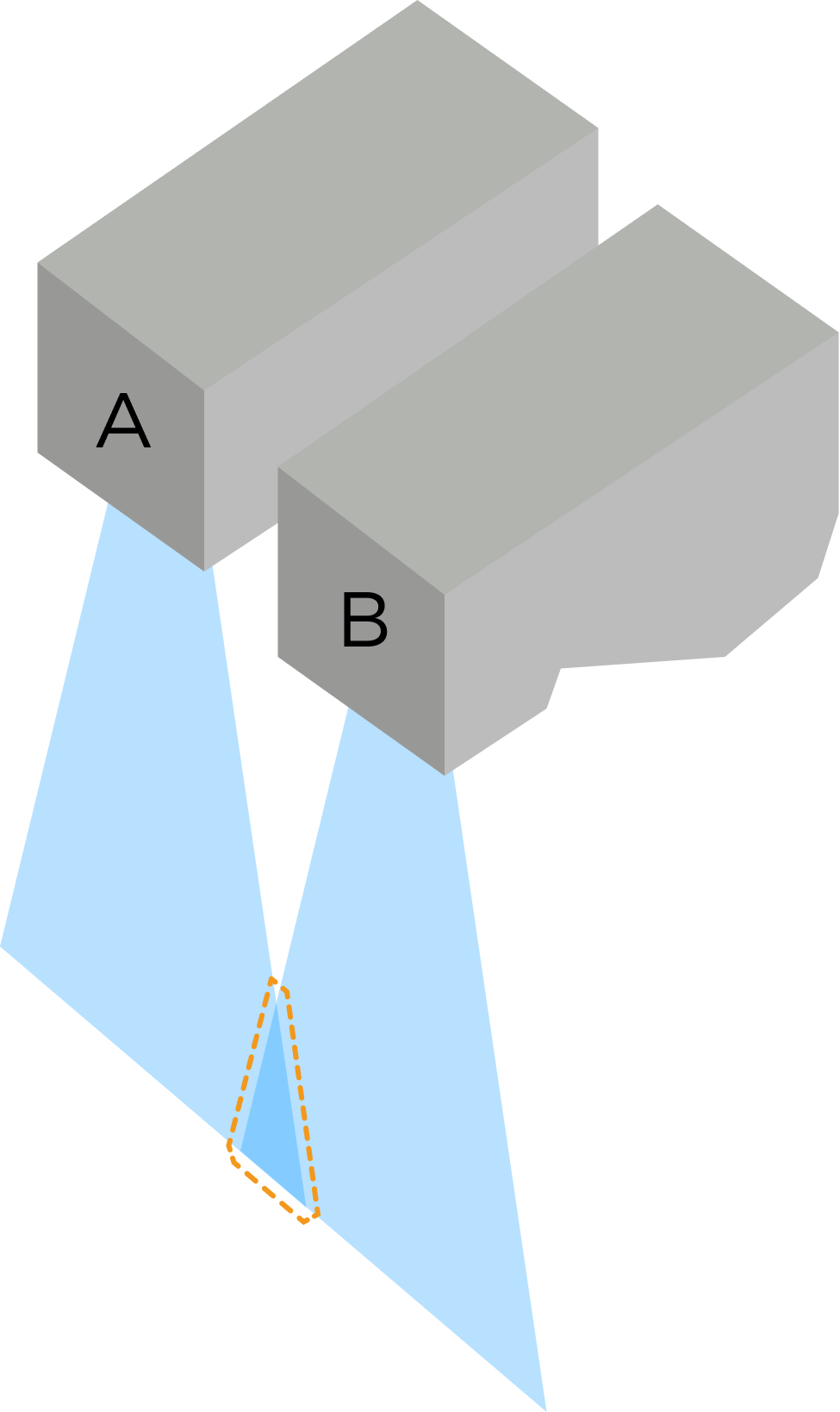
2개 이상의 레이저 프로파일러를 사용하는 경우 FOV가 겹치는지 확인해야 합니다:
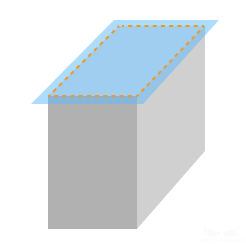
FOV 겹치는지 여부
모든 레이저 프로파일러의 FOV가 겹치는 경우
일부 레이저 프로파일러의 FOV가 겹치지 않은 경우(아래 그림 속의 A,C)
공간 관계 예시
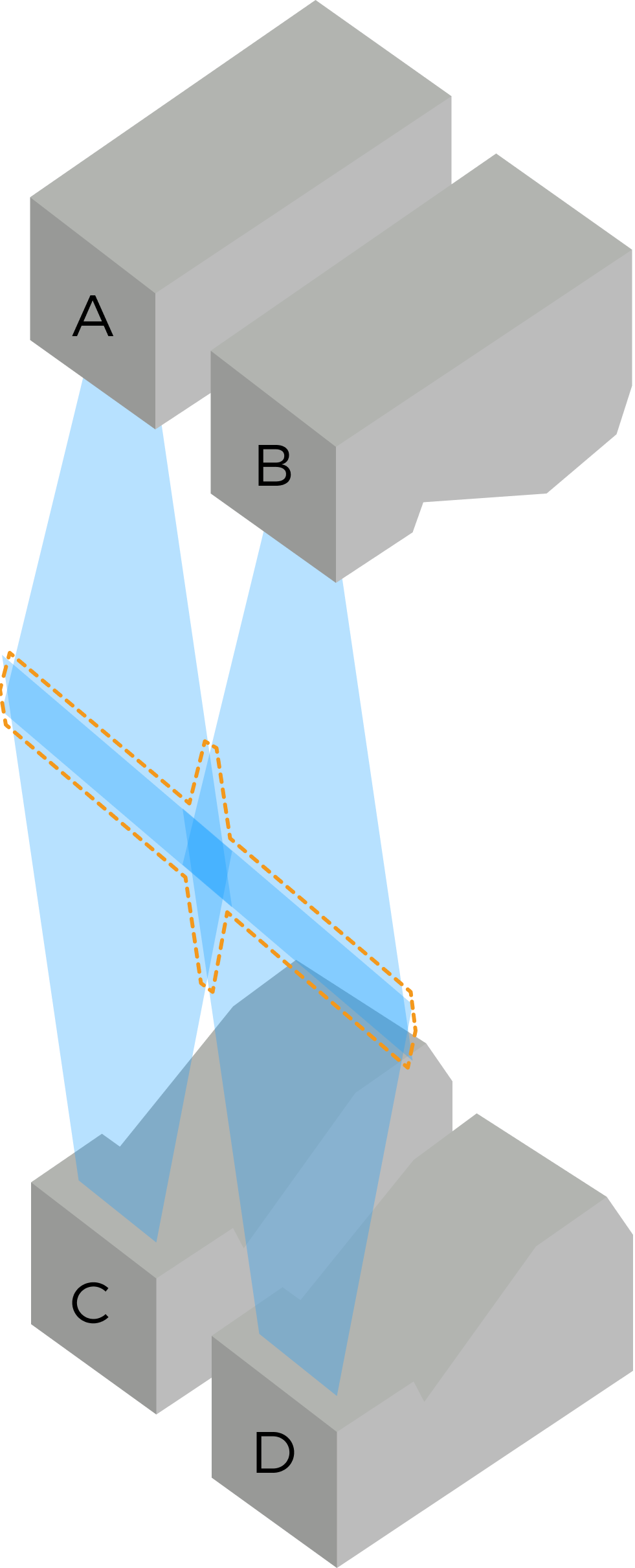
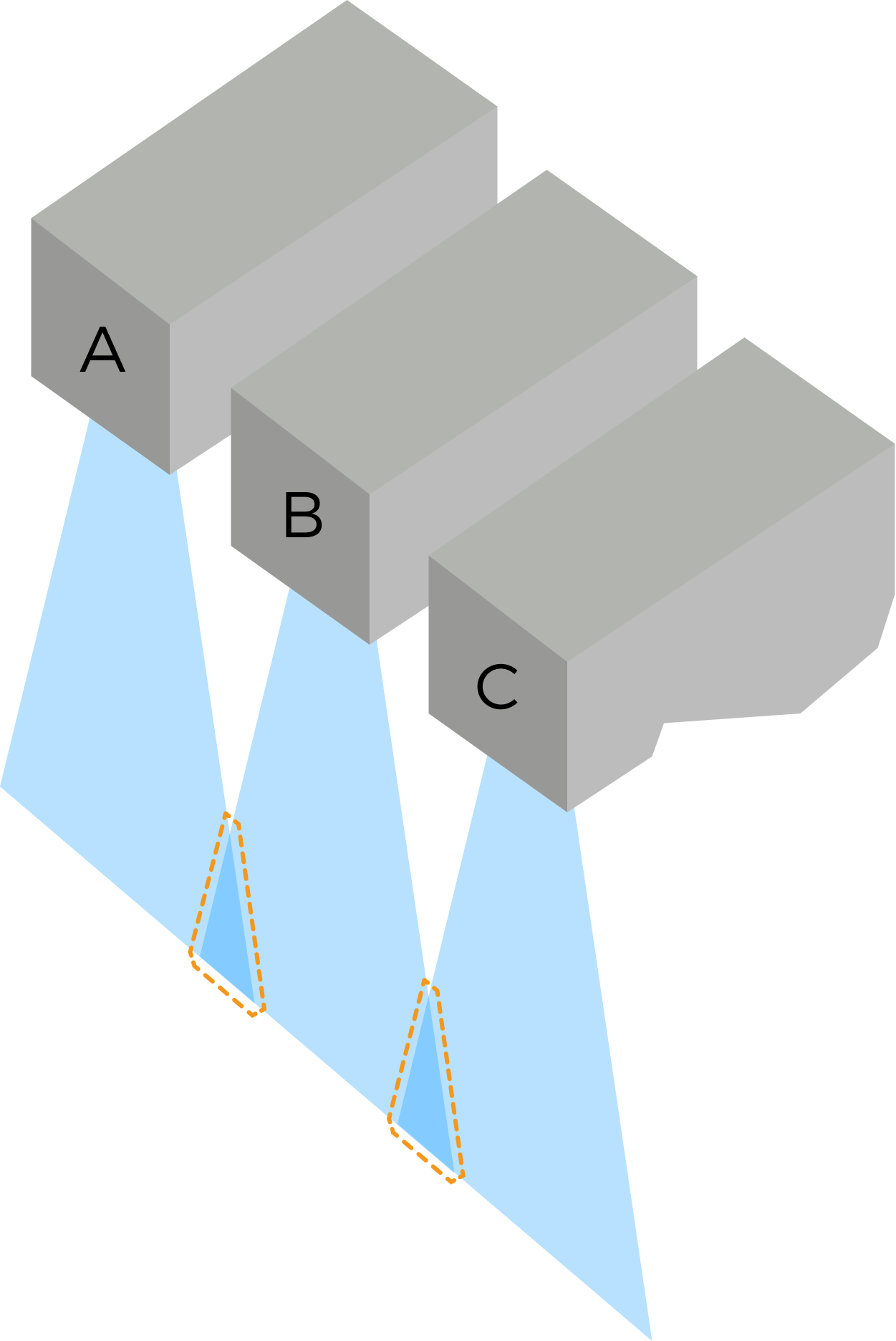
트리거 지연을 조정하는 목적은 겹치는 FOV에서 간섭을 피하는 것입니다. 위 표 오른쪽 이미지의 레이저 프로파일러 A와 C는 겹치지 않으므로 동시에 레이저 빛을 방출할 수 있습니다. 레이저 프로파일러 B의 트리거 지연만 조정하면 레이저 프로파일러 A와 C보다 나중에 레이저 빛이 방출됩니다.
-
아래 표의 공간 관계와 파라미터 설정 예시를 참조하여 각 레이저 프로파일러에 대한 트리거 지연 파라미터를 설정하십시오:
-
가장 먼저 레이저 빛을 방출해야 하는 레이저 프로파일러를 결정하고 이 레이저 프로파일러의 트리거 지연 파라미터는 기본값 0으로 설정하면 됩니다.
-
두번째로 레이저 빛을 방출해야 하는 레이저 프로파일러를 결정하고 아래 공식에 따라 해당 레이저 프로파일러의 트리거 지연 파라미터 값을 설정합니다:
레이저 프로파일러는 Raw 이미지의 레이저 라인의 안정적인 밝기를 보장하기 위해 레이저 광을 방출한 후 10μs 후에 노출을 시작합니다. -
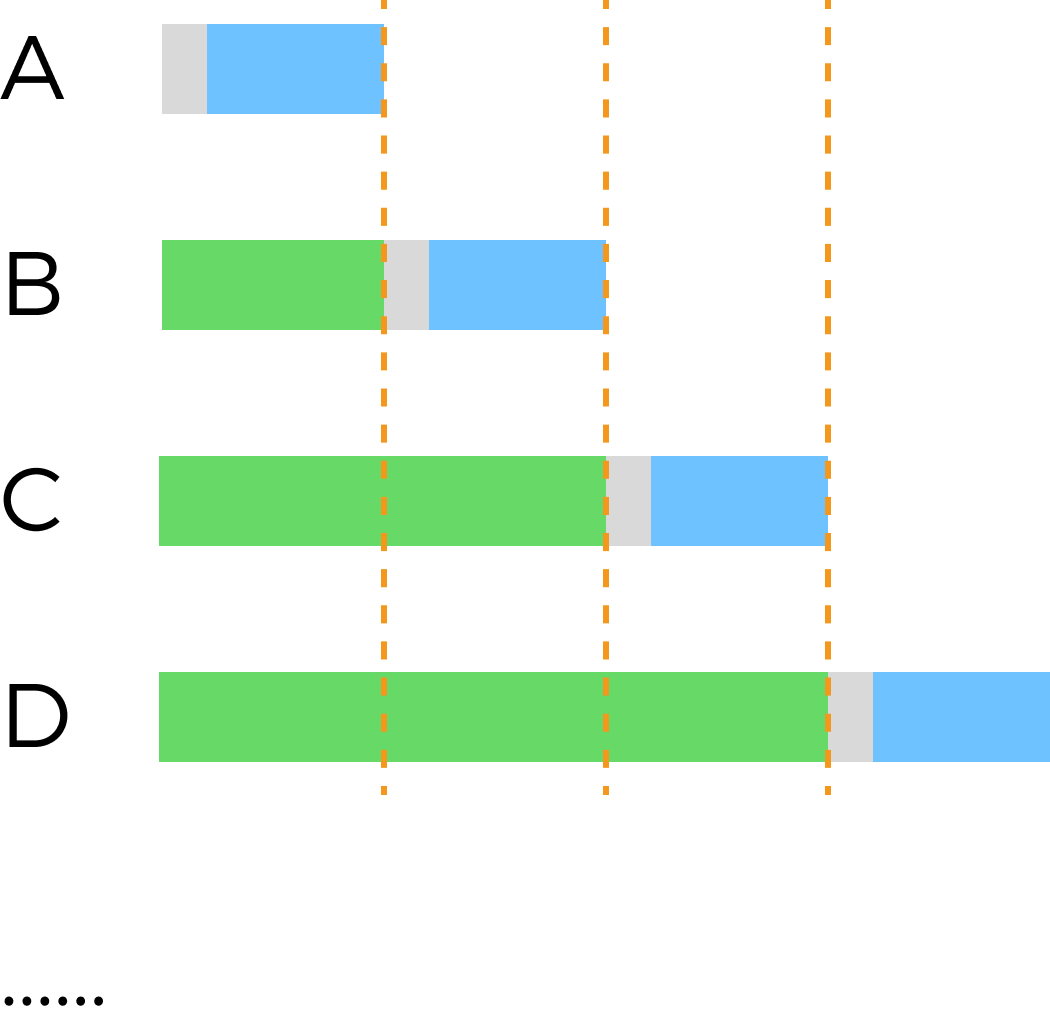
세번째로 레이저 빛을 방출해야 하는 레이저 프로파일러를 결정하고 아래 공식에 따라 해당 레이저 프로파일러의 트리거 지연 파라미터 값을 설정합니다:
-
이 방법으로 모든 레이저 프로파일러에 대한 트리거 지연 파라미터 값을 설정합니다.
공간 관계 예시
파라미터 설정
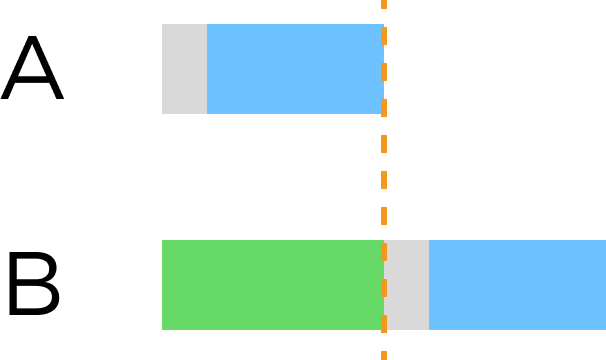

 : 노출 지연 시간(10μs)
: 노출 지연 시간(10μs) : 노출 시간/총 노출 시간
: 노출 시간/총 노출 시간 : 트리거 지연
: 트리거 지연
-
2. 스캔 설정
스캔 과정에 영향을 주는 기타 파라미터를 설정합니다.
2.1. 스캔 라인 수
파라미터 설명 |
이 파라미터는 데이터 획득의 프로파일 수를 설정합니다. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
|
2.2. 스캔 거리
파라미터 설명 |
현재 스캔 중인 거리를 표시합니다. 계산 방법은 다음과 같습니다: 스캔 거리(μm) = 스캔 라인 수 × Y축 해상도(μm) |
|---|---|
사용자 유형 |
초보자, 전문가, 마스터 |
조정 설명 |
이 파라미터는 읽기 전용입니다. |
2.3. 데이터 획득 제한 시간
파라미터 설명 |
데이터 획득에 대한 제한 시간을 설정합니다. 데이터 획득 과정이 트리거된 후 소프트웨어가 설정된 제한 시간 내에 데이터를 수신하지 않으면 현재 데이터 획득 라운드가 자동으로 중지됩니다. |
|---|---|
사용자 유형 |
전문가, 마스터 |
파라미터 값 |
|
조정 설명 |
해당 파라미터 값은 1행 스캔에 소요되는 시간보다 짧지 않아야 합니다. 행 스캔 트리거 빈도가 느릴 경우, 이 파라미터 값을 늘려야 합니다. |
2.4. 밝기 조정
파라미터 설명 |
광도 맵의 밝기를 조정합니다. 이 파라미터의 값이 클수록 광도 맵이 더 밝아집니다. |
|---|---|
사용자 유형 |
전문가, 마스터 |
파라미터 값 |
|
조정 설명 |
|
밝기 조정 값이 다른 광도 이미지(다른 모든 조건은 동일):
| 밝기 조정: 0.5× | 밝기 조정: 1× | 밝기 조정: 2× |
|---|---|---|
|
|
|

3. 해상도
스캔 데이터의 X축 해상도와 포인트 클라우드 Y축 해상도를 설정합니다.
3.1. X축 해상도
파라미터 설명 |
스캔 데이터의 X축 해상도를 설정합니다. 이는 레이저 라인 방향으로 두 이웃 포인트 사이의 거리를 나타냅니다. |
||
|---|---|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
||
파라미터 값 |
|
||
조정 설명 |
|
4. 마스크
파라미터 설명 |
마스크를 사용하여 상호 반사 및 노이즈로 인해 생성된 레이저 빔과 같은 불필요한 데이터를 제거합니다. |
|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
파라미터 값 |
마스크 사용 기능 활성화:
|
조정 설명 |
편집 버튼을 클릭하여 마스크 도구를 엽니다. 상세한 작업 설명은 아래의 마스크 도구 사용 내용을 참조하십시오. |
4.1. 마스크 도구 사용
마스크 도구를 사용하면 마스크를 추가, 편집 또는 삭제할 수 있습니다.
4.1.1. 마스크 추가
다음 단계를 수행하여 마스크를 추가하십시오:
-
왼쪽에서 원하는 마스크 도구를 선택하십시오:
-
 : 직사각형 마스크를 추가하는 데 사용됩니다.
: 직사각형 마스크를 추가하는 데 사용됩니다. -
 : 다각형 마스크를 추가하는 데 사용됩니다.
: 다각형 마스크를 추가하는 데 사용됩니다.
-
-
원시 이미지에서 가려야 할 데이터의 위치를 확인하고 마스크를 그립니다:
-
직사각형 도구: 마우스 왼쪽 버튼을 누른 상태에서 드래그합니다.
-
다각형 도구: 마우스 왼쪽 버튼을 클릭하여 다각형 마스크의 꼭짓점을 추가합니다. 필요한 꼭짓점을 모두 추가한 후, Enter키를 누르거나 마우스 오른쪽 버튼을 클릭하여 다각형 마스크의 그리기를 마칩니다.
다각형 마스크에서 겹치는 영역은 효과적이지 않습니다:

-
-
모든 마스크를 추가한 후 적용 버튼을 클릭하여 현재 창을 닫습니다.
적용 버튼을 클락하면 마스크 사용 기능은 자동으로 활성화됩니다. 마스크를 사용할 필요가 없으면 이 기능을 활성화하지 마십시오.
4.1.2. 마스크 편집
마스크의 위치, 모양 또는 크기가 요구 사항을 충족할 수 없는 경우, 다음 단계를 수행하여 마스크를 편집하십시오:
-
왼쪽에서
 버튼을 클릭하십시오.
버튼을 클릭하십시오. -
편집할 마스크를 선택한 후 다음과 같이 조정하십시오:
-
마스크를 이동하려면 마스크를 선택하고 드래그하십시오.
-
직사각형 마스크의 크기를 조정하려면 직사각형 마스크의 한 꼭짓점을 선택하여 드래그합니다.
-
다각형 마스크의 모양을 조정하려면:
-
기존 꼭짓점의 위치를 변경하려면 다각형 마스크의 한 꼭짓점을 선택하여 드래그합니다.
-
새 꼭짓점을 추가하려면 다각형 마스크의 가장자리를 마우스 왼쪽 버튼으로 클릭합니다.
-
기존 꼭지점을 삭제하려면 다각형 마스크의 꼭짓점을 선택하고 마우스 오른쪽 버튼을 클릭합니다.
상단의 다시 획득 버튼을 클릭하면 마스크를 편집한 후의 원시 이미지를 다시 획득하고 마스크 효과를 확인할 수 있습니다.
-
-
-
마스크를 편집한 후 적용 버튼을 클릭하여 현재 창을 닫습니다.
적용 버튼을 클락하면 마스크 사용 기능은 자동으로 활성화됩니다. 마스크를 사용할 필요가 없으면 이 기능을 활성화하지 마십시오.
4.1.3. 마스크 삭제
다음 단계를 수행하여 불필요한 마스크를 삭제하십시오:
-
오른쪽 표시줄의 마스크 리스트에서 불필요한 마스크를 선택하고
 버튼을 클릭하십시오.
버튼을 클릭하십시오.리스트에 있는 모든 마스크를 삭제하려면 마스크 리스트 오른쪽의 지우기 버튼을 클릭할 수 있습니다. -
다음 팝업 창에서 확인 버튼을 클릭하여 마스크를 삭제합니다.
상단의 다시 획득 버튼을 클릭하면 마스크를 삭제한 후의 원시 이미지를 다시 획득하고 마스크 효과를 확인할 수 있습니다. -
마스크를 삭제한 후 적용 버튼을 클릭하여 현재 창을 닫습니다.
적용 버튼을 클락하면 마스크 사용 기능은 자동으로 활성화됩니다. 마스크를 사용할 필요가 없으면 이 기능을 활성화하지 마십시오.
5. 프로파일 정렬
이 그룹의 파라미터는 X 및 Z축을 따라 프로파일의 진동을 보정하는 데 사용됩니다.
5.1. X축 프로파일 정렬
파라미터 설명 |
이 도구는 프로파일의 X축 진동을 보정합니다. |
|---|---|
사용자 유형 |
전문가, 마스터 |
파라미터 값 |
X축 프로파일 정렬 활성화 기능:
|
조정 설명 |
데이터를 획득한 후 편집 버튼을 클릭하면 해당 도구를 열 수 있습니다. 상세한 작업 설명은 X축 프로파일 정렬 내용을 참조하십시오. |
다른 조건은 완전히 동일할 때, X축 프로파일 정렬 기능을 활성화하기 전과 활성화한 후의 뎁스 맵의 비교는 다음과 같습니다.
| 대상 물체 예시 그림 | 활성화 전 | 활성화 후 |
|---|---|---|
|
|
|
5.2. Z축 프로파일 정렬
파라미터 설명 |
프로파일의 Z축 진동을 보정합니다. |
|---|---|
사용자 유형 |
전문가, 마스터 |
파라미터 값 |
Z축 프로파일 정렬 활성화
|
조정 설명 |
데이터를 획득한 후 편집 버튼을 클릭하면 해당 도구를 열 수 있습니다. 상세한 작업 설명은 Z축 프로파일 정렬 내용을 참조하십시오. |
다른 조건은 완전히 동일할 때, Z축 프로파일 정렬 기능을 활성화하기 전과 활성화한 후의 포인트 클라우드의 비교는 다음과 같습니다:
| 대상 물체 예시 그림 | 활성화 전 | 활성화 후 |
|---|---|---|
|
|
|
6. 보정
이 범주의 파라미터는 프로파일의 기울기 각도와 높이 오차를 보정하는 데 사용됩니다.
6.1. 기울기 보정
파라미터 설명 |
이 도구는 Y축을 중심으로 한 레이저 프로파일러의 회전으로 인해 발생하는 프로파일의 기울기를 수정하는 데 사용됩니다. |
|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
파라미터 값 |
기울기 보정 활성화 기능 켜기:
기울기 보정 각도:
|
조정 설명 |
상세한 작업 설명은 기울기 보정 내용을 참조하십시오. |
6.2. 높이 보정
파라미터 설명 |
이 도구는 X축을 중심으로 한 레이저 프로파일러의 회전으로 인해 발생하는 프로파일의 높이 오차를 보정하는 데 사용됩니다. |
|---|---|
사용자 유형 |
초보자 , 전문가, 마스터 |
파라미터 값 |
높이 보정 활성화 기능 켜기:
높이 보정 비율:
|
조정 설명 |
상세한 작업 설명은 높이 보정 내용을 참조하십시오. |
7. 필터링
이 범주의 파라미터는 뎁스 맵과 포인트 클라우드에 대해 사각지대 필터링 및 노이즈 제거를 수행하는 데 사용됩니다.
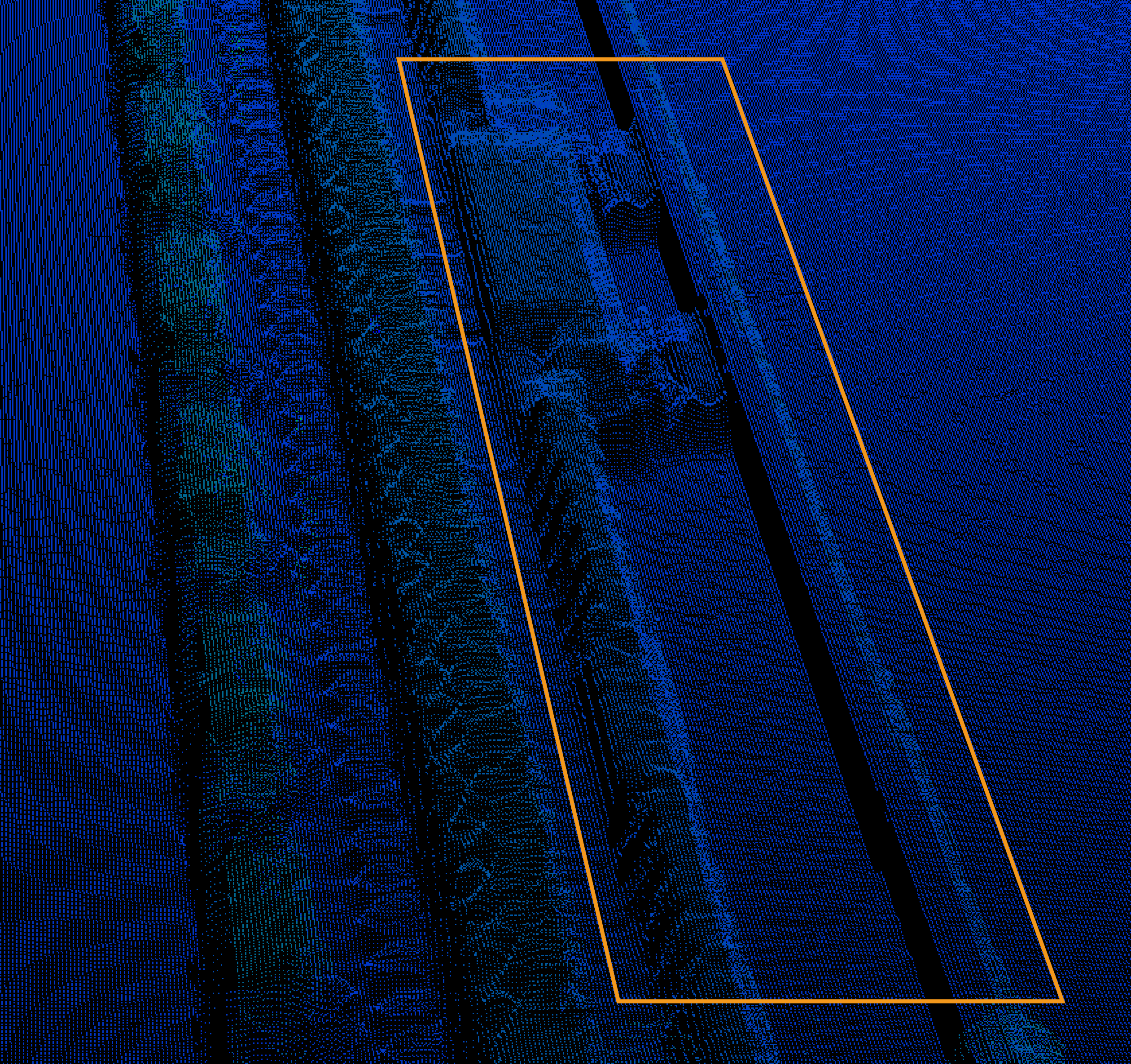
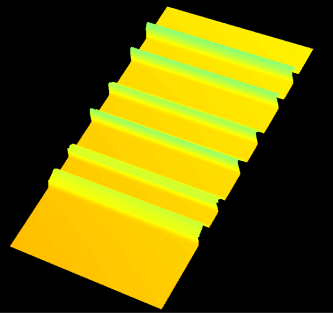
7.1. 사각지대 필터링
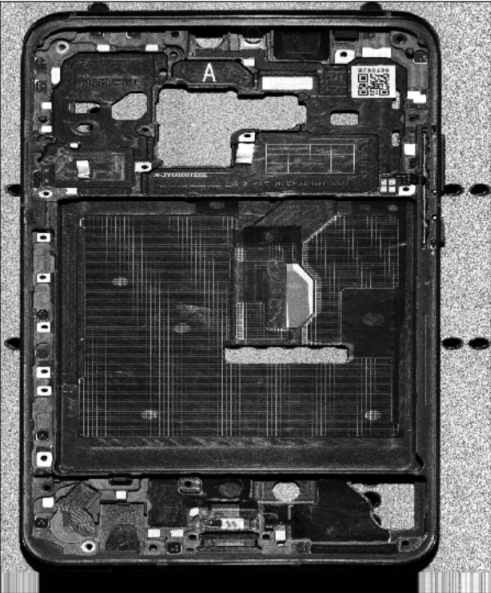
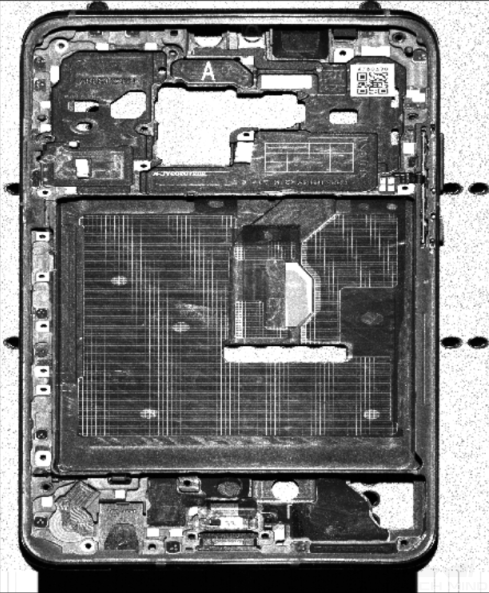
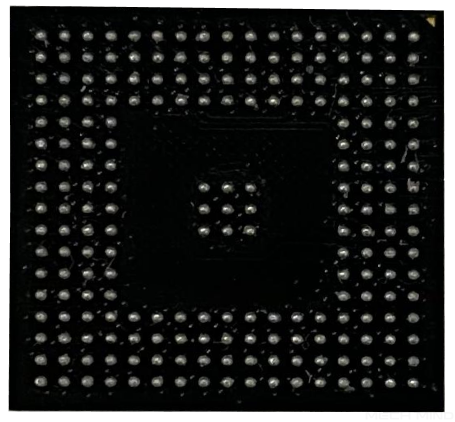
사각지대는 반사된 레이저 빔이 차단되는 대상 물체 표면의 영역입니다.
인쇄 회로 기판(PCB)과 같이 대상 물체의 표면에 움푹 들어간 곳이나 돌기가 촘촘하게 있는 경우 레이저 빛의 다중 반사가 발생하여 사각지대 근처에서 잘못된 데이터가 생성될 수 있습니다. 사각지대 필터링 기능을 사용하여 잘못된 데이터를 필터링할 수 있습니다.
파라미터 설명 |
사각지대로 인해 생성된 잘못된 데이터를 식별하여 제거함으로써 추가적인 데이터 처리에 미치는 영향을 방지합니다. |
|---|---|
사용자 유형 |
전문가, 마스터 |
파라미터 값 |
사각지대 필터링 활성화
Y축 해상도 : 스캔 데이터의 Y축 해상도를 표시합니다. 필터링 정도 : 사각지대 필터링의 강도를 표시합니다.
|
조정 설명 |
데이터를 획득한 후 편집 버튼을 클릭하면 해당 도구를 열 수 있습니다. 상세한 작업 설명은 사각지대 필터링 내용을 참조해 주십시오. |
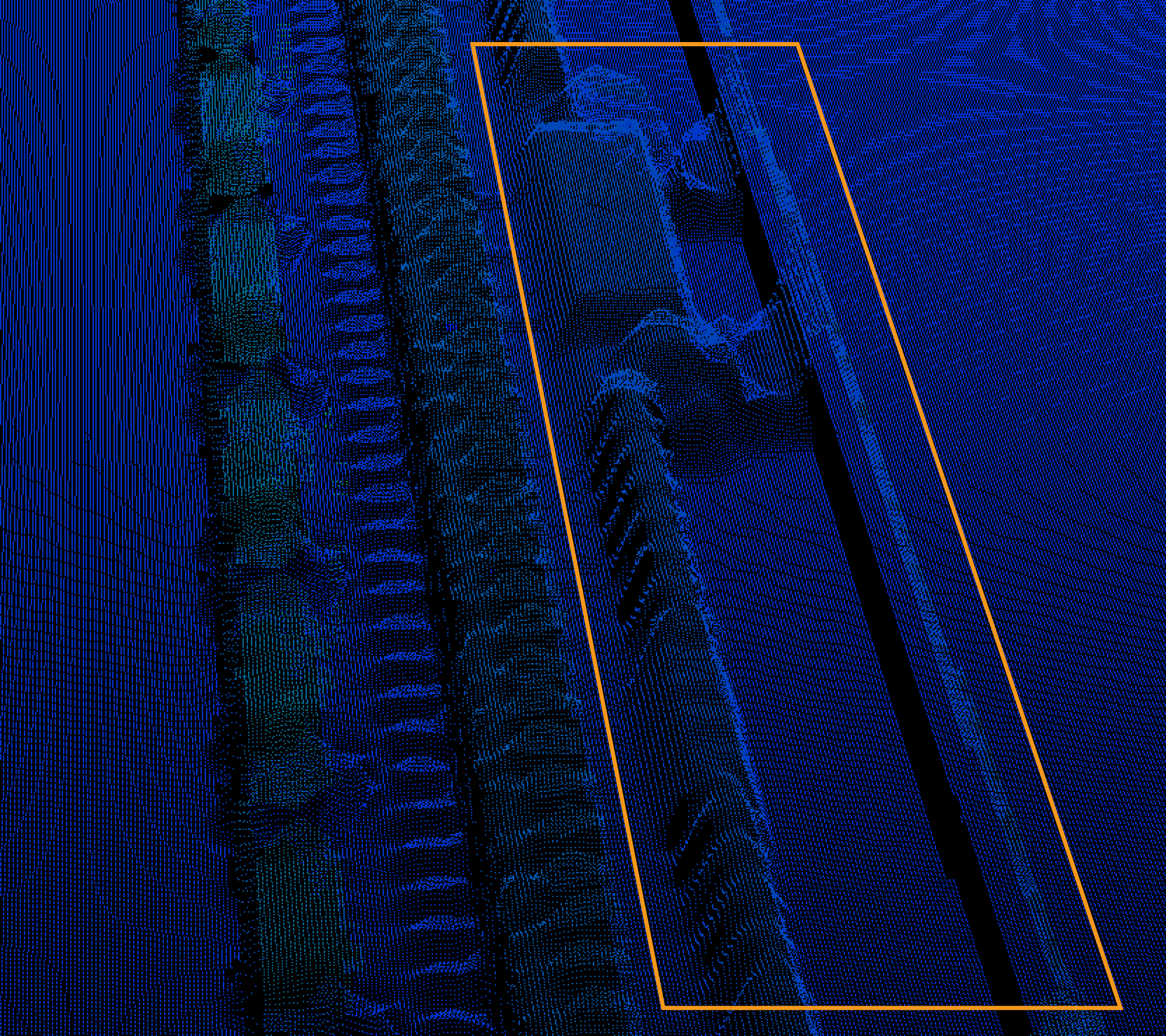
사각지대 필터링 기능을 활성화하기 전과 후의 포인트 클라우드 비교는 다음과 같습니다.
| 대상 물체 | 활성화 전 | 활성화 후 |
|---|---|---|
|
|
|
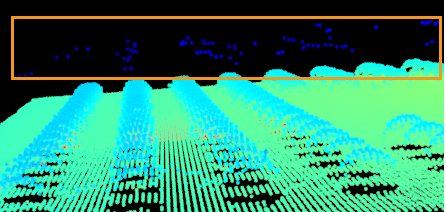
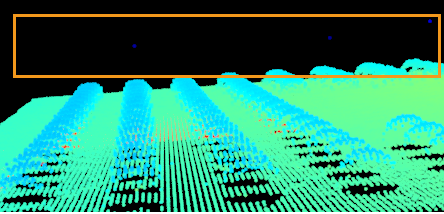
7.2. 노이즈 제거
파라미터 설명 |
뎁스 맵과 포인트 클라우드의 노이즈를 제거합니다. 노이즈는 물체 표면 근처에 흩어져 있는 점입니다. |
|---|---|
사용자 유형 |
전문가, 마스터 |
파라미터 값 |
노이즈 제거 활성화 기능 켜기:
노이즈 제거 정도:
|
조정 설명 |
|
다른 조건은 완전히 동일할 때, 노이즈 제거 기능을 활성화하기 전과 활성화한 후의 포인트 클라우드의 비교는 다음과 같습니다:
| 대상 물체 | 활성화 전 | 활성화 후 |
|---|---|---|
|
|
|